Lezione 1: Sensore di posizione
In questa lezione, imparerai cos'è il sensore di posizione e come utilizzare il sensore di posizione per navigare nel robot VR sul piano delle coordinate nel parco giochi della mappa della griglia numerica. Imparerai come funziona il sensore di posizione e come utilizzarlo in un progetto VEXcode VR.
Risultati di apprendimento
- Identificare che il sensore di posizione legga le coordinate (X,Y) dal punto di svolta centrale di un robot VR.
- Identificare che il blocco (Posizione del robot) riporti la posizione delle coordinate X o Y di un robot VR in millimetri o pollici.
- Descrivere il motivo per cui il sensore di posizione verrebbe utilizzato in un progetto VEXcode VR.
- Identificare come creare un progetto che ha un azionamento del robot VR lungo l'asse X fino a quando il valore del sensore di posizione è maggiore di un valore di soglia.
- Spiegare come cambiano i valori delle coordinate quando un robot VR guida (ad esempio, quando un robot VR guida direttamente nel parco giochi, il valore X aumenta).
Sensore di posizione
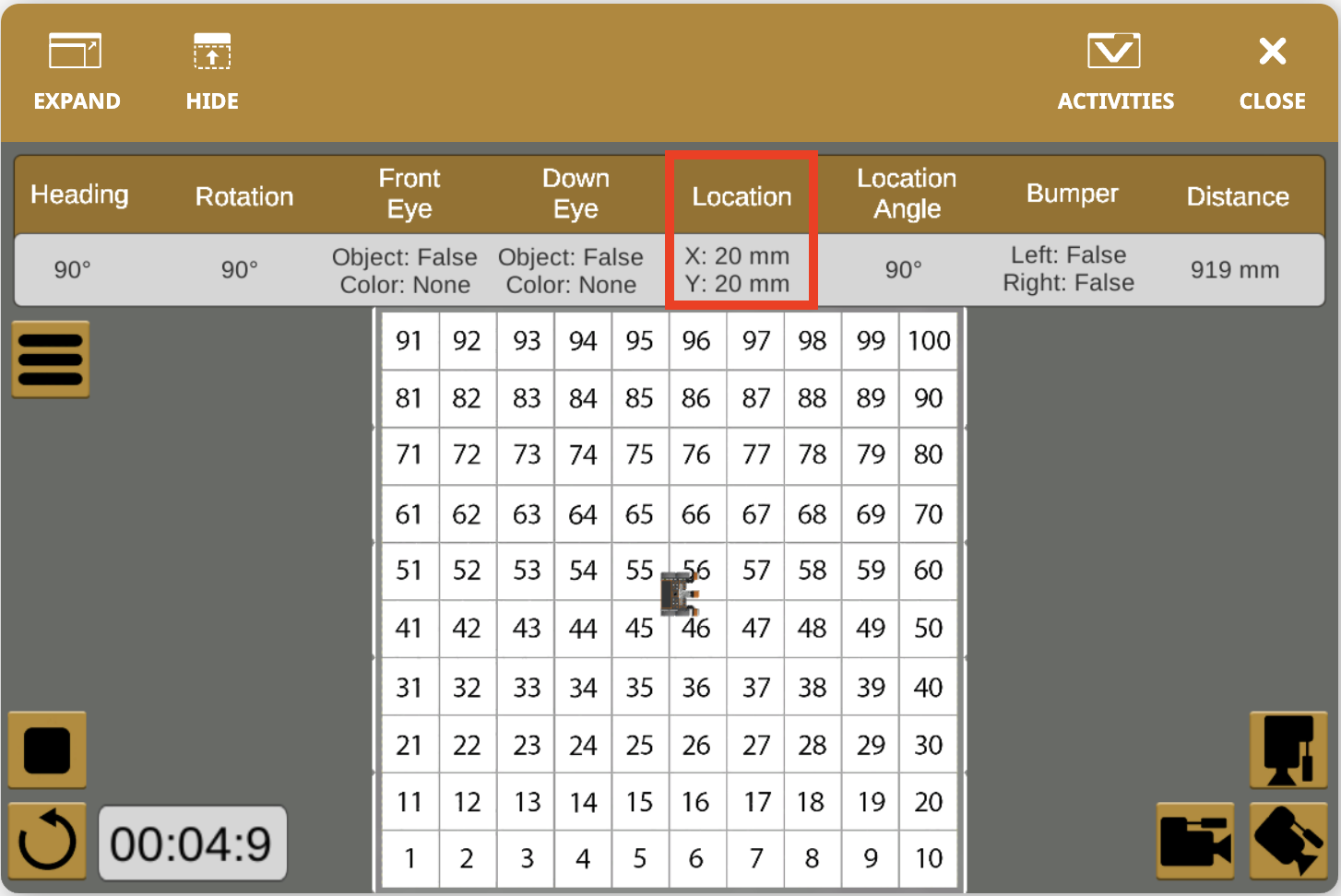
Un robot VR ha un sensore di posizione integrato che segnala la posizione (X,Y) del robot VR. La posizione del robot VR è determinata dal punto di svolta anteriore centrale. Questa è anche la posizione della penna sul robot VR.

