
Lição 1: Sensor de Localização
Nesta lição, você aprenderá o que é o Sensor de Localização e como usar o Sensor de Localização para navegar no Robô VR no plano de coordenadas no Playground do Mapa de Grade Numérica. Aprenderá como funciona o Sensor de Localização e como usar o Sensor de Localização num projeto VEXcode VR.
Resultados de Aprendizagem
- Identifique se o Sensor de Localização lê as coordenadas (X,Y) a partir do ponto de giro central de um Robô VR.
- Identifique se o bloco (Posição do robô) relata a posição da coordenada X ou Y de um robô VR em milímetros ou polegadas.
- Descreva por que o Sensor de Localização seria usado num projeto VEXcode VR.
- Identifique como criar um projeto que tenha uma unidade de robô VR ao longo do eixo X até que o valor do sensor de localização seja maior que um valor limite.
- Explique como os valores das coordenadas mudam à medida que um robô de RV dirige (por exemplo, à medida que um robô de RV dirige diretamente no playground, o valor X aumenta).
Sensor de Localização
Um Robô VR possui um Sensor de Localização integrado que informa a posição (X,Y) do Robô VR. A localização do Robô VR é determinada pelo ponto de viragem do centro frontal. Esta também é a localização da Caneta no Robô VR.

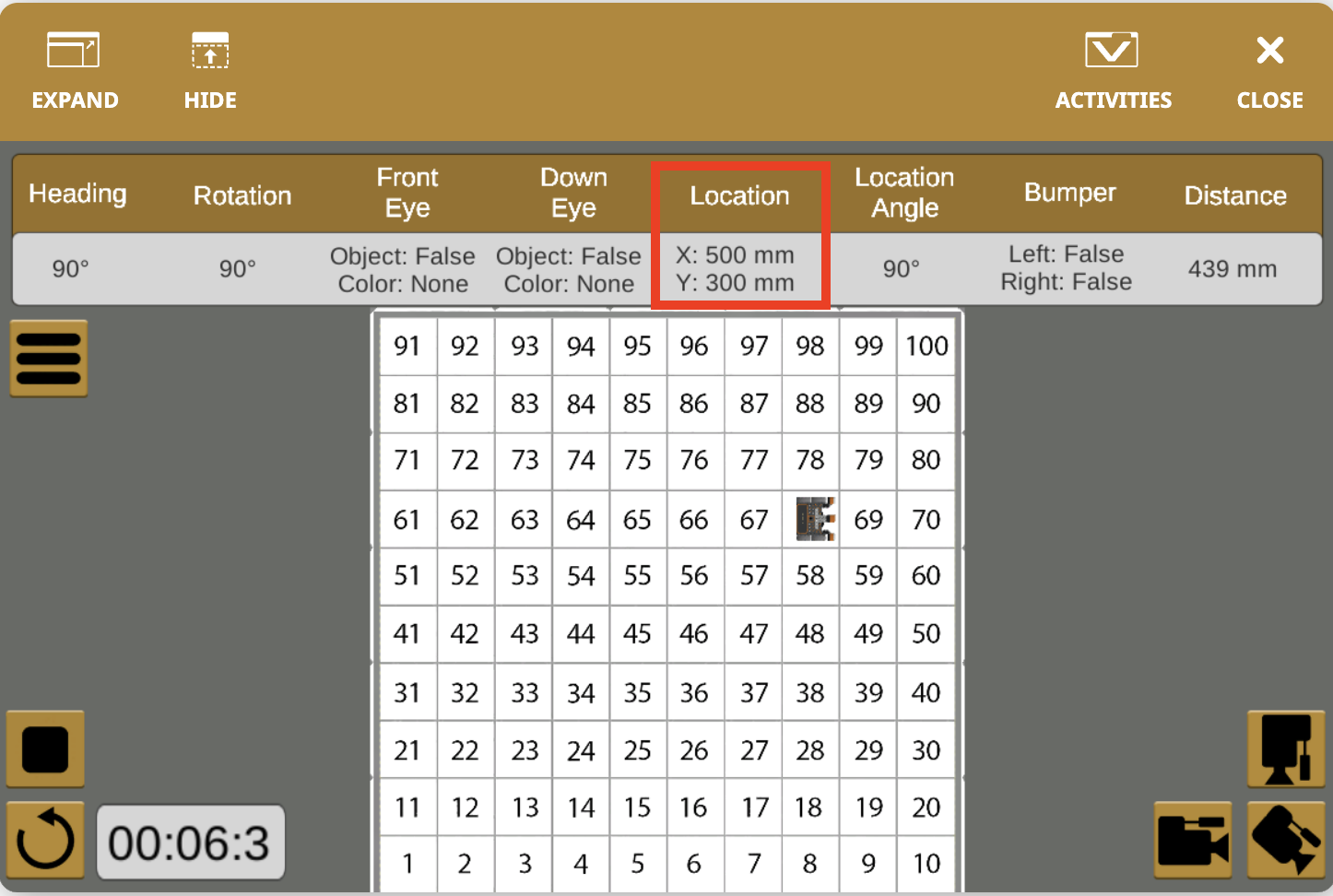
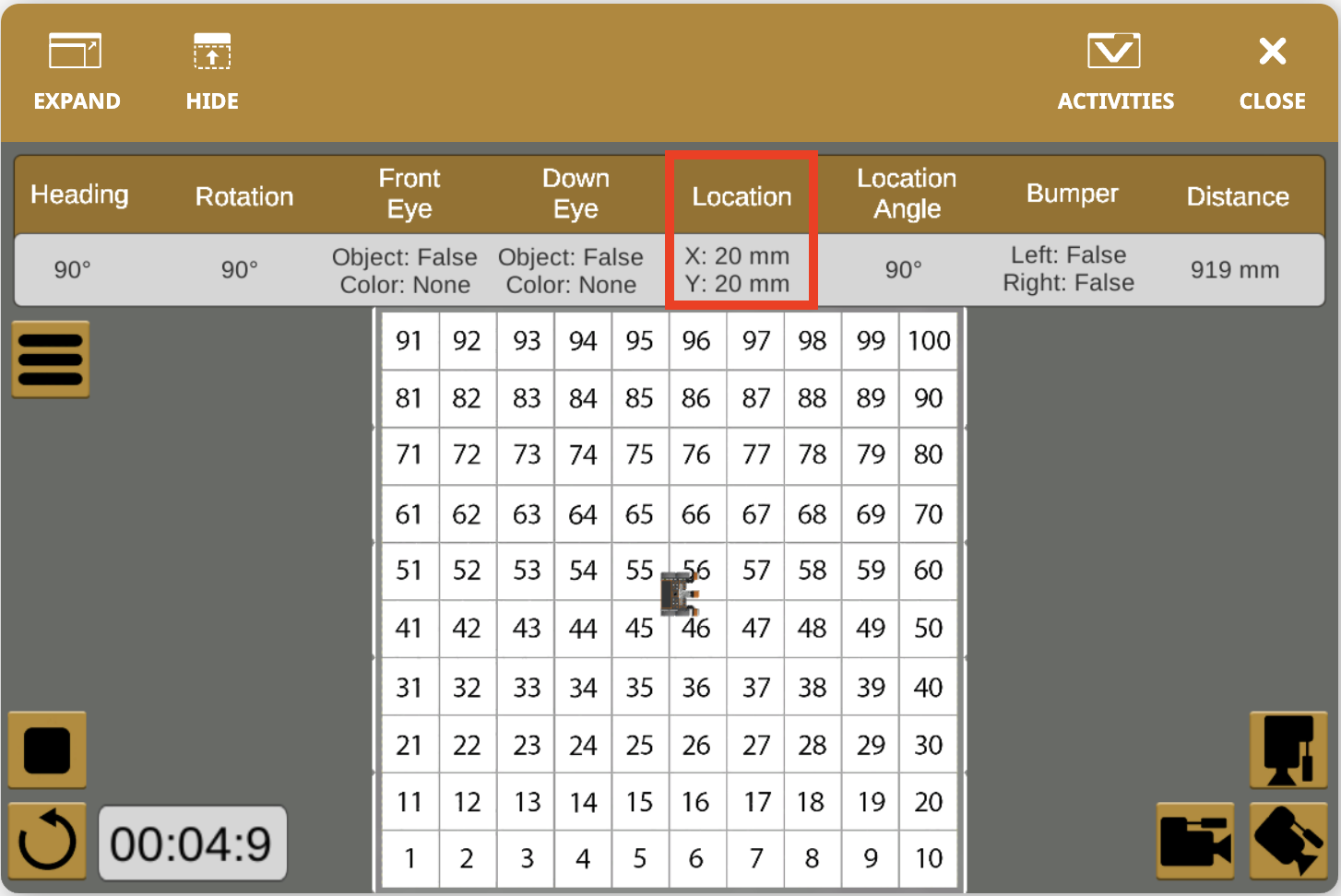
Os valores do Sensor de Localização podem ser vistos no Painel no VEXcode VR. Consulte o artigo Location Sensor - Robot Features - VEXcode VR para saber mais sobre o Location Sensor e como utilizar o Location Sensor em projetos VEXcode VR.
