
الدرس 2: القيادة إلى الرقم "1"
-
الآن سيعود روبوت الواقع الافتراضي إلى الرقم "1".

-
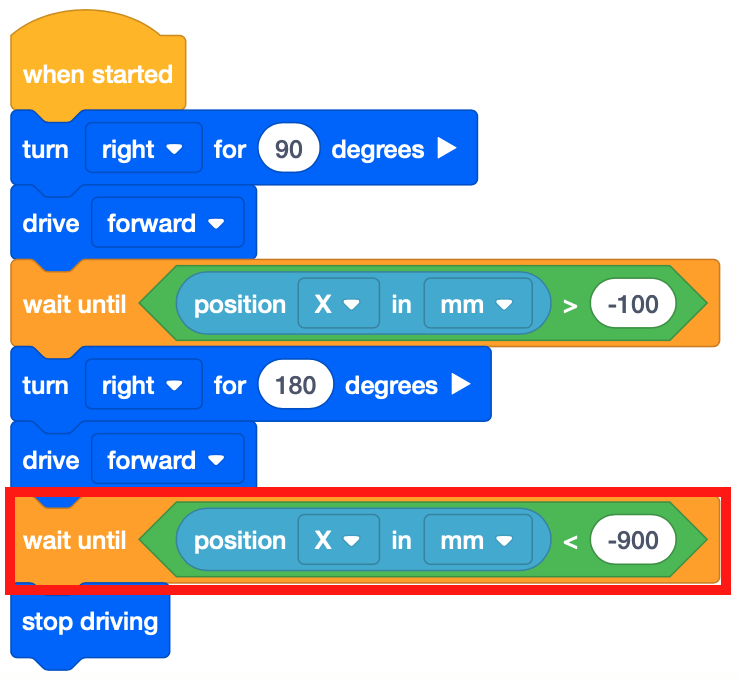
للتنقل في روبوت الواقع الافتراضي مرة أخرى إلى الرقم "1"، قم بإزالة كتلة [إيقاف القيادة] واستبدلها بالكتل التالية.

-
لاحظ أن الكتلة الثانية [انتظر حتى] تحتوي على كتلة <Less than> منطقية بدلاً من <Greater than> كتلة. وذلك لأن روبوت الواقع الافتراضي يقود الآن إلى أسفل المحور X والأرقام أصبحت أكثر سلبية. سيتوقف روبوت الواقع الافتراضي بمجرد أن تكون قيم X أقل من -900.
- قم بتشغيل ملعب خريطة شبكة الأرقام إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
- شاهد روبوت الواقع الافتراضي يقود إلى الرقم "1" في ملعب خريطة شبكة الأرقام.
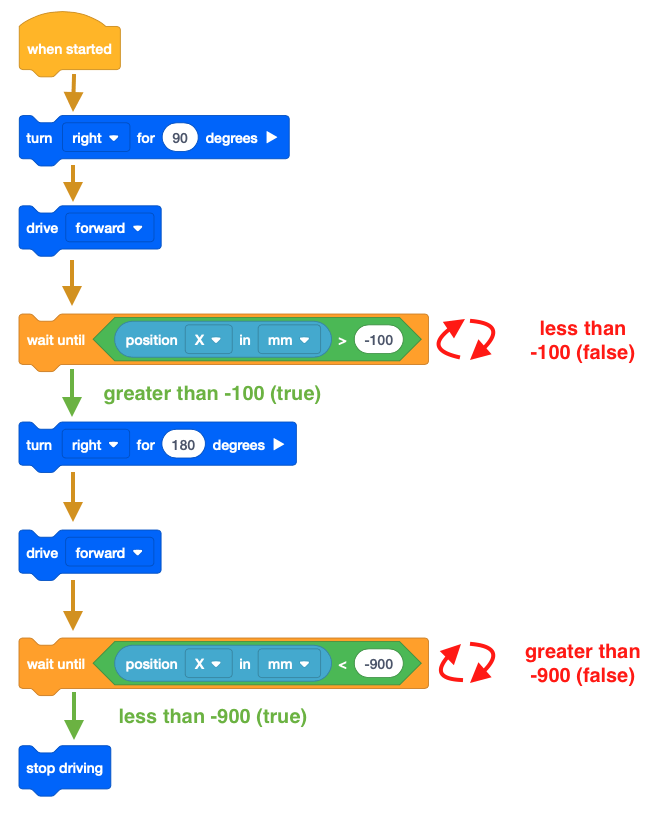
- في هذا المشروع، ينتقل روبوت الواقع الافتراضي إلى الرقم "1" في ملعب خريطة شبكة الأرقام. نظرًا لأن قيم X تتناقص مع انتقال روبوت الواقع الافتراضي إلى الرقم "1"، يستخدم المشروع <Less than> كتلة.
- سيتوقف روبوت الواقع الافتراضي بمجرد أن تكون قيمة X أقل من قيمة X للإحداثيات التي يكون عليها الرقم المشار إليه. نظرًا لأن قيمة X للرقم "1" هي -900، سيتوقف روبوت الواقع الافتراضي عن القيادة بمجرد أن تكون قيمة X أقل من -900.
لمعلوماتك
سيقوم المكوّن [انتظر] بإيقاف تدفق المشروع مؤقتًا لفترة زمنية محددة بالثواني قبل الانتقال إلى المكوّن التالي في المكدس. يمكن استخدام كتلة [انتظر] للمساعدة في مراقبة السلوكيات الفردية في مشروعك والتي قد تعمل بسرعة معًا، مثل التنقل بين موقعين مختلفين في الملعب.

استخدام كتل المفاتيح
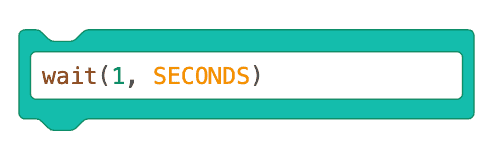
تعرض الصورة أدناه كتلة التبديل [انتظر]. لاحظ أن القيمة العددية مكتوبة قبل وحدة القياس، مفصولة بفاصلة.
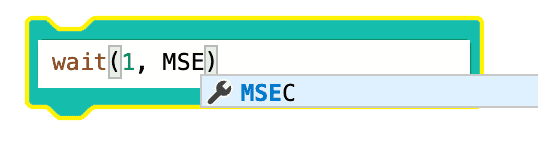
يمكنك تغيير المعلمة من ثانية إلى مللي ثانية عن طريق كتابة مللي ثانية لاستبدال معلمة الثواني. تأكد من استخدام جميع الأحرف الكبيرة أثناء إدخال المعلمة.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.