I valori del sensore di posizione possono essere visualizzati sul cruscotto in VEXcode VR. Consulta l'articolo Sensore di posizione - Caratteristiche del robot - VEXcode VR per saperne di più sul sensore di posizione e su come utilizzarlo nei progetti VEXcode VR.
Coordinate nei parchi giochi VR
La maggior parte dei campi da gioco varia da -1000 millimetri (mm) a 1000 millimetri (mm) per le posizioni X e Y.

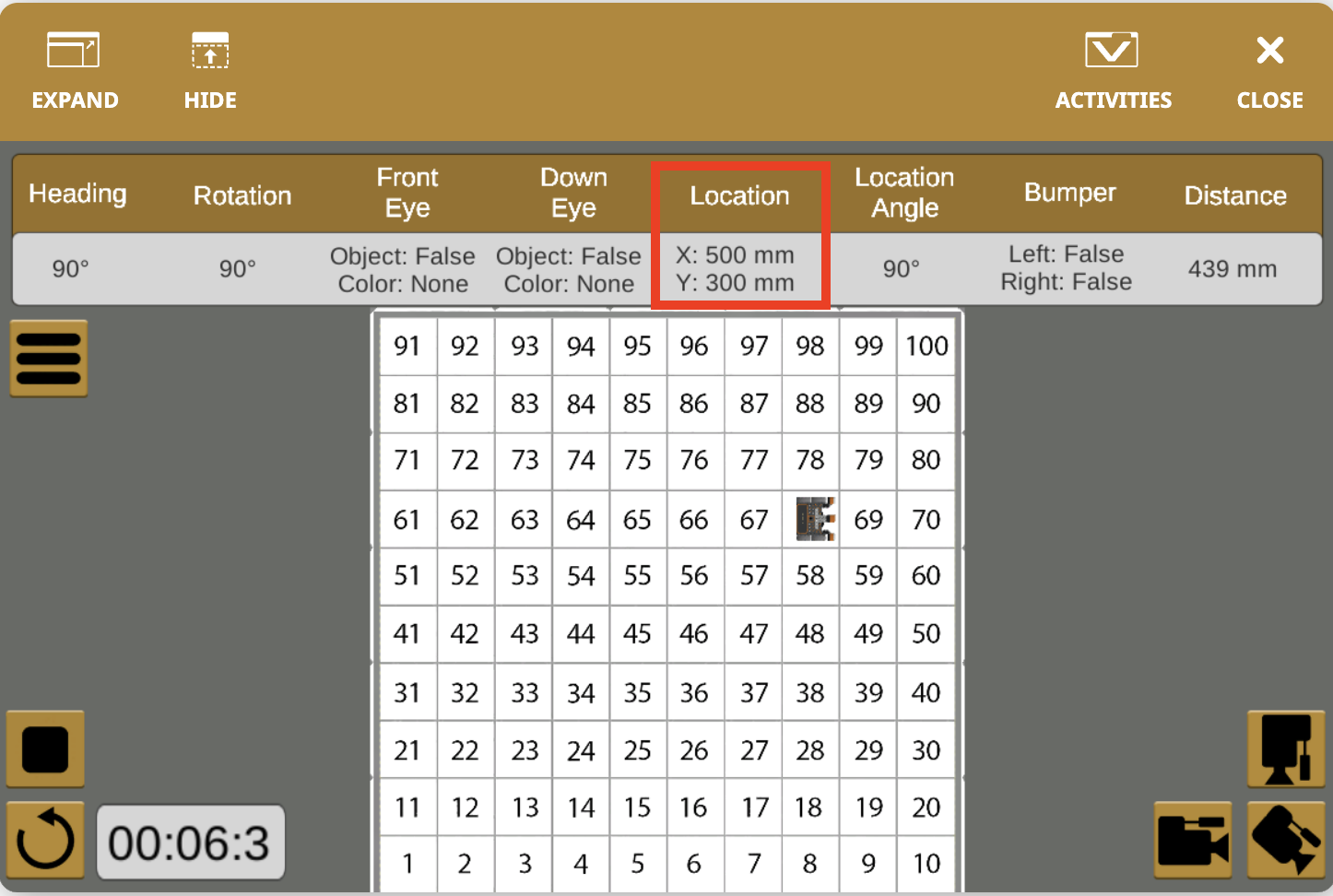
Il cruscotto VEXcode VR visualizza la posizione (X,Y) di un robot VR determinata dal sensore di posizione.
Consulta il seguente articolo per informazioni su come identificare le coordinate (X,Y) su un parco giochi e su come identificare le coordinate della posizione e dell'angolo attuali di un robot VR.
Per ulteriori informazioni su come utilizzare il sistema di coordinate (X,Y) e posizionare i blocchi in VEXcode VR, consultare il seguente articolo.
Applica
Il sensore di posizione può essere utilizzato per spostarsi tra le coordinate di qualsiasi parco giochi. Caricare ed eseguire il progetto di esempio "Posizione" per vedere come navigare nel robot VR con il feedback del sensore di posizione.
- Seleziona "Apri esempi" dal menu a discesa File.
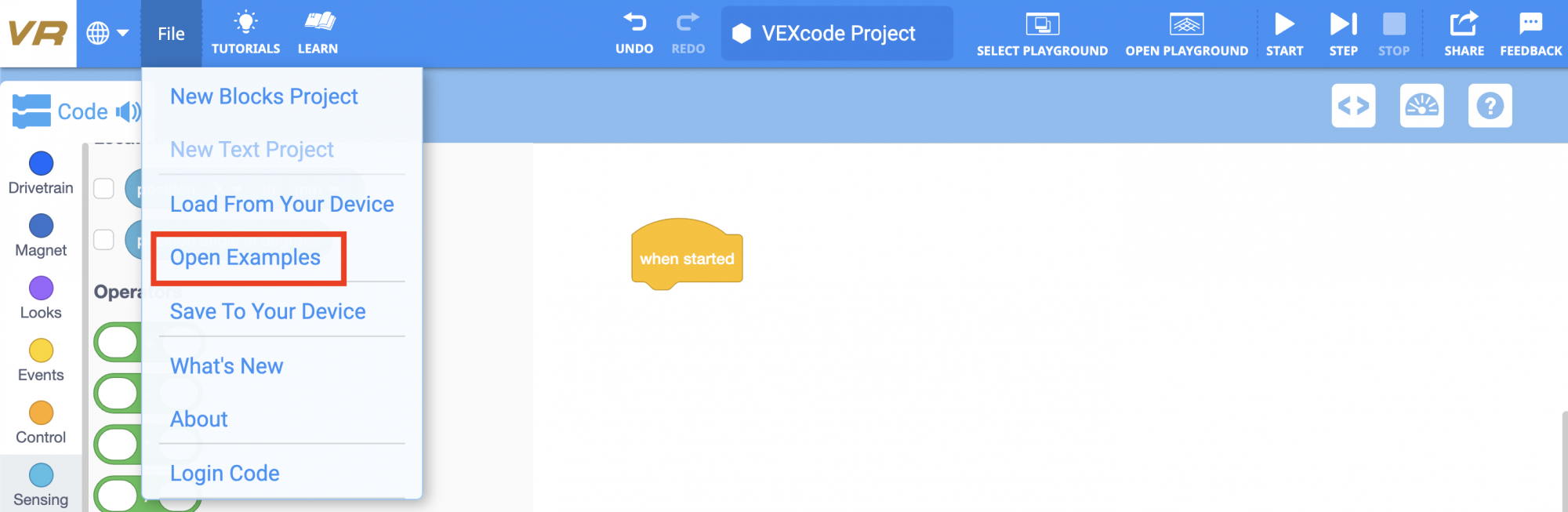
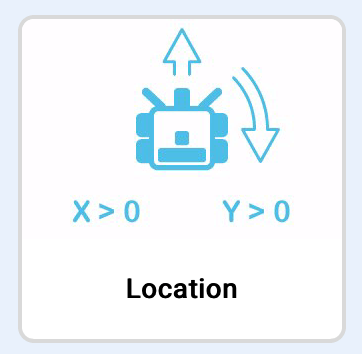
- Seleziona il progetto di esempio "Posizione".
- Seleziona l'area di gioco della mappa della griglia numerica, se non è già aperta, ed esegui il progetto.
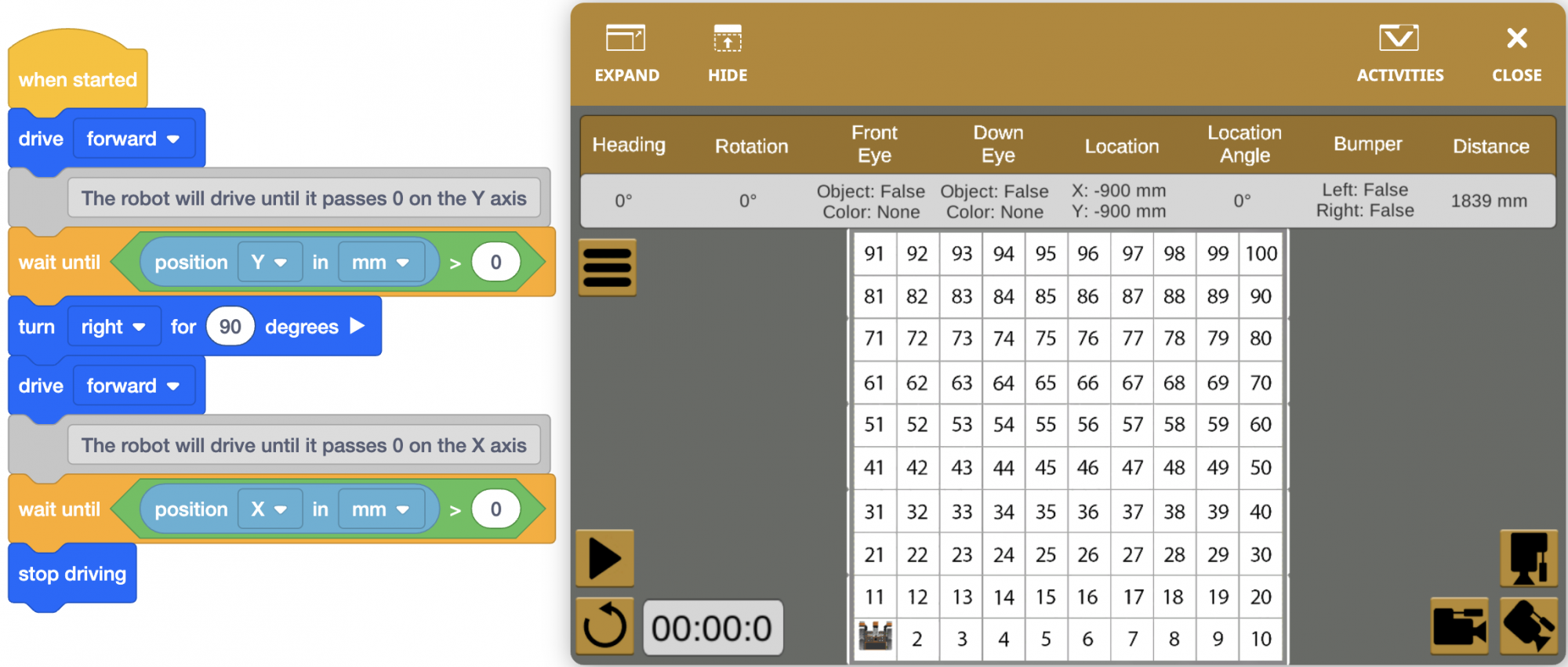
-
Si noti che il Robot VR guida fino a quando la coordinata Y è maggiore di zero, gira a destra, quindi guida fino a quando la coordinata X è maggiore di zero. Questo posiziona il robot VR vicino al centro del parco giochi della mappa della griglia numerica, vicino alla posizione (0, 0).