الدرس 1: مستشعر الموقع
في هذا الدرس، ستتعلم ما هو مستشعر الموقع وكيفية استخدام مستشعر الموقع للتنقل في روبوت الواقع الافتراضي على مستوى الإحداثيات في ملعب خريطة شبكة الأرقام. سوف تتعلم كيفية عمل مستشعر الموقع وكيفية استخدام مستشعر الموقع في مشروع VEXcode VR.
مخرجات التعلم
- حدد أن مستشعر الموقع يقرأ الإحداثيات (X،Y) من نقطة التحول المركزية لروبوت الواقع الافتراضي.
- حدد أن كتلة (موضع الروبوت) تشير إلى موضع الإحداثيات X أو Y لروبوت الواقع الافتراضي إما بالمليمترات أو البوصات.
- صف سبب استخدام مستشعر الموقع في مشروع VEXcode VR.
- حدد كيفية إنشاء مشروع يحتوي على محرك روبوت الواقع الافتراضي على طول المحور X حتى تكون قيمة مستشعر الموقع أكبر من قيمة الحد الأدنى.
- اشرح كيف تتغير قيم الإحداثيات عند تشغيل روبوت الواقع الافتراضي (على سبيل المثال عند تشغيل روبوت الواقع الافتراضي مباشرة على الملعب، تزداد قيمة X).
مستشعر الموقع
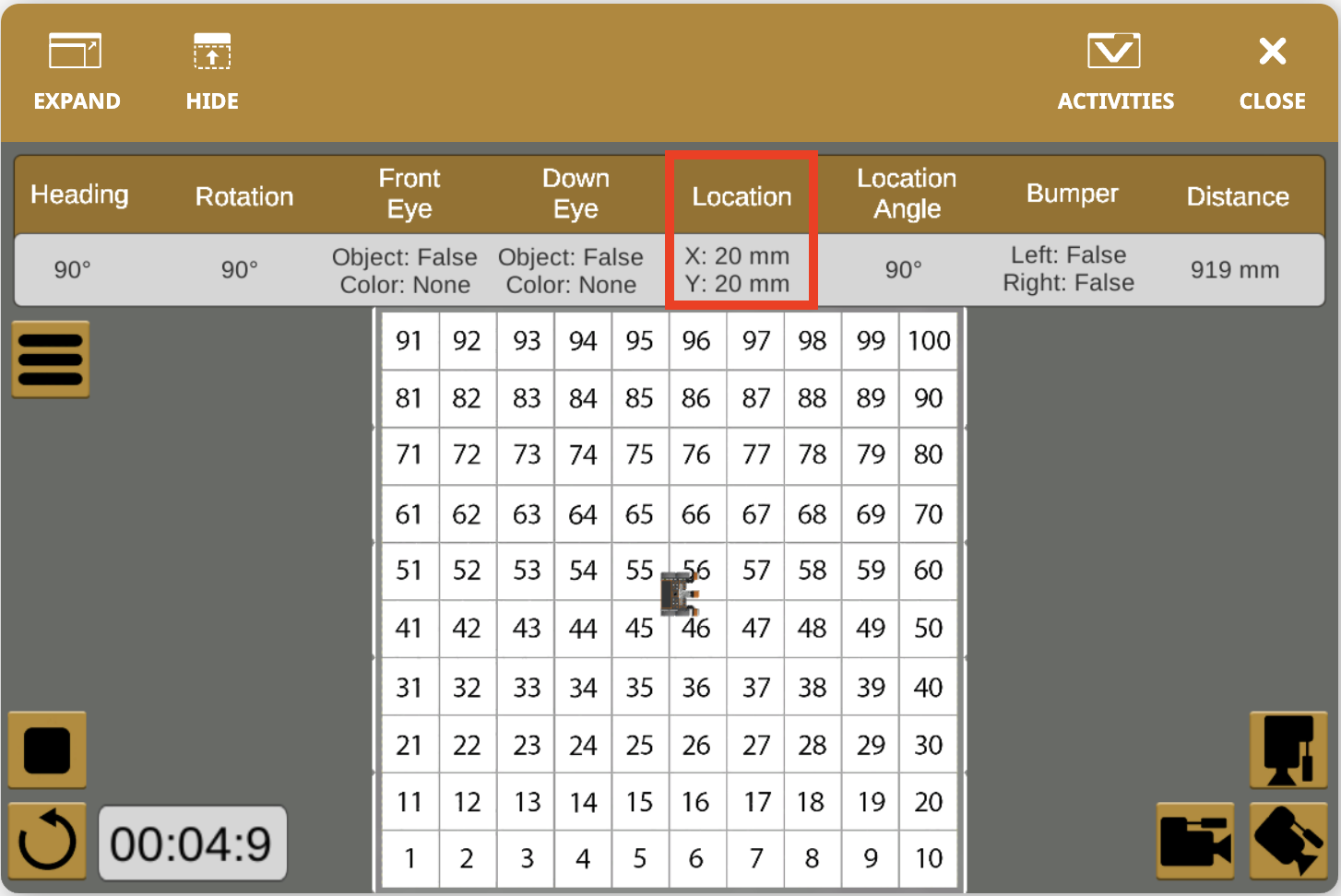
يحتوي روبوت الواقع الافتراضي على مستشعر موقع مدمج يبلغ عن الموضع (X،Y) لروبوت الواقع الافتراضي. يتم تحديد موقع روبوت الواقع الافتراضي من خلال نقطة تحول المركز الأمامي. هذا هو أيضًا موقع القلم على روبوت الواقع الافتراضي.

يمكن رؤية قيم مستشعر الموقع على لوحة المعلومات في VEXcode VR. قم بالاطلاع على المقالة مستشعر الموقع - ميزات الروبوت - VEXcode VR لمعرفة المزيد عن مستشعر الموقع وكيفية استخدامه في مشاريع VEXcode VR.
الإحداثيات في ملاعب الواقع الافتراضي
تتراوح معظم الملاعب من -1000 ملليمتر (مم) إلى 1000 ملليمتر (مم) للموضعين X و Y.

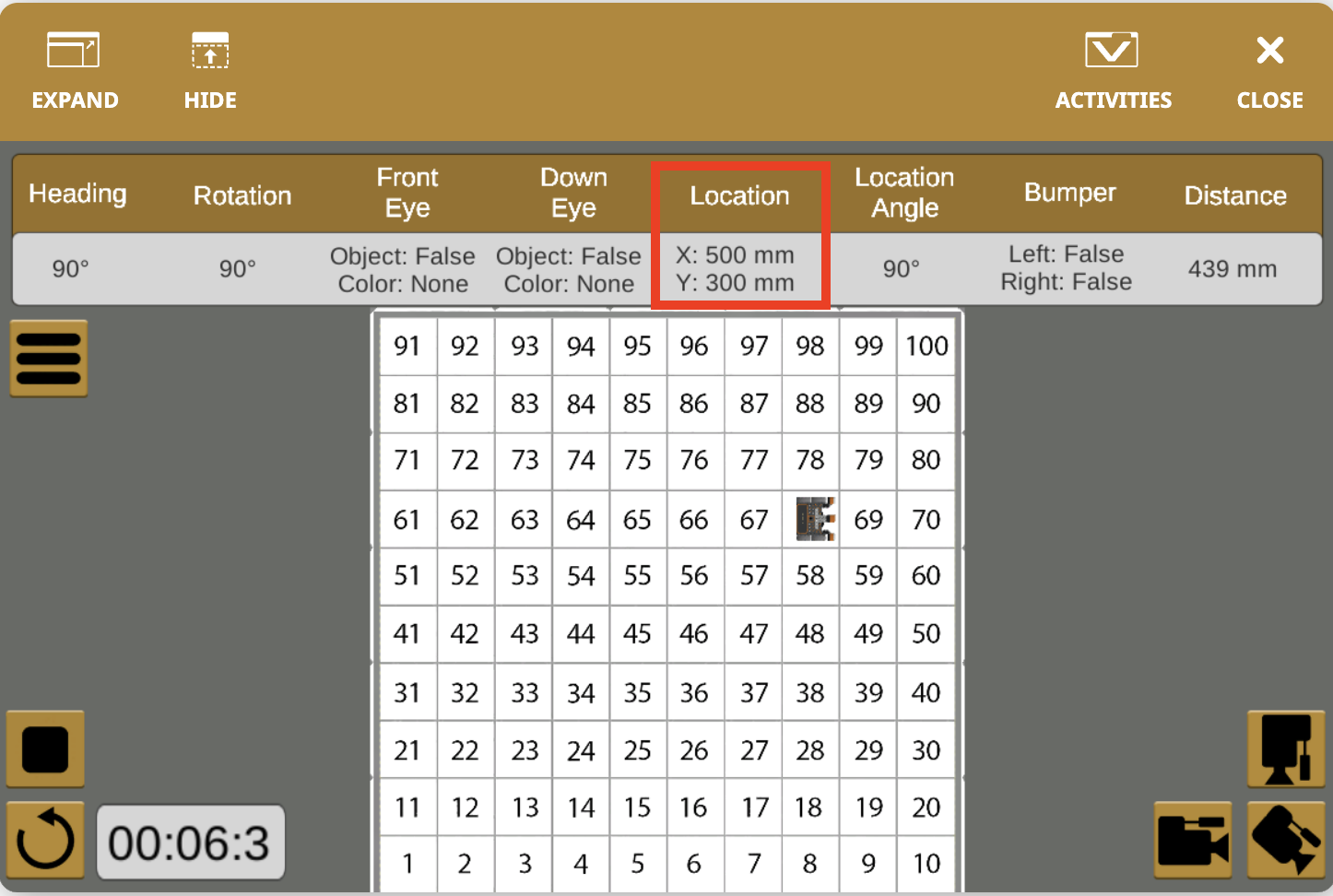
تعرض لوحة معلومات VEXcode VR الموضع (X،Y) لروبوت VR المحدد من مستشعر الموقع.
عرض المقالة التالية للحصول على معلومات حول كيفية تحديد الإحداثيات (X،Y) في الملعب، وكيفية تحديد إحداثيات الموقع والزاوية الحاليين لروبوت الواقع الافتراضي.
لمزيد من المعلومات حول كيفية استخدام نظام الإحداثيات (X،Y)، وكتل الموضع في VEXcode VR، راجع المقالة التالية.
تطبيق
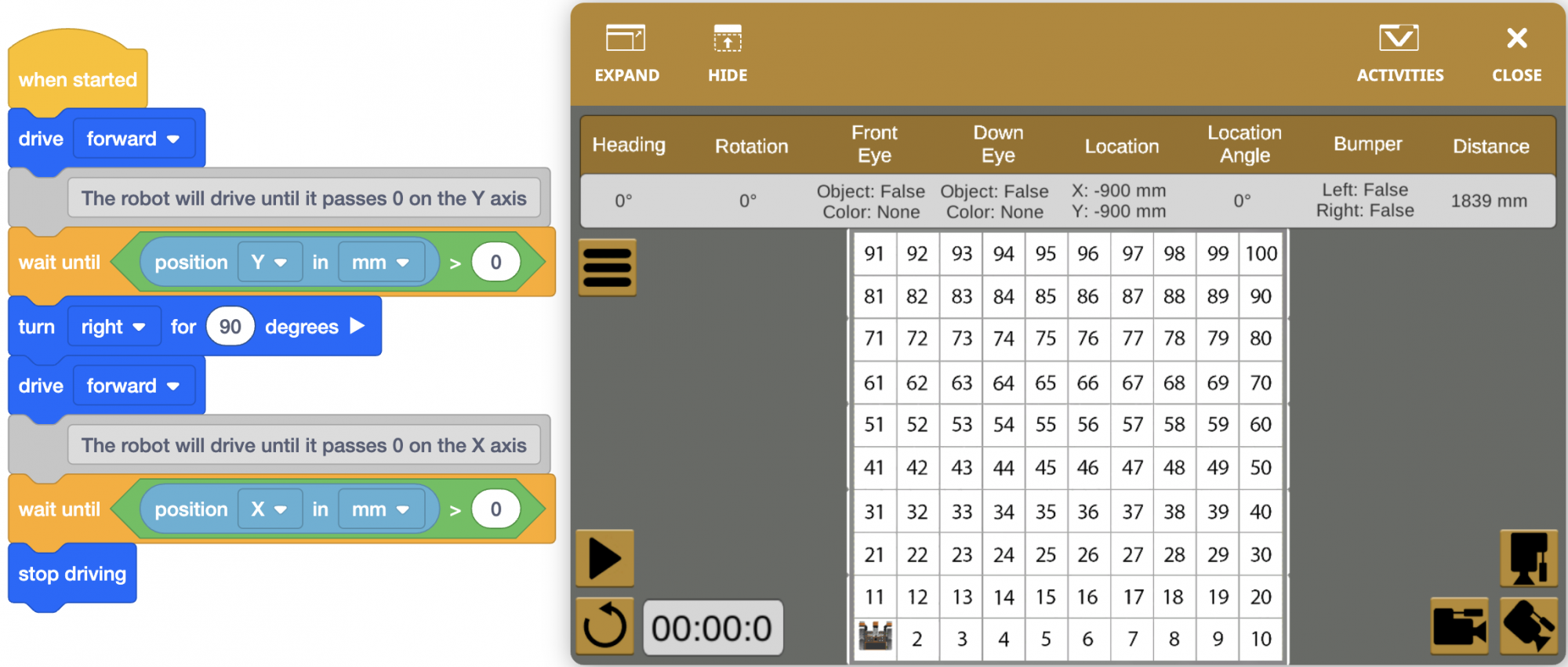
يمكن استخدام مستشعر الموقع للتنقل في إحداثيات أي ملعب. قم بتحميل وتشغيل مشروع مثال "الموقع" لمعرفة كيفية التنقل في روبوت الواقع الافتراضي مع ملاحظات من مستشعر الموقع.
- اختر "فتح الأمثلة" من القائمة المنسدلة "ملف".
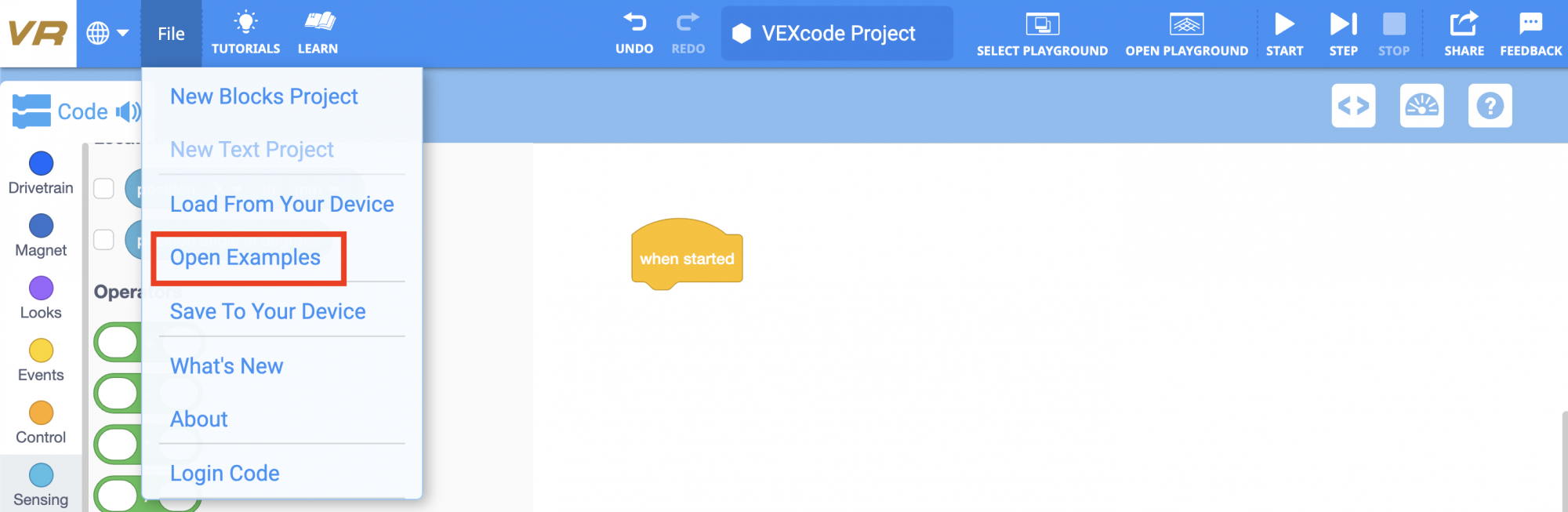
- حدد مشروع مثال "الموقع".
- حدد ملعب خريطة شبكة الأرقام إذا لم يكن مفتوحًا بالفعل، وقم بتشغيل المشروع.
-
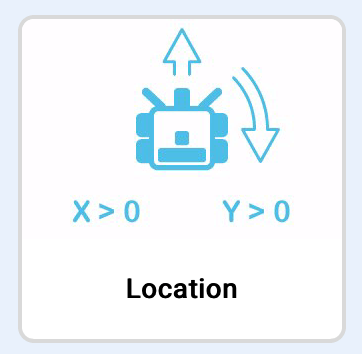
لاحظ أن روبوت الواقع الافتراضي يقود حتى يكون الإحداثي Y أكبر من الصفر، ويدور يمينًا، ثم يقود حتى يكون الإحداثي X أكبر من الصفر. هذا يضع روبوت الواقع الافتراضي بالقرب من مركز ملعب خريطة شبكة الأرقام، بالقرب من الموقع (0، 0).