
Lektion 1: Positionssensor
In dieser Lektion erfahren Sie, was der Positionssensor ist und wie Sie den Positionssensor verwenden, um den VR-Roboter auf der Koordinatenebene auf dem Number Grid Map Playground zu navigieren. Sie erfahren, wie der Positionssensor funktioniert und wie Sie den Positionssensor in einem VEXcode VR-Projekt verwenden.
Lernergebnisse
- Stellen Sie sicher, dass der Positionssensor (X,Y) -Koordinaten vom zentralen Wendepunkt eines VR-Roboters abliest.
- Stellen Sie fest, dass der (Position des Roboters) -Block die X- oder Y-Koordinatenposition eines VR-Roboters entweder in Millimetern oder Zoll meldet.
- Beschreiben Sie, warum der Positionssensor in einem VEXcode VR-Projekt verwendet wird.
- Identifizieren Sie, wie Sie ein Projekt erstellen, das einen VR-Roboterantrieb entlang der X-Achse aufweist, bis der Wert des Positionssensors größer als ein Schwellenwert ist.
- Erklären Sie, wie sich die Koordinatenwerte ändern, wenn ein VR-Roboter fährt (z. B. wenn ein VR-Roboter direkt auf dem Spielplatz fährt, erhöht sich der X-Wert).
Positionssensor
Ein VR-Roboter verfügt über einen eingebauten Positionssensor, der die (X,Y) -Position des VR-Roboters meldet. Die Position des VR-Roboters wird durch den Wendepunkt vorne in der Mitte bestimmt. Dies ist auch die Position des Stiftes auf dem VR-Roboter.

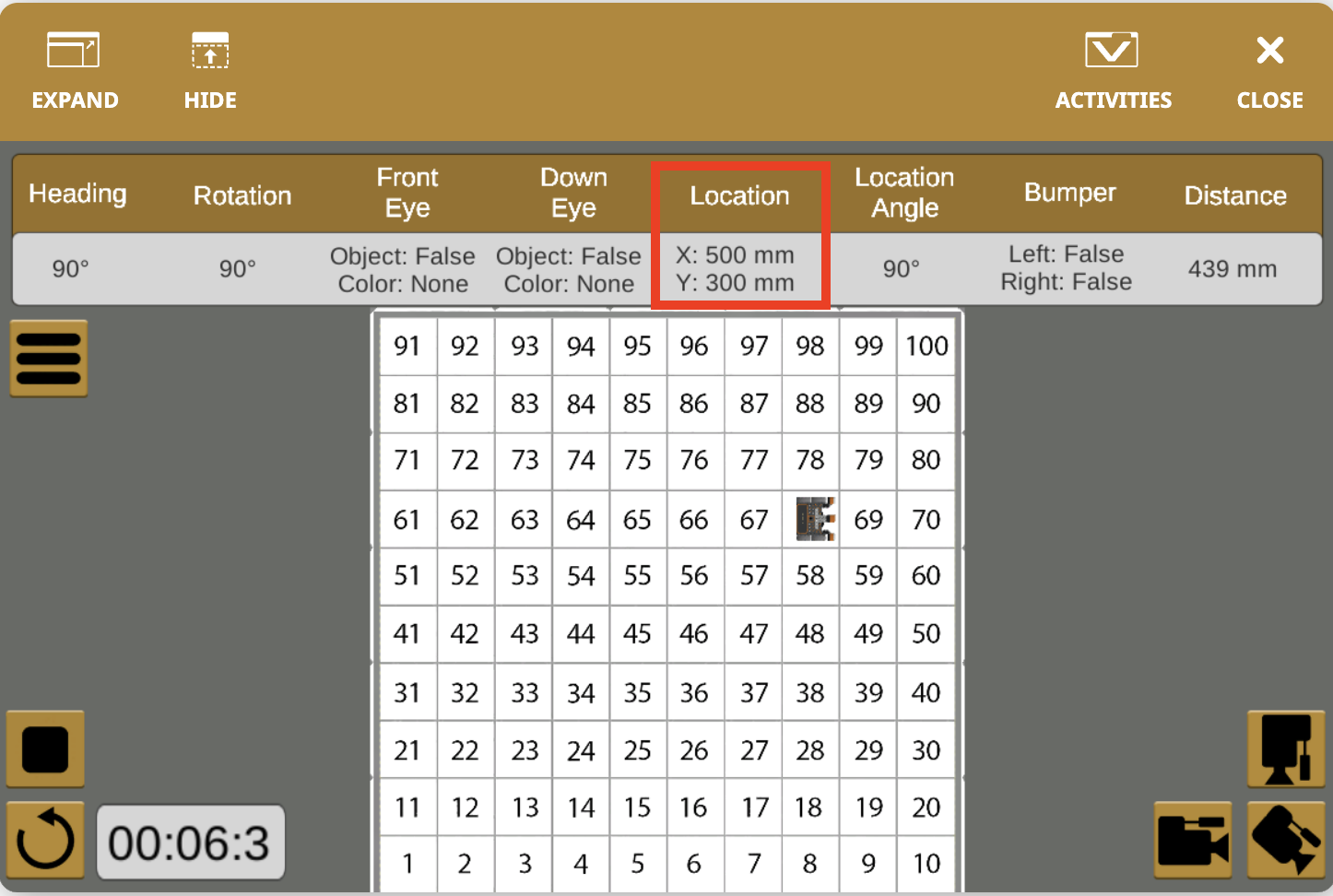
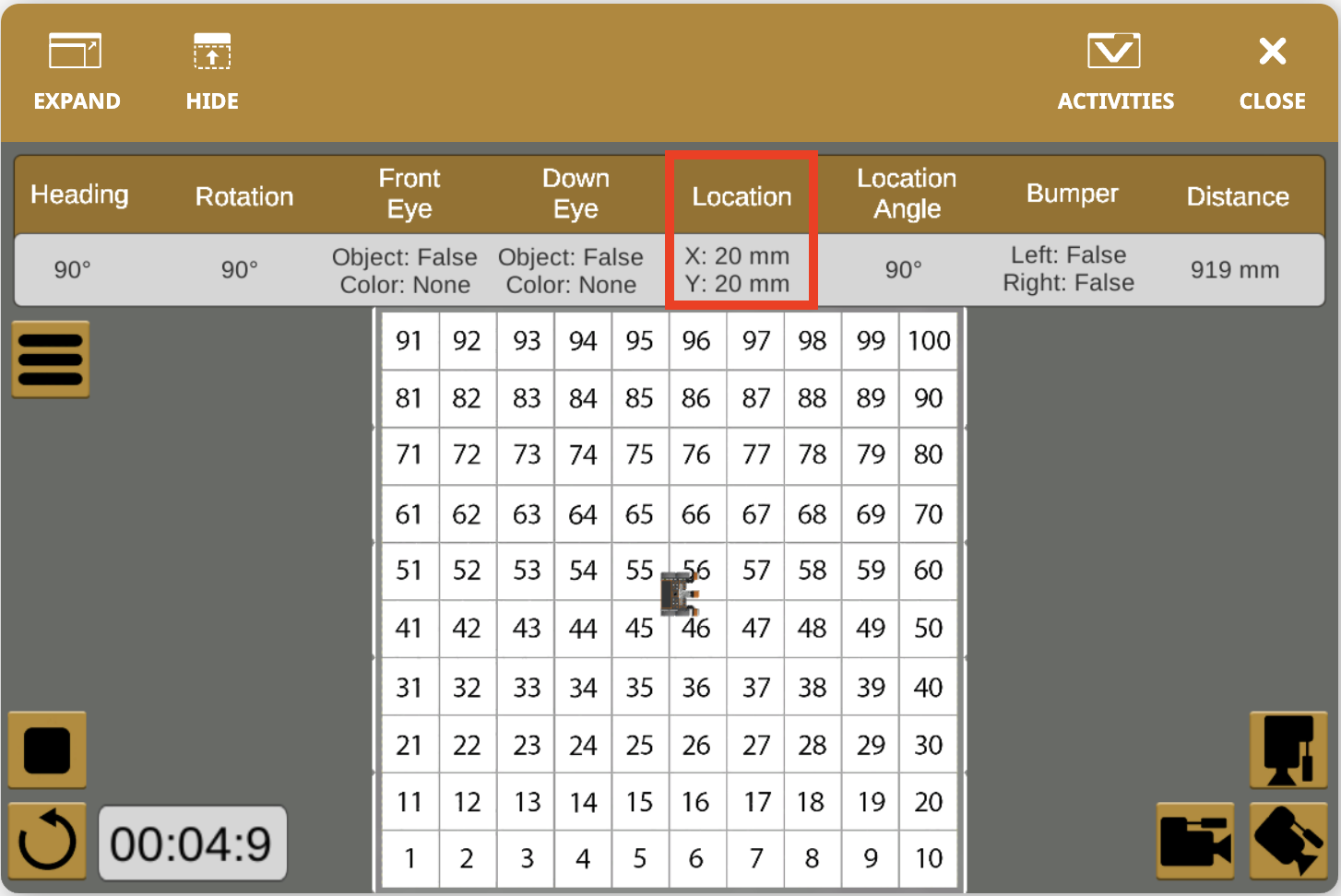
Die Werte des Positionssensors sind auf dem Dashboard in VEXcode VR zu sehen. Sehen Sie sich den Artikel Positionssensor - Roboterfunktionen - VEXcode VR an, um mehr über den Positionssensor und die Verwendung des Positionssensors in VEXcode VR-Projekten zu erfahren.