Coordenadas em playgrounds de RV
A maioria dos Playground varia de -1000 milímetros (mm) a 1000 milímetros (mm) para as posições X e Y.

O Painel VEXcode VR exibe a posição (X,Y) de um Robô VR determinada a partir do Sensor de Localização.
Veja o artigo a seguir para obter informações sobre como identificar as coordenadas (X,Y) em um playground e como identificar as coordenadas da localização e do ângulo atuais de um robô de RV.
Para obter mais informações sobre como usar o sistema de coordenadas (X,Y) e blocos de posição no VEXcode VR, consulte o artigo a seguir.
Aplicar
O Sensor de Localização pode ser usado para navegar pelas coordenadas de qualquer Playground. Carregue e execute o projeto de exemplo "Localização" para ver como navegar no Robô VR com feedback do Sensor de Localização.
- Selecione "Abrir Exemplos" no menu suspenso Ficheiro.
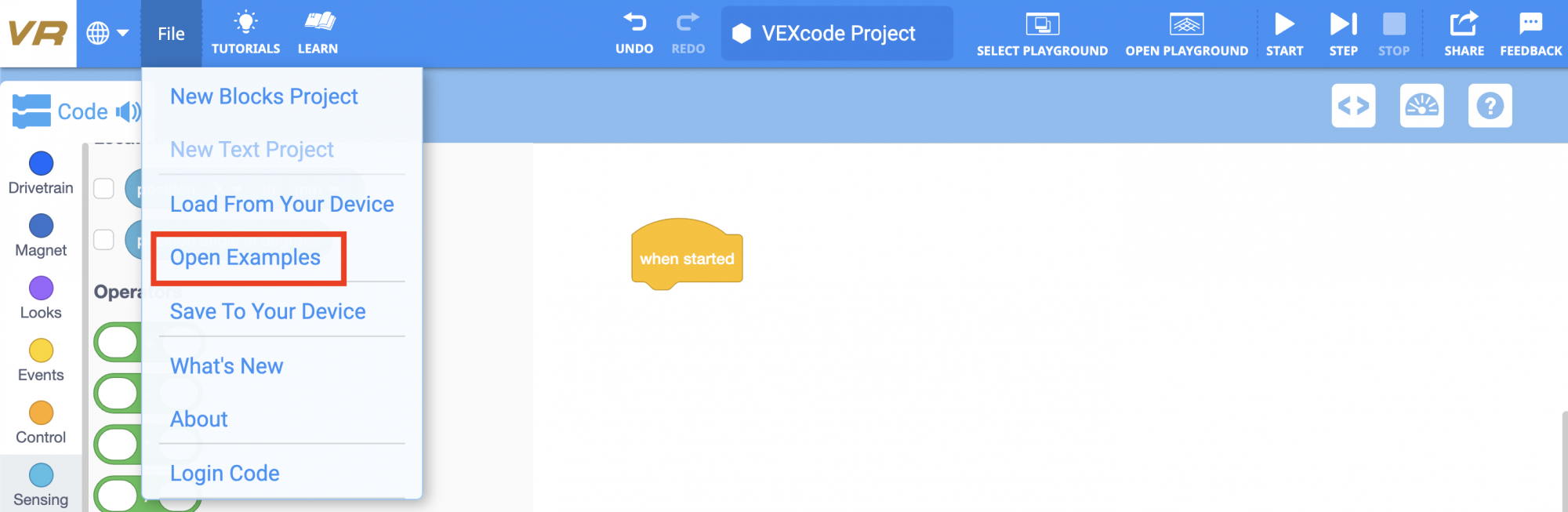
- Seleccione o projecto de exemplo "Localização".
- Selecione o Playground do Mapa de Grade Numérica, se ainda não estiver aberto, e execute o projeto.
-
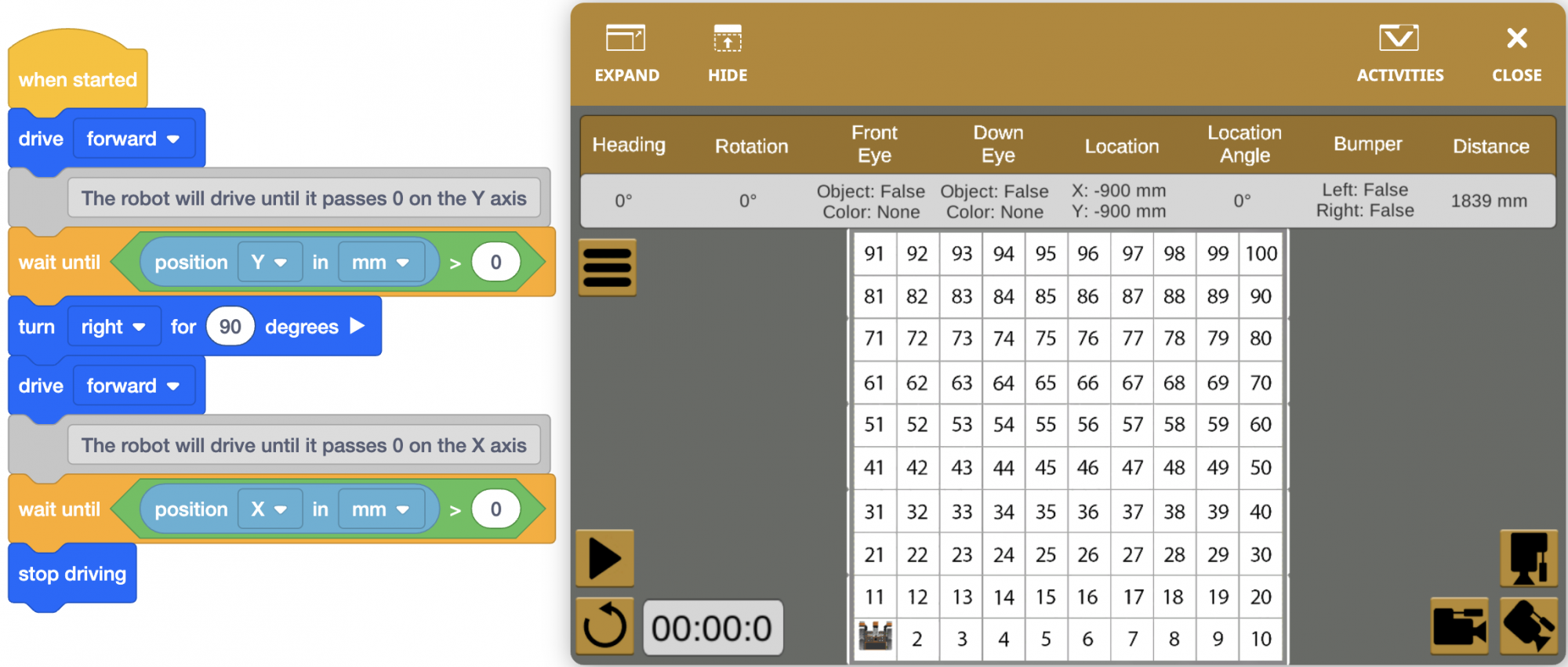
Observe que o robô VR aciona até que a coordenada Y seja maior que zero, vira à direita e, em seguida, aciona até que a coordenada X seja maior que zero. Isso coloca o Robô VR perto do centro do Playground do Mapa de Grade Numérica, perto da localização (0, 0).
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf