บทที่ 1: เซ็นเซอร์ตรวจจับตำแหน่ง
ในบทเรียนนี้คุณจะได้เรียนรู้ว่าเซ็นเซอร์ตำแหน่งคืออะไรและวิธีการใช้เซ็นเซอร์ตำแหน่งเพื่อนำทางหุ่นยนต์ VR บนระนาบพิกัดบนสนามเด็กเล่น Number GridMap คุณจะได้เรียนรู้วิธีการทำงานของเซ็นเซอร์ตำแหน่งและวิธีการใช้เซ็นเซอร์ตำแหน่งในโครงการ VEXcode VR
ผลการเรียนรู้
- ระบุว่าเซ็นเซอร์ตำแหน่งอ่านพิกัด (X, Y) จากจุดเลี้ยว ตรงกลางของหุ่นยนต์ VR
- ระบุว่าบล็อก (ตำแหน่งของหุ่นยนต์) รายงานตำแหน่งพิกัด X หรือ Y ของหุ่นยนต์ VR เป็นมิลลิเมตรหรือนิ้ว
- อธิบายว่าเหตุใดจึงต้องใช้เซ็นเซอร์ตำแหน่งในโครงการ VEXcode VR
- ระบุวิธีการสร้างโครงการที่มีไดรฟ์ VR Robot ตามแกน X จนกว่าค่าของเซ็นเซอร์ตำแหน่งจะมากกว่าค่าเกณฑ์
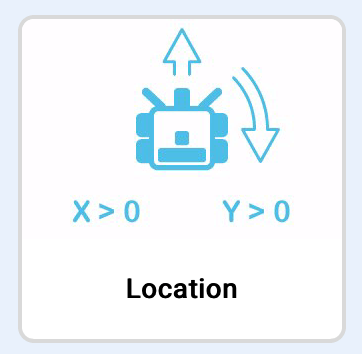
- อธิบายว่าค่าพิกัดเปลี่ยนไปอย่างไรเมื่อ VR Robot ขับเคลื่อน (เช่นเมื่อ VR Robot ขับเคลื่อนบนสนามเด็กเล่นค่า X จะเพิ่มขึ้น)
เซ็นเซอร์ตำแหน่ง
หุ่นยนต์ VR มีเซ็นเซอร์ตรวจจับตำแหน่งในตัวซึ่งจะรายงานตำแหน่ง (X, Y) ของหุ่นยนต์ VR ตำแหน่งของหุ่นยนต์ VR จะถูกกำหนดโดยจุดเลี้ยวด้านหน้า - กลาง นี่ยังเป็นตำแหน่งของปากกาบนหุ่นยนต์ VR อีกด้วย

สามารถดูค่าเซ็นเซอร์ตำแหน่งได้บนแดชบอร์ดใน VEXcode VR ดูเซนเซอร์ตรวจจับ ตำแหน่ง - คุณสมบัติของหุ่นยนต์ - บทความ VEXcode VR เพื่อเรียนรู้เพิ่มเติมเกี่ยวกับเซนเซอร์ตรวจจับตำแหน่งและวิธีใช้เซนเซอร์ตรวจจับตำแหน่งในโครงการ VEXcode VR
พิกัดใน VR Playgrounds
สนามเด็กเล่นส่วนใหญ่มีตั้งแต่ -1000 มิลลิเมตร (มม.) ถึง 1000 มิลลิเมตร (มม.) สำหรับตำแหน่ง X และ Y Most Playground range from -1000 mm (mm) to 1000 mm (mm) for the X and Y positions.

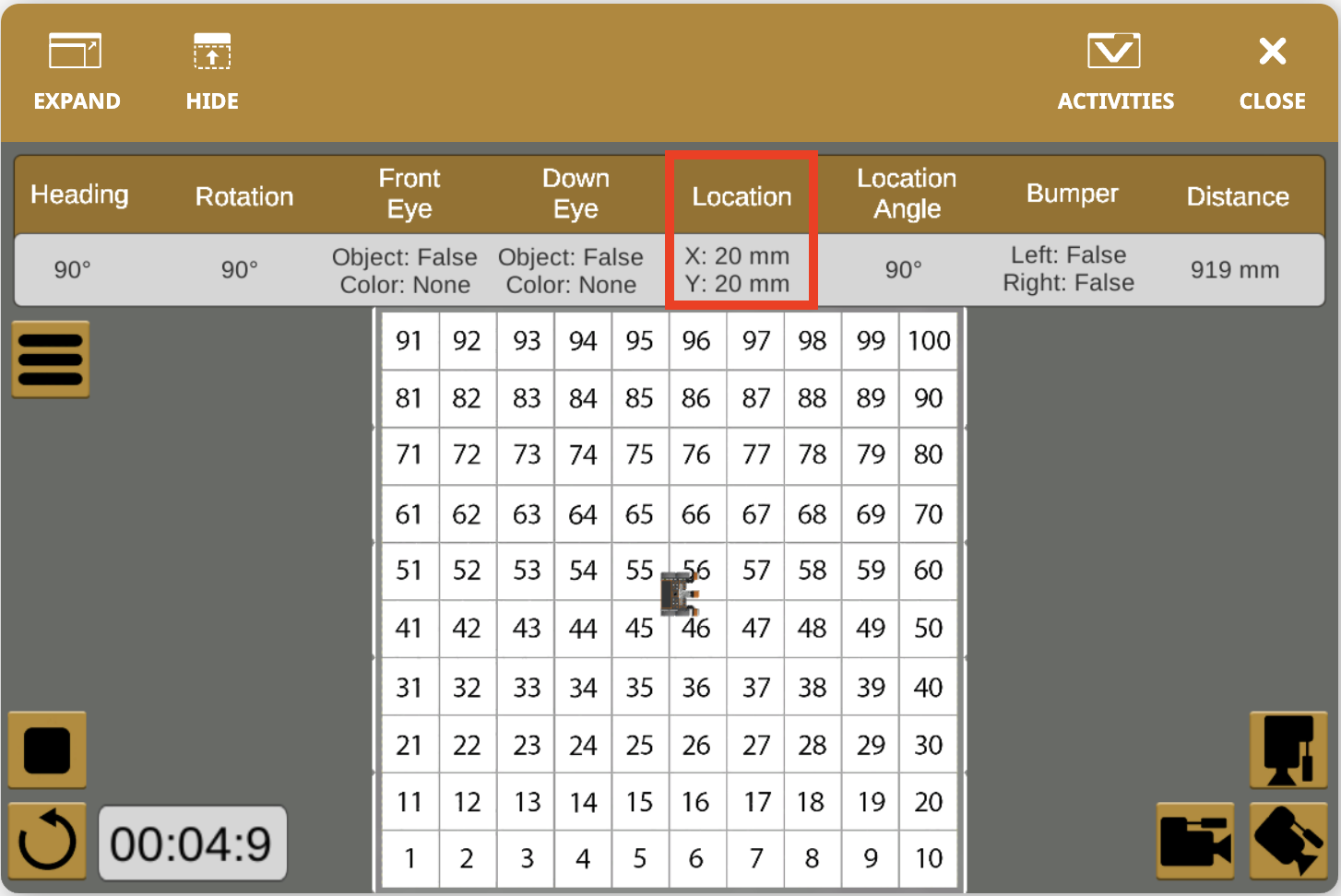
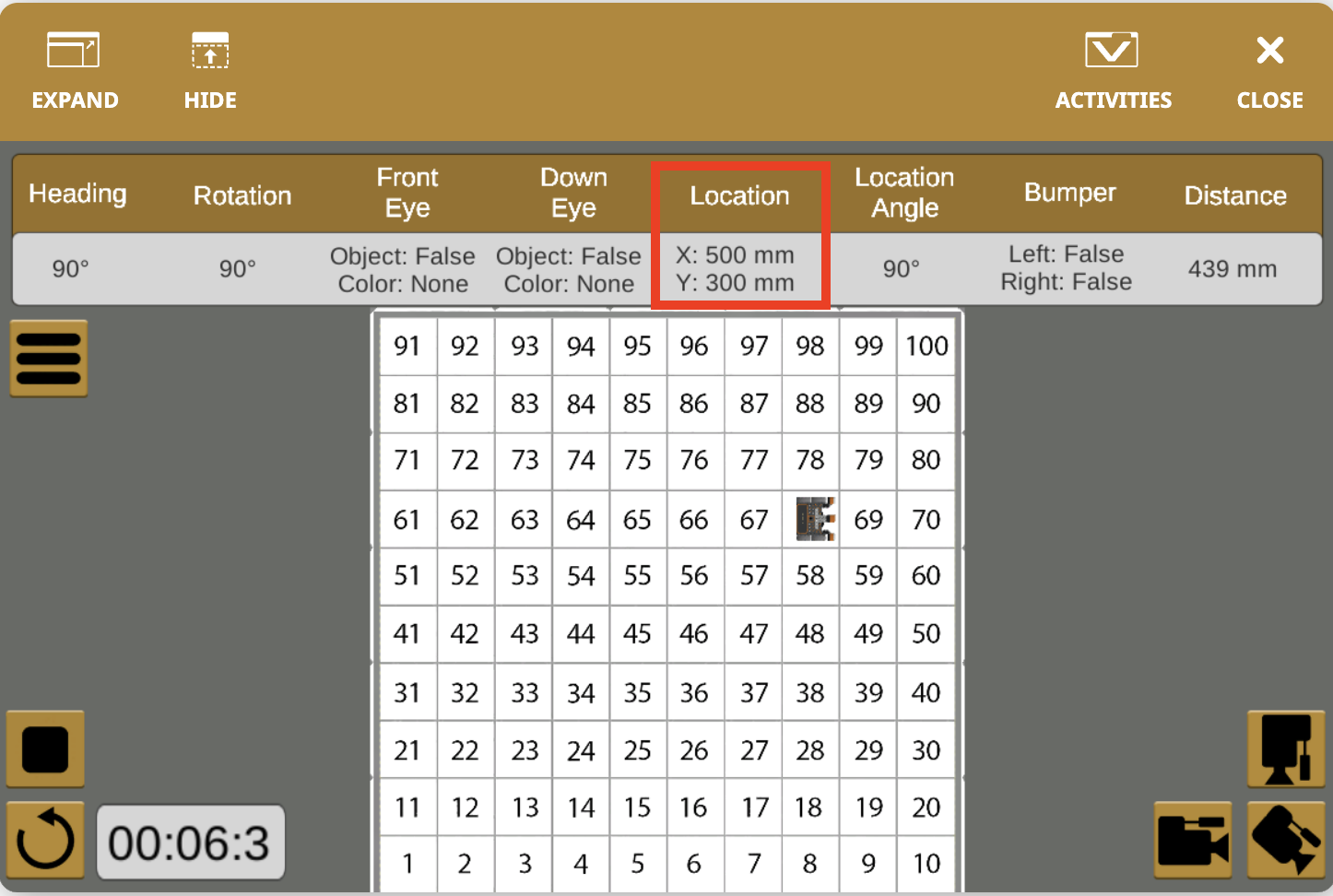
แดชบอร์ด VEXcode VR แสดงตำแหน่ง (X, Y) ของหุ่นยนต์ VR ที่กำหนดจากเซนเซอร์ตรวจจับตำแหน่ง
ดูบทความต่อไปนี้สำหรับข้อมูลเกี่ยวกับวิธีการระบุพิกัด (X, Y) บนสนามเด็กเล่นและวิธีการระบุพิกัดของตำแหน่งและมุมปัจจุบันของหุ่นยนต์ VR
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการใช้ระบบพิกัด (X, Y) และบล็อกตำแหน่งใน VEXcode VR โปรดดูบทความต่อไปนี้
นำไปใช้
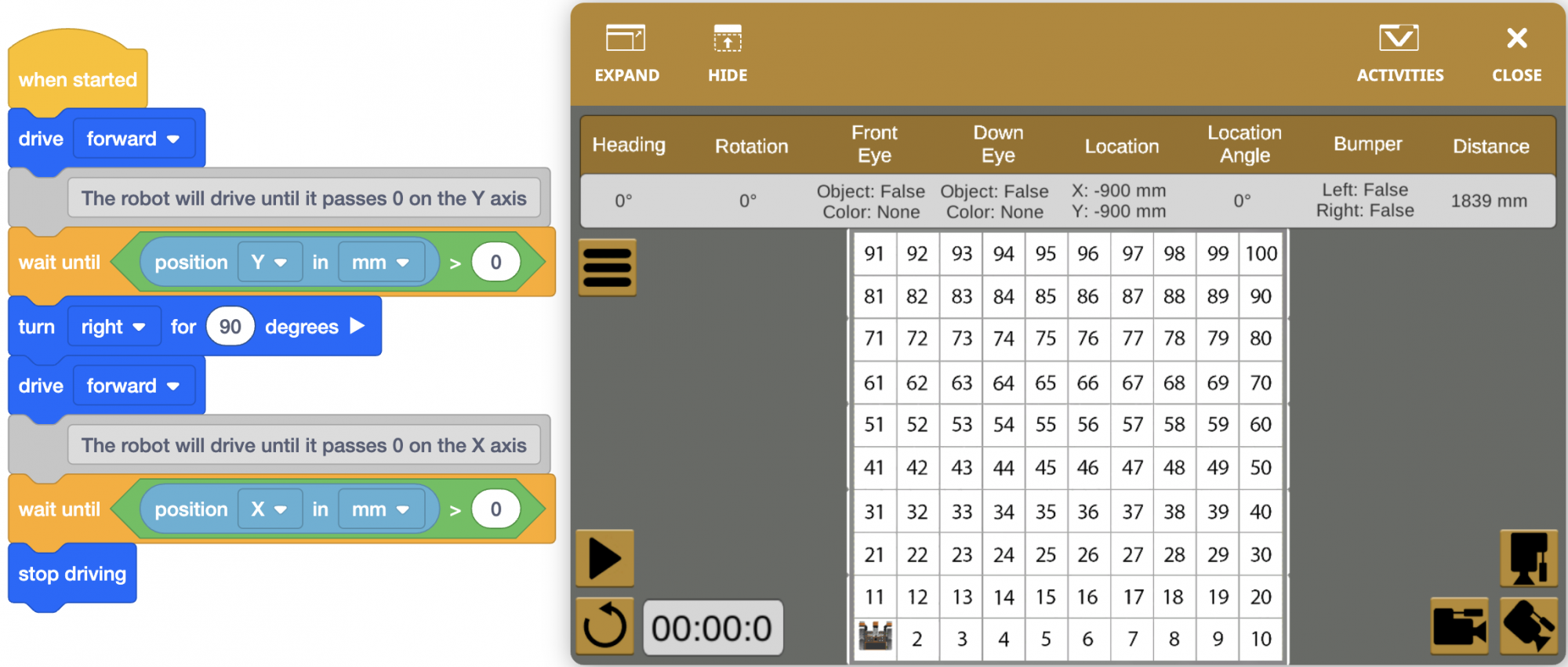
เซ็นเซอร์ตำแหน่งสามารถใช้เพื่อนำทางพิกัดของสนามเด็กเล่นใดก็ได้ โหลดและเรียกใช้โครงการตัวอย่าง "ตำแหน่ง" เพื่อดูวิธีการนำทางหุ่นยนต์ VR พร้อมข้อเสนอแนะจากเซ็นเซอร์ตำแหน่งที่ตั้ง
- เลือก "เปิดตัวอย่าง" จากเมนูแบบเลื่อนลงไฟล์