Koordinaten in VR-Spielplätzen
Die meisten Spielplätze reichen von -1000 Millimeter (mm) bis 1000 Millimeter (mm) für die X- und Y-Positionen.

Das VEXcode VR-Dashboard zeigt die (X,Y) -Position eines VR-Roboters an, die vom Positionssensor ermittelt wurde.
Im folgenden Artikel finden Sie Informationen zum Identifizieren der (X-,Y-) Koordinaten auf einem Spielplatz und zum Identifizieren der Koordinaten des aktuellen Standorts und Winkels eines VR-Roboters.
Weitere Informationen zur Verwendung des Koordinatensystems (X,Y) und der Positionsblöcke in VEXcode VR finden Sie im folgenden Artikel.
Anwenden
Der Positionssensor kann verwendet werden, um die Koordinaten eines beliebigen Spielplatzes zu navigieren. Laden und führen Sie das Beispielprojekt "Standort" aus, um zu sehen, wie Sie mit dem Feedback des Standortsensors durch den VR-Roboter navigieren können.
- Wählen Sie "Beispiele öffnen" aus dem Dropdown-Menü Datei.
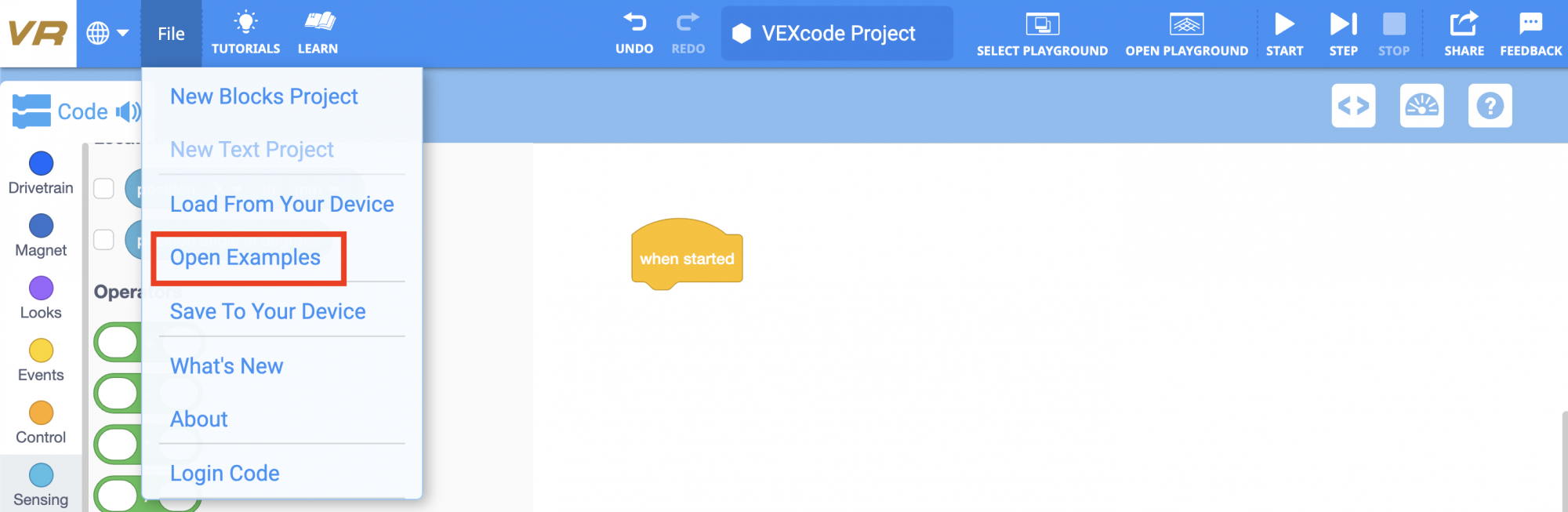
- Wählen Sie das Beispielprojekt „Standort“ aus.
- Wählen Sie den Number Grid Map Playground aus , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
-
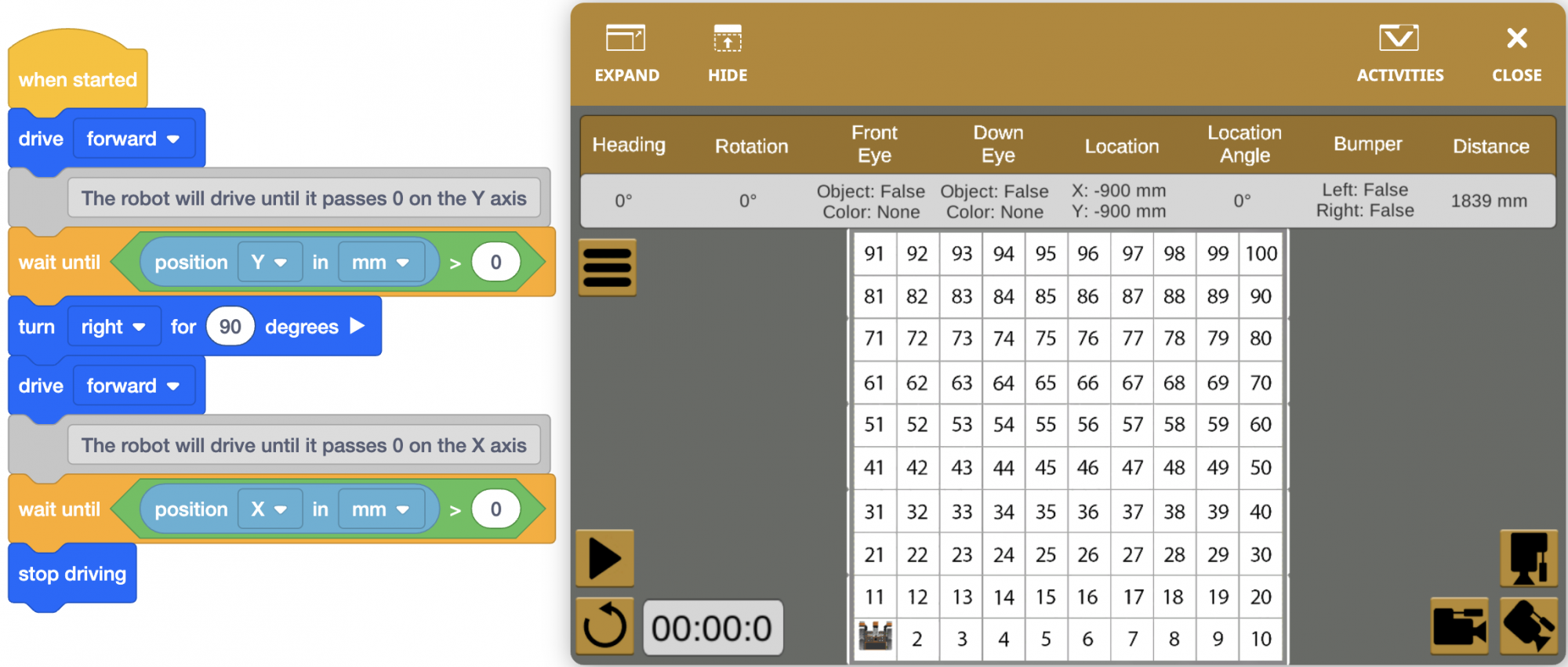
Beachten Sie, dass der VR-Roboter fährt, bis die Y-Koordinate größer als Null ist, nach rechts abbiegt und dann fährt, bis die X-Koordinate größer als Null ist. Dadurch wird der VR-Roboter in der Nähe der Mitte des Number Grid Map Playground in derNähe der Position (0, 0) platziert.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf