레슨 1: 위치 센서
이 수업에서는 위치 센서가 무엇인지, 그리고 위치 센서를 사용하여 번 그리드 맵 놀이터의 좌표 평면에서 VR 로봇을 탐색하는 방법을 알아봅니다. 위치 센서가 작동하는 방식과 VEXcode VR 프로젝트에서 위치 센서를 사용하는 방법을 알아봅니다.
학습 성과
- 위치 센서가 VR 로봇의 중심 회전점으로부터 (X,Y) 좌표를 읽는다는 것을 확인합니다.
- (로봇 위치) 블록이 VR 로봇의 X 또는 Y 좌표 위치를 밀리미터 또는 인치 단위로 보고한다는 것을 식별합니다.
- VEXcode VR 프로젝트에서 위치 센서를 사용하는 이유를 설명하세요.
- 위치 센서의 값이 임계값보다 커질 때까지 X축을 따라 VR 로봇이 구동되는 프로젝트를 만드는 방법을 식별합니다.
- VR 로봇이 주행할 때 좌표 값이 어떻게 변하는지 설명하세요(예: VR 로봇이 놀이터 바로 위를 주행할 경우 X 값이 증가합니다).
위치 센서
VR 로봇에는 VR 로봇의 (X, Y) 위치를 보고하는 위치 센서가 내장되어 있습니다. VR 로봇의 위치는 전면 중앙의 회전 지점에 따라 결정됩니다. VR 로봇의 펜 위치도 여기에 있습니다.

위치 센서 값은 VEXcode VR의 대시보드에서 확인할 수 있습니다. 위치 센서에 대해 자세히 알아보고 VEXcode VR 프로젝트에서 위치 센서를 사용하는 방법을 알아보려면 위치 센서 - 로봇 기능 - VEXcode VR 문서를 참조하세요.
VR 놀이터의 좌표
대부분의 Playground는 X 및 Y 위치의 경우 -1000밀리미터(mm)에서 1000밀리미터(mm)까지입니다.

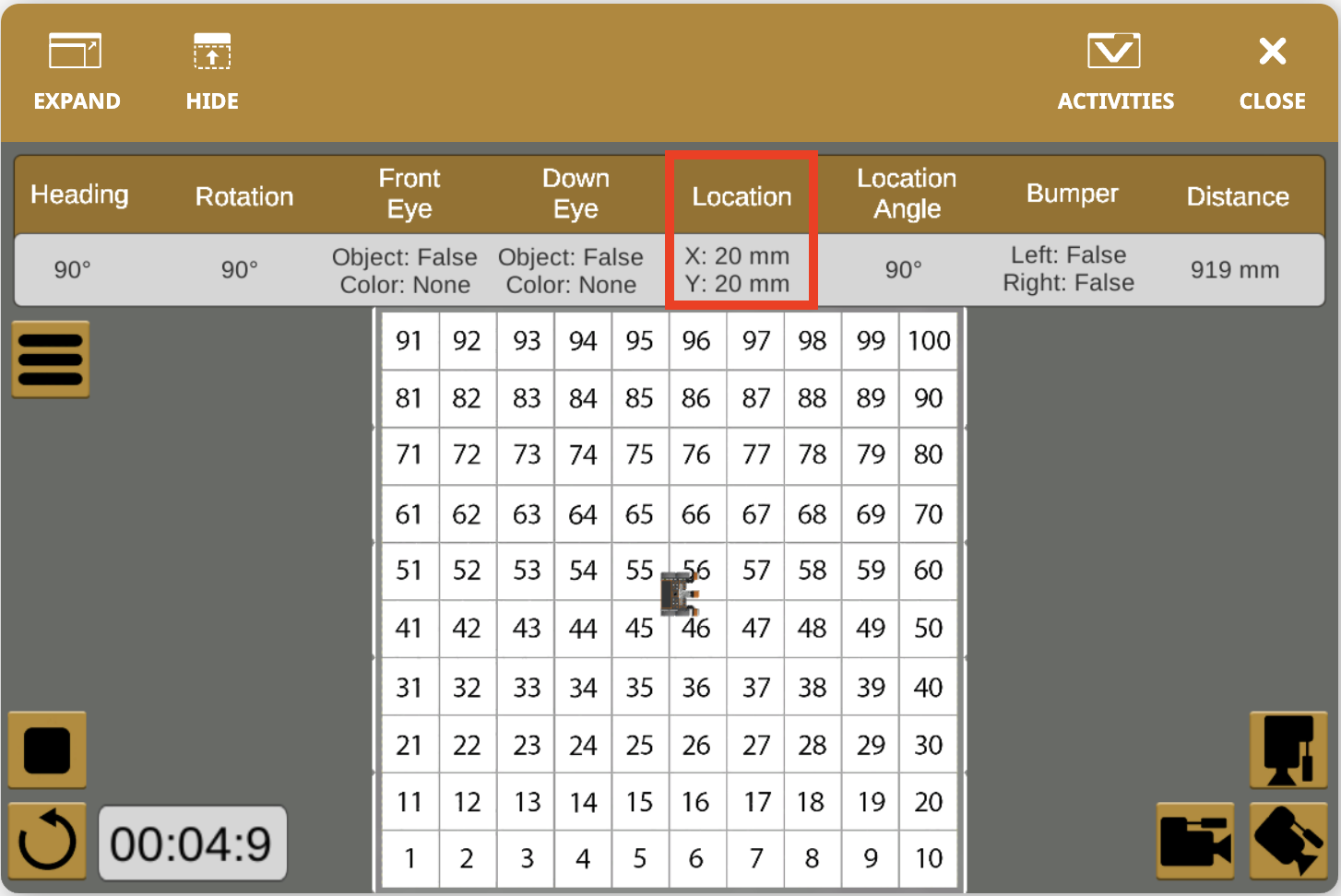
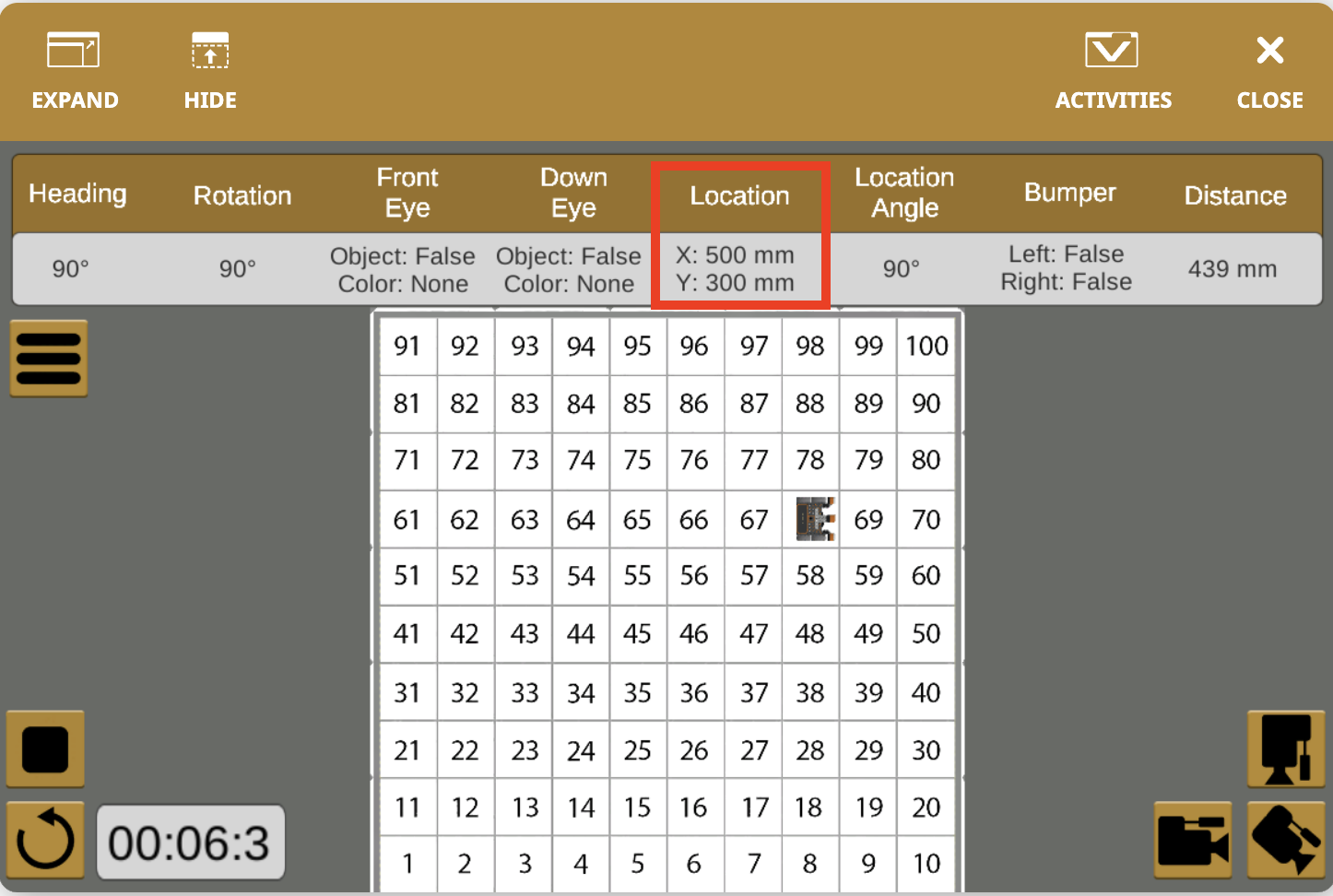
VEXcode VR 대시보드는 위치 센서로부터 확인된 VR 로봇의 (X, Y) 위치를 표시합니다.
놀이터에서 (X, Y) 좌표를 식별하는 방법과 VR 로봇의 현재 위치와 각도의 좌표를 식별하는 방법에 대한 정보는 다음 문서를 참조하세요.
VEXcode VR에서 좌표계(X, Y)를 사용하고 블록을 위치시키는 방법에 대한 자세한 내용은 다음 문서를 참조하세요.
적용하다
위치 센서는 모든 놀이터의 좌표를 탐색하는 데 사용할 수 있습니다. "위치" 예제 프로젝트를 로드하고 실행하여 위치 센서의 피드백을 통해 VR 로봇을 탐색하는 방법을 확인하세요.
- 파일 드롭다운 메뉴에서 "예제 열기"를 선택합니다.
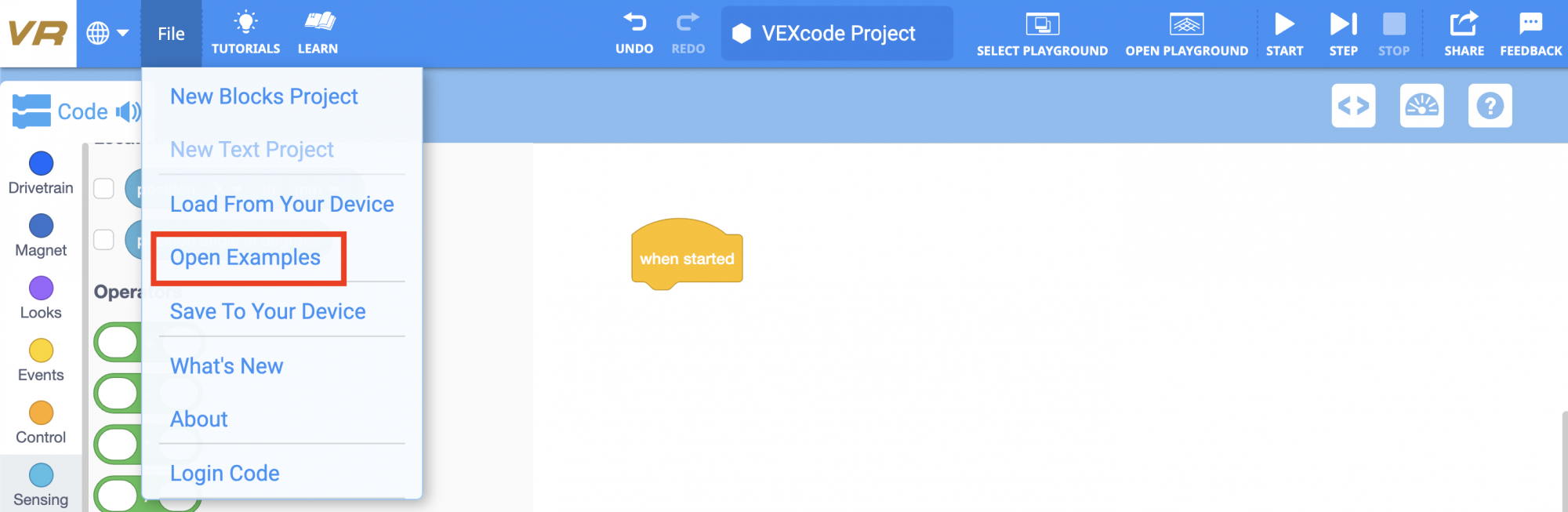
- "위치" 예제 프로젝트를 선택하세요.
- 아직 열려 있지 않으면 번호 그리드 맵 놀이터 을 선택하고 프로젝트를 실행합니다.
-
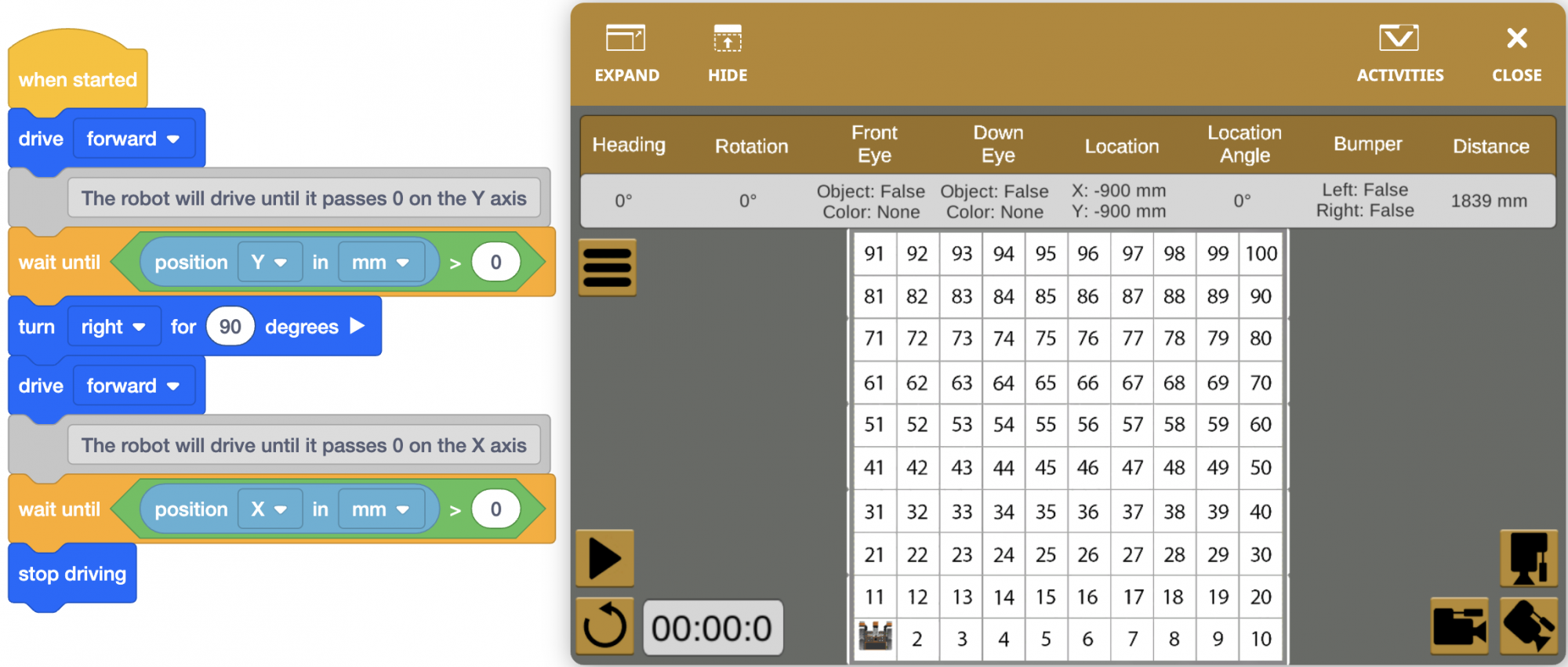
VR 로봇은 Y 좌표가 0보다 커질 때까지 주행하고, 오른쪽으로 회전한 다음 X 좌표가 0보다 커질 때까지 주행합니다. 이렇게 하면 VR 로봇이 숫자 그리드 맵 놀이터의 중앙 근처, 위치 (0, 0)에 배치됩니다.