पाठ 1: स्थान सेंसर
इस पाठ में, आप सीखेंगे कि स्थान सेंसर क्या है और नंबर ग्रिड मैप प्लेग्राउंडपर समन्वय विमान पर वीआर रोबोट को नेविगेट करने के लिए स्थान सेंसर का उपयोग कैसे करें। आप सीखेंगे कि लोकेशन सेंसर कैसे काम करता है और VEXcode VR प्रोजेक्ट में लोकेशन सेंसर का उपयोग कैसे किया जाता है।
सीखने के परिणाम
- पहचानें कि स्थान सेंसर VR रोबोट के केंद्र मोड़ बिंदु से (X,Y) निर्देशांक पढ़ता है।
- पहचानें कि (रोबोट की स्थिति) ब्लॉक वीआर रोबोट की एक्स या वाई निर्देशांक स्थिति को मिलीमीटर या इंच में रिपोर्ट करता है।
- वर्णन करें कि VEXcode VR परियोजना में स्थान सेंसर का उपयोग क्यों किया जाएगा।
- पहचानें कि एक ऐसा प्रोजेक्ट कैसे बनाया जाए जिसमें VR रोबोट X अक्ष के साथ तब तक चलता रहे जब तक कि लोकेशन सेंसर का मान एक सीमा मान से अधिक न हो जाए।
- बताएं कि VR रोबोट के ड्राइव करने पर निर्देशांक मान किस प्रकार बदलते हैं (उदाहरण के लिए, जब VR रोबोट खेल के मैदान पर ड्राइव करता है, तो X मान बढ़ जाता है)।
स्थान सेंसर
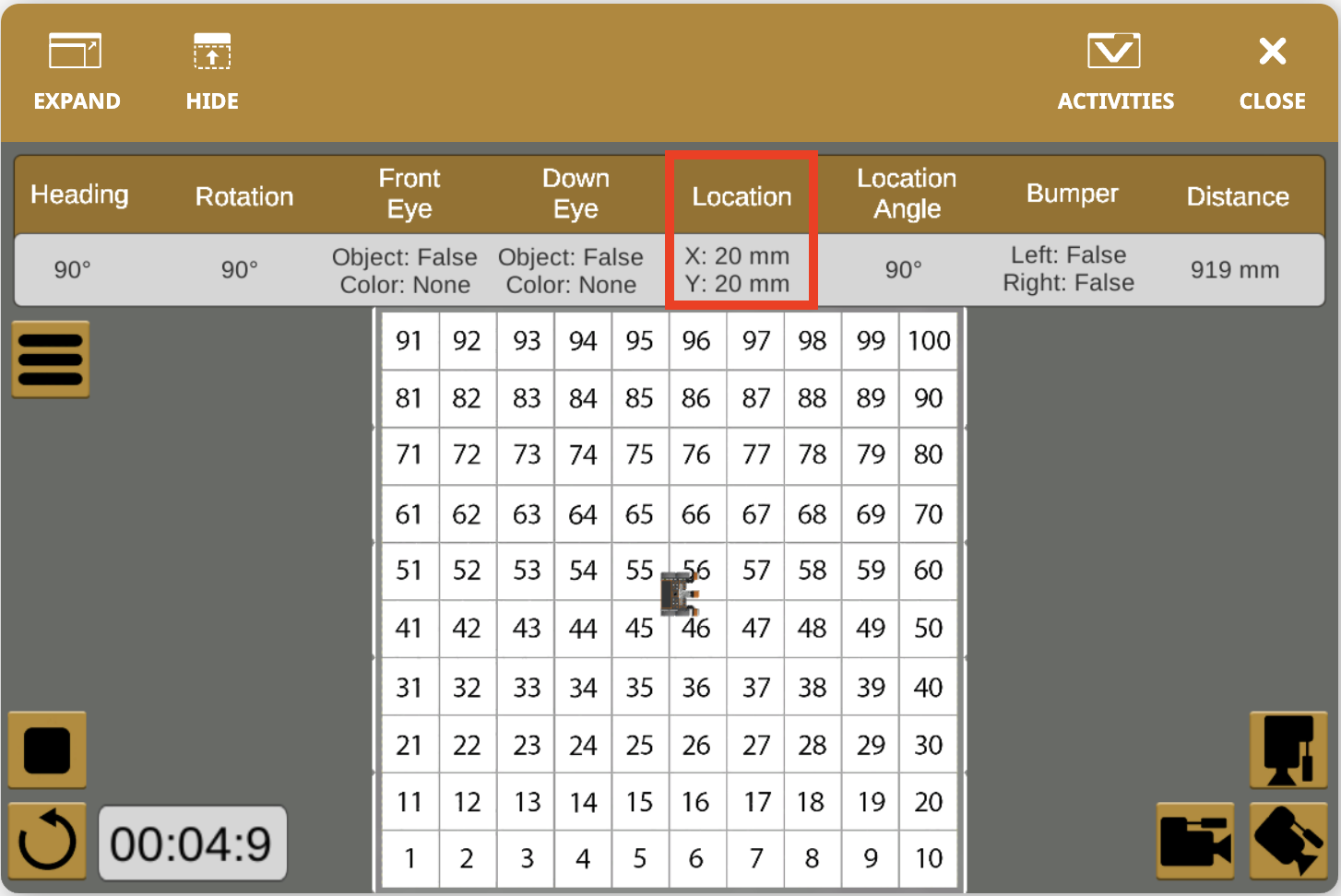
वीआर रोबोट में एक स्थान सेंसर लगा होता है जो वीआर रोबोट की (X,Y) स्थिति की रिपोर्ट करता है। वी.आर. रोबोट का स्थान सामने के मध्य मोड़ बिंदु द्वारा निर्धारित किया जाता है। यह वी.आर. रोबोट पर पेन का स्थान भी है।

स्थान सेंसर मान VEXcode VR में डैशबोर्ड पर देखे जा सकते हैं। स्थान सेंसर के बारे में अधिक जानने के लिए, तथा VEXcode VR परियोजनाओं में स्थान सेंसर का उपयोग कैसे करें, यह जानने के लिए स्थान सेंसर - रोबोट विशेषताएँ - VEXcode VR लेख देखें।
VR खेल के मैदानों में निर्देशांक
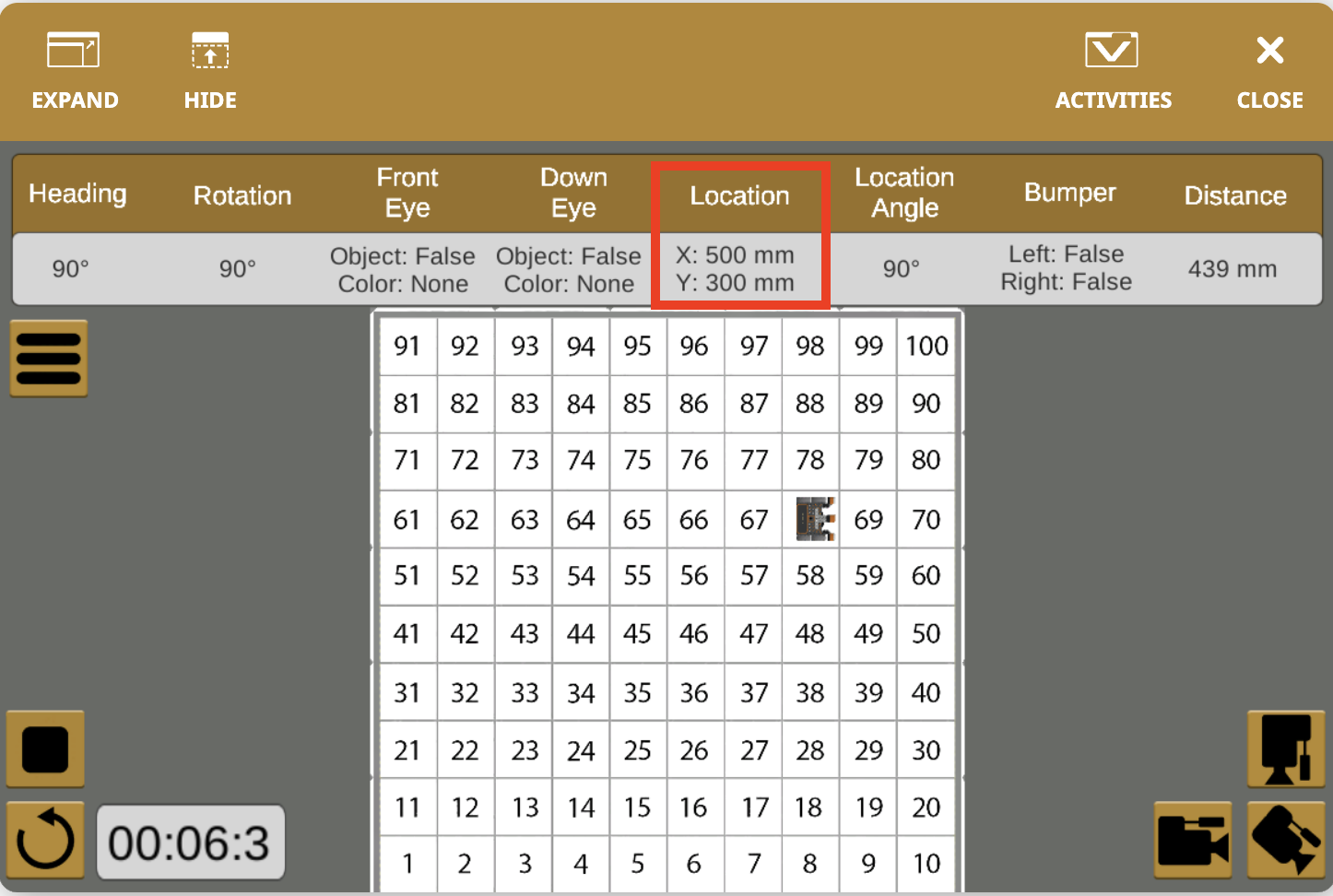
अधिकांश प्लेग्राउंड की रेंज X और Y स्थिति के लिए -1000 मिलीमीटर (मिमी) से लेकर 1000 मिलीमीटर (मिमी) तक होती है।

VEXcode VR डैशबोर्ड, लोकेशन सेंसर से निर्धारित VR रोबोट की (X,Y) स्थिति प्रदर्शित करता है।
खेल के मैदान पर (X,Y) निर्देशांक की पहचान कैसे करें, तथा VR रोबोट के वर्तमान स्थान और कोण के निर्देशांक की पहचान कैसे करें, इसकी जानकारी के लिए निम्नलिखित लेख देखें।
निर्देशांक प्रणाली (X,Y) का उपयोग कैसे करें, तथा VEXcode VR में ब्लॉकों की स्थिति कैसे निर्धारित करें, इस बारे में अधिक जानकारी के लिए, निम्नलिखित लेख देखें।
आवेदन करना
स्थान सेंसर का उपयोग किसी भी खेल के मैदान के निर्देशांक को नेविगेट करने के लिए किया जा सकता है। लोकेशन सेंसर से फीडबैक के साथ वीआर रोबोट को कैसे नेविगेट किया जाए, यह देखने के लिए "लोकेशन" उदाहरण प्रोजेक्ट को लोड करें और चलाएं।
- फ़ाइल ड्रॉपडाउन मेनू से “ओपन उदाहरण” चुनें।
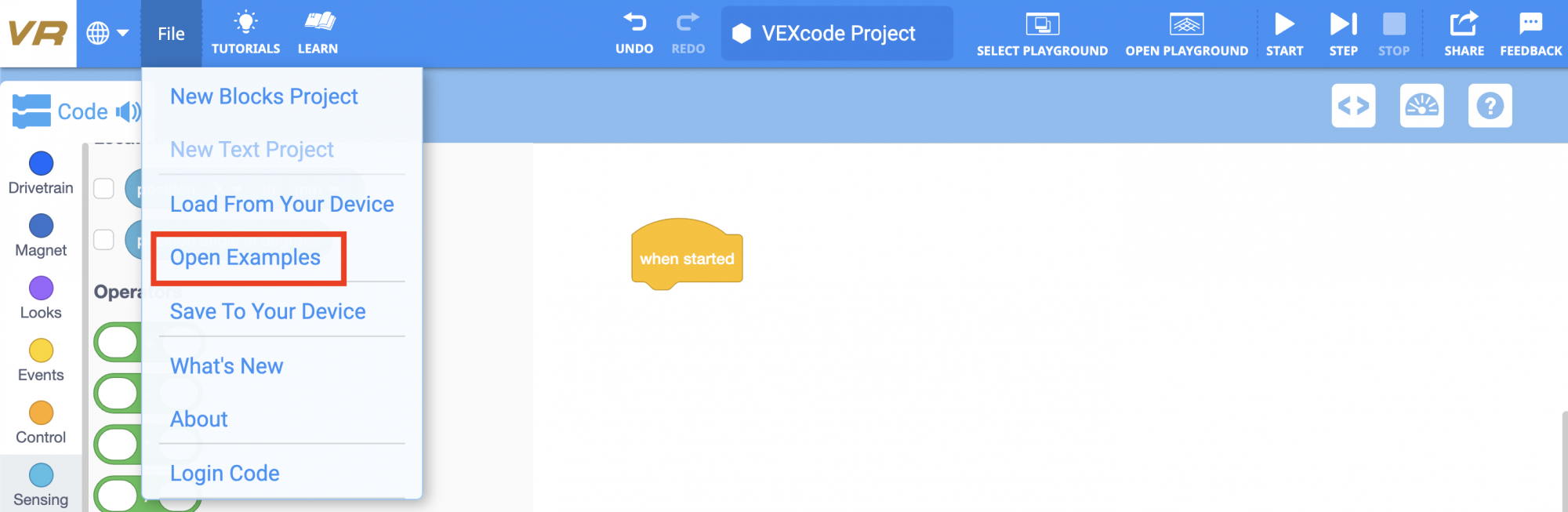
- “स्थान” उदाहरण प्रोजेक्ट का चयन करें.
- यदि नंबर ग्रिड मैप प्लेग्राउंड पहले से खुला नहीं है तो उसे चुनें और प्रोजेक्ट चलाएं।
-
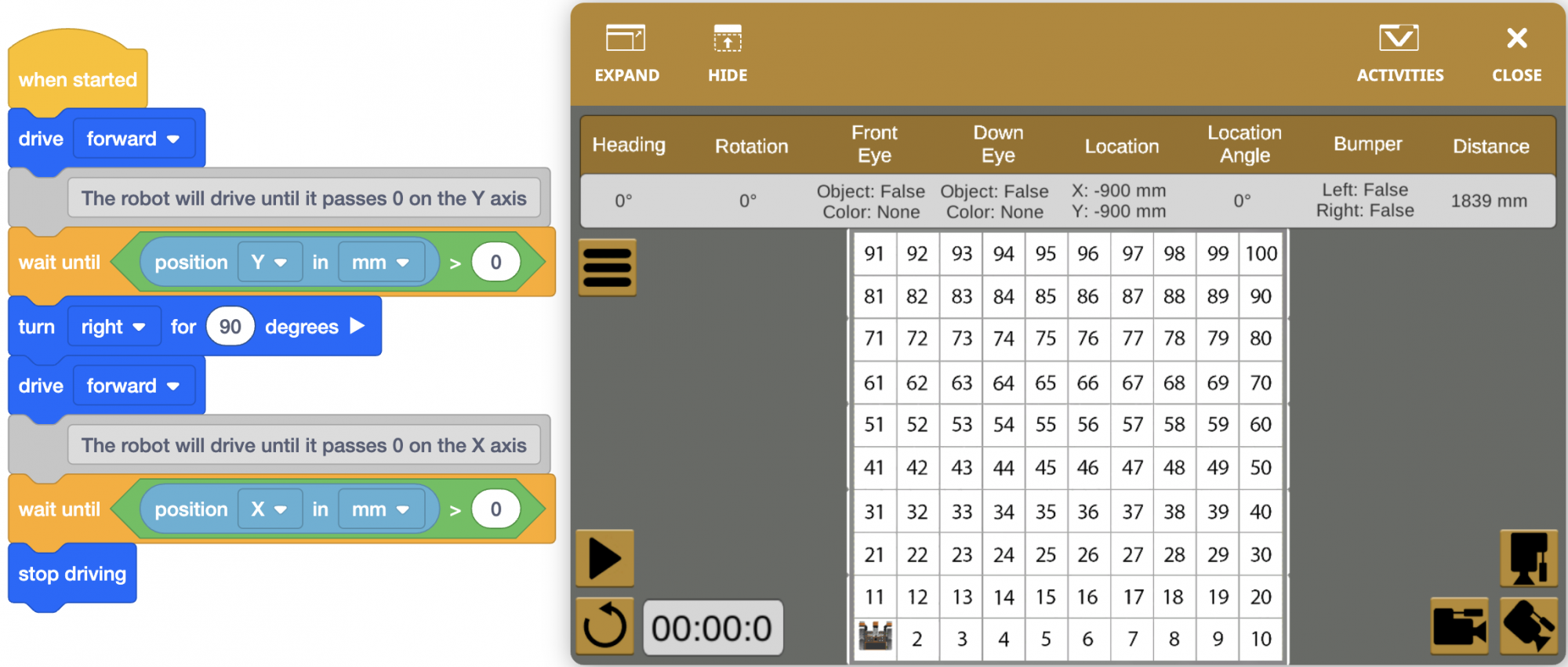
ध्यान दें कि वीआर रोबोट तब तक चलता है जब तक कि Y निर्देशांक शून्य से अधिक न हो जाए, फिर दाईं ओर मुड़ता है, फिर तब तक चलता है जब तक कि X निर्देशांक शून्य से अधिक न हो जाए। यह वीआर रोबोट को नंबर ग्रिड मैप प्लेग्राउंडके केंद्र के करीब, स्थान (0, 0) के पास रखता है।