
Jugar
Parte 1 - Paso a paso
- InstruirIndique a los estudiantes que explorarán cómo conectar
de forma inalámbrica su robot Code Base a su dispositivo. Para comenzar, cada
grupo debe tener un dispositivo, el software VEXcode GO y un robot Code Base
construido.
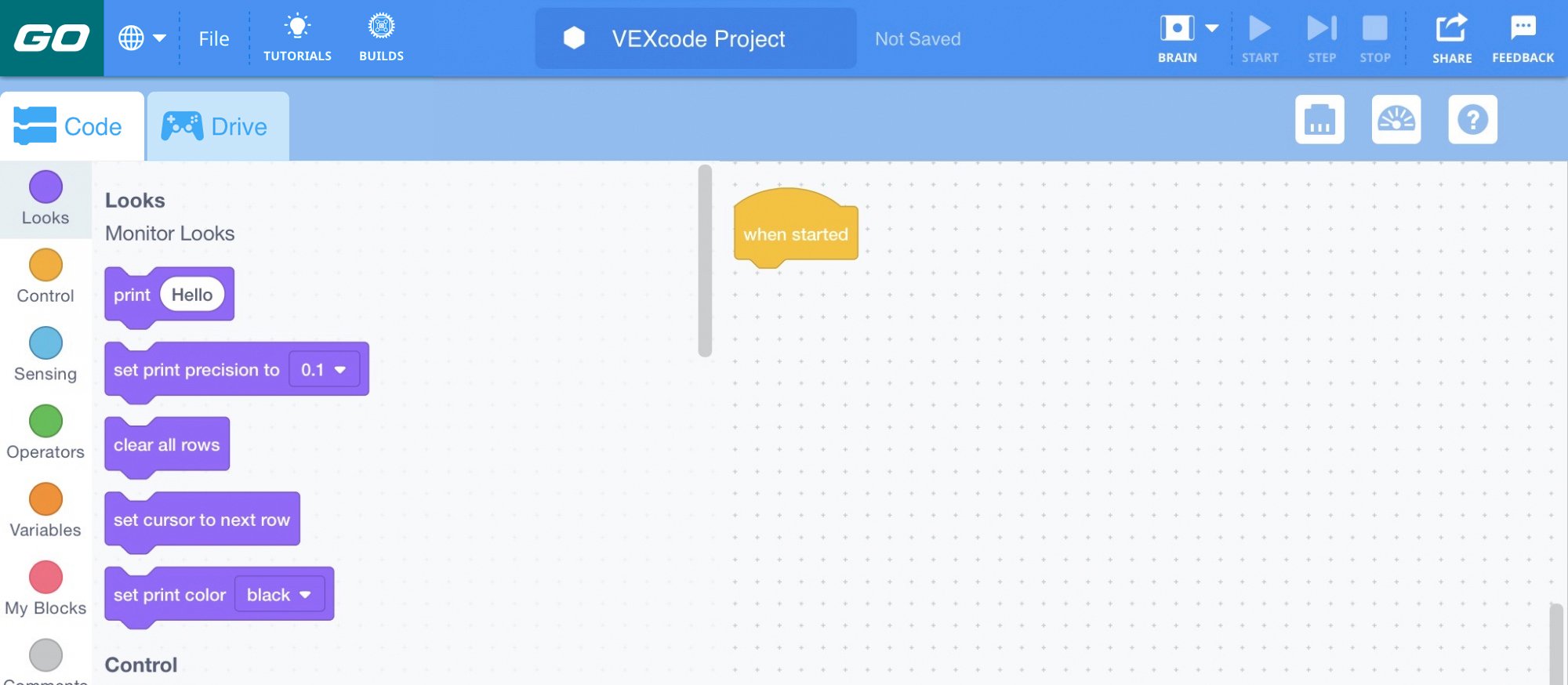
Código VEX GO - ModeloModelo sobre cómo iniciar VEXcode GO en un dispositivo y
los pasos para conectar un dispositivo al robot Code Base.
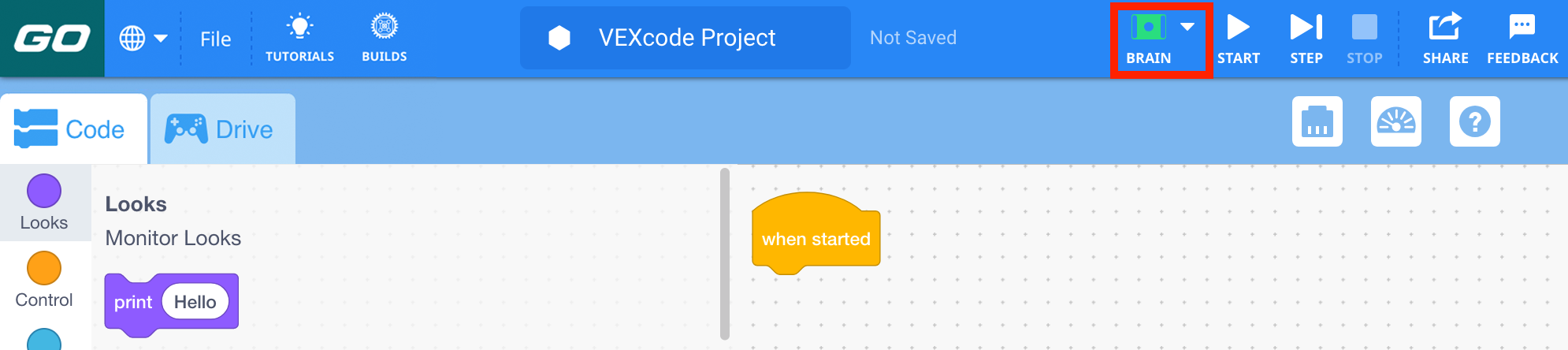
Siga los pasos del Conecte un cerebro VEX GO Biblioteca VEX artículo para que su dispositivo se conecte a su robot Code Base. Modelo para que los estudiantes comprueben que su robot Code Base se haya conectado correctamente, visualizando el ícono del Cerebro de color en la barra de herramientas.
Nota: Cuando conecta por primera vez su Code Base a su dispositivo, el giroscopio integrado en el cerebro puede calibrarse, lo que hace que la Code Base se mueva por sí sola por un momento. Este es un comportamiento esperado, no toque la base de código mientras se está calibrando.
Conecta el cerebro GO - FacilitarFacilite una discusión mientras los estudiantes
conectan sus dispositivos a VEXcode GO preguntando lo siguiente:
- ¿Cómo saber si su dispositivo está conectado correctamente?
- ¿Dónde está el icono del cerebro en la barra de herramientas?
- ¿Cuál es el primer paso para conectar su dispositivo de forma inalámbrica?
Conectarse a la base de código
- RecordarRecuerde a los estudiantes que aprender nuevos conceptos puede requerir varios intentos y anímelos a intentarlo nuevamente si no logran conectar su dispositivo en el primer intento.
- PreguntaPida a los estudiantes que piensen en cómo se pueden usar los robots para realizar trabajos en la vida real que sean sucios, aburridos o peligrosos. ¿Por qué sería mejor que un robot hiciera estos trabajos en lugar de un humano? ¿Puedes pensar en trabajos donde el robot hace todo el trabajo? ¿Qué pasa con los trabajos en los que un humano y un robot trabajan juntos?
Pausa a mitad de juego & Discusión en grupo
Tan pronto como cada grupo haya conectado con éxito su robot Code Base a su dispositivo, reúnanse para una conversación.
- ¿Cuál es el primer paso para conectar de forma inalámbrica su robot Code Base a su dispositivo?
- ¿Cómo sé si mi conexión inalámbrica fue exitosa?
- Si tuvieras que explicarle a un amigo usando palabras y gestos cómo conectar un robot Code Base a un dispositivo, ¿qué le dirías?
- ¿Tuviste alguna dificultad al conectarte? Si es así, ¿cómo lo superaste?
Parte 2 - Paso a paso
- InstruyaIndique a los estudiantes que ahora explorarán cómo
hacer que el robot Code Base se mueva. Para comenzar, cada grupo debe tener un
dispositivo, el software VEXcode GO y un robot Code Base construido.
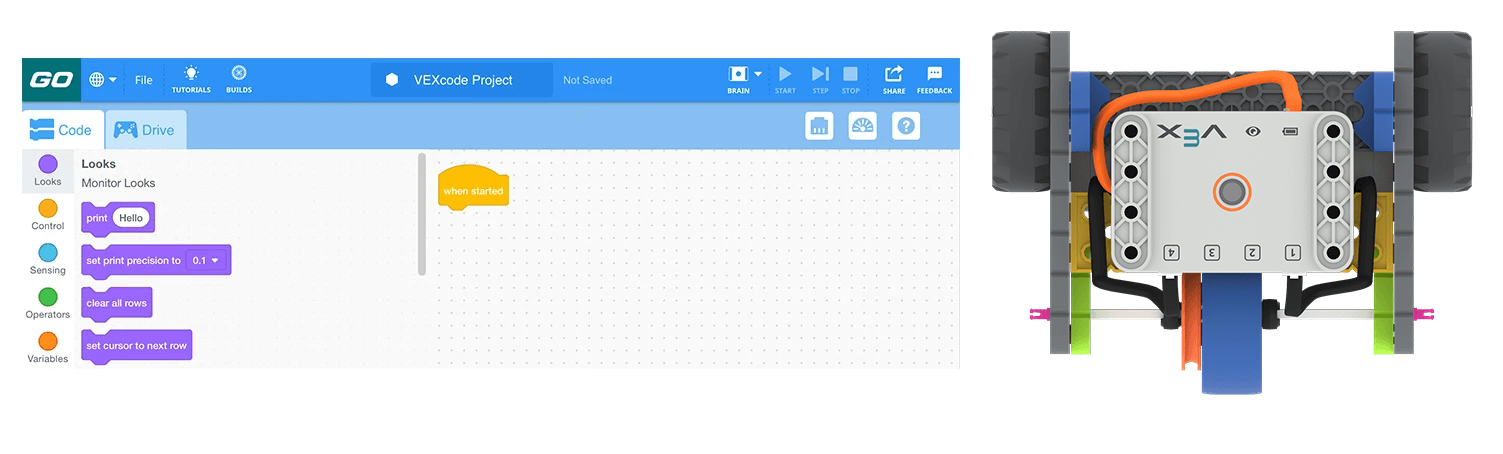
Uso de VEXcode GO con Code Base - ModeloModelo para que los estudiantes aprendan a abrir y
guardar su proyecto y configurar una base de código en VEXcode GO.
Modelo los pasos del Abrir y guardar un proyecto Artículo de la biblioteca VEX para su dispositivo y pídales que sigan los pasos para abrir y guardar su proyecto. Indique a los estudiantes que nombren su proyectoUnidad.

Nombra el proyecto Unidad Una vez que los estudiantes hayan nombrado su proyecto, deberán seguir los pasos para configurarlo para la base de código. Modele los pasos de la Configurar una base de código VEJAR artículo de la biblioteca y asegúrese de que los estudiantes puedan ver los bloques Drivetrain en el Caja de instrumento.
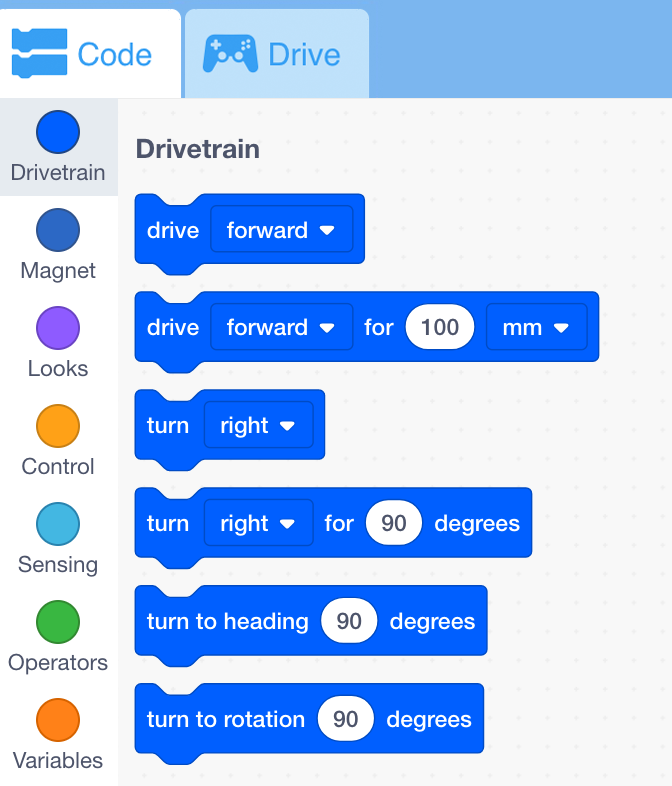
Muestra cómo arrastrar el bloque [Unidad para] al espacio de trabajo y colocarlo debajo del bloque {When started}.
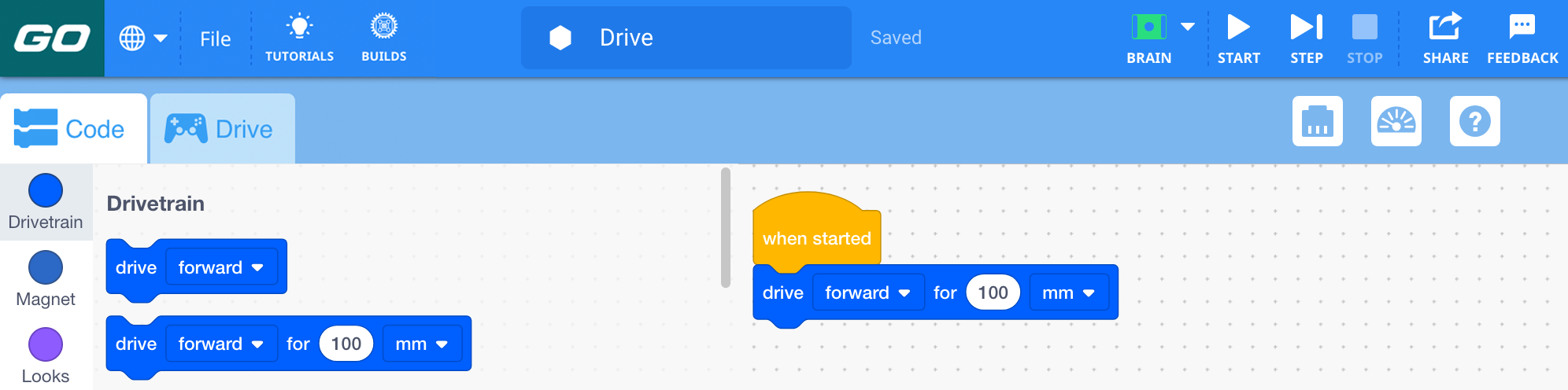
Agregue el bloque [Unidad para] Modelo para las estudiantes cómo iniciar el proyecto para poder probarlo.
- FacilitarFacilite una discusión mientras los estudiantes crean
y comienzan sus proyectos preguntando lo siguiente:
- ¿Dónde puedo encontrar el bloque [Drive for] en VEXcode GO?
- ¿Cómo agrego un bloque a mi proyecto?
- Antes de comenzar su proyecto, ¿qué espera que haga el Código Base?
- ¿Enfrentaste algún desafío al crear y comenzar tu proyecto? Si es así, ¿cómo los superaste?

Discuta el uso de VEXcode GO - RecordarRecuerde a los estudiantes que aprender nuevos conceptos puede requerir varios intentos y anímelos a intentarlo nuevamente si no tienen éxito al impulsar su robot Code Base en el primer intento.
- PreguntaPida a los estudiantes que piensen en qué trabajo o tarea podría realizar el robot Code Base si avanzara. ¿Podría entregar medicamentos a un paciente en un hospital? ¿Podría entregar paquetes? ¿Posiblemente conducir en algún lugar que sea demasiado peligroso o pequeño para un humano? Pídeles a los estudiantes que piensen al menos dos escenarios o trabajos en los que puedan usar el robot Code Base para completar una tarea.
Opcional: Si es posible, mantenga la base de código reunida para otros laboratorios de esta unidad.