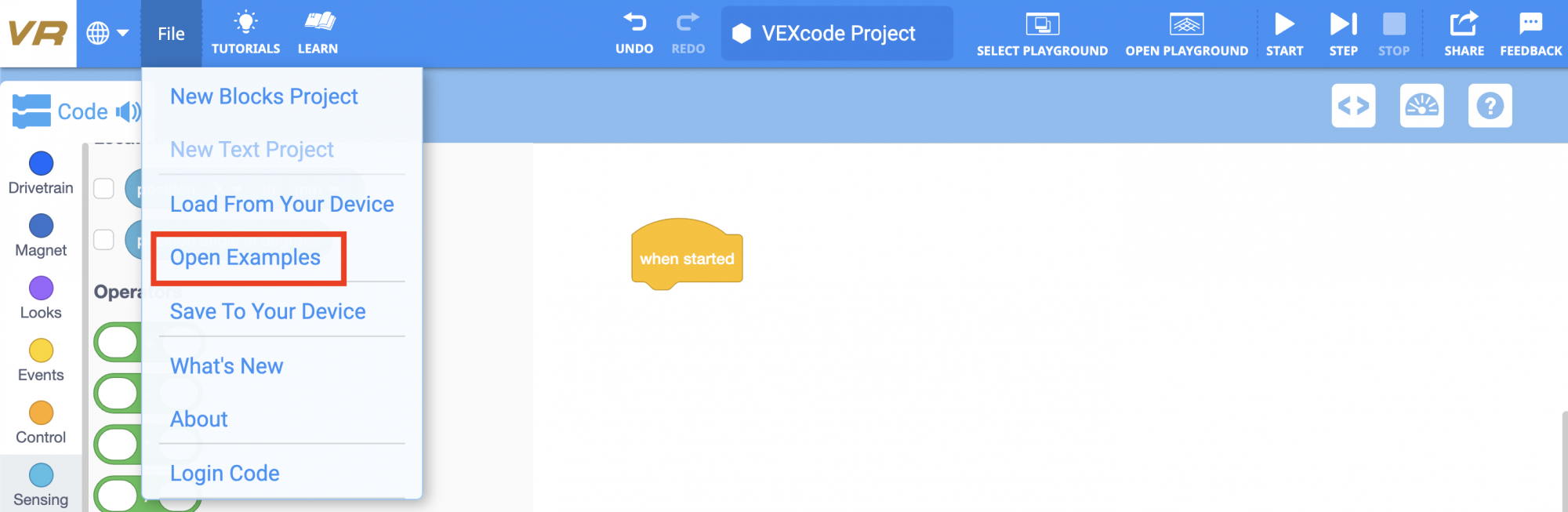
- เลือกโครงการตัวอย่าง "ทำเลที่ตั้ง"
- เลือก Number Grid Map Playground หากยังไม่เปิดและดำเนินโครงการ
-
สังเกตว่า VR Robot ขับเคลื่อนจนกว่าพิกัด Y มากกว่าศูนย์เลี้ยวขวาจากนั้นขับเคลื่อนจนกว่าพิกัด X มากกว่าศูนย์ สิ่งนี้วางหุ่นยนต์ VR ใกล้กับศูนย์กลางของ Number Grid MapPlayground ใกล้กับตำแหน่ง (0, 0)