
পাঠ ২: '১' নম্বরে গাড়ি চালান
-
এখন VR রোবট '1' নম্বরে ফিরে যাবে।

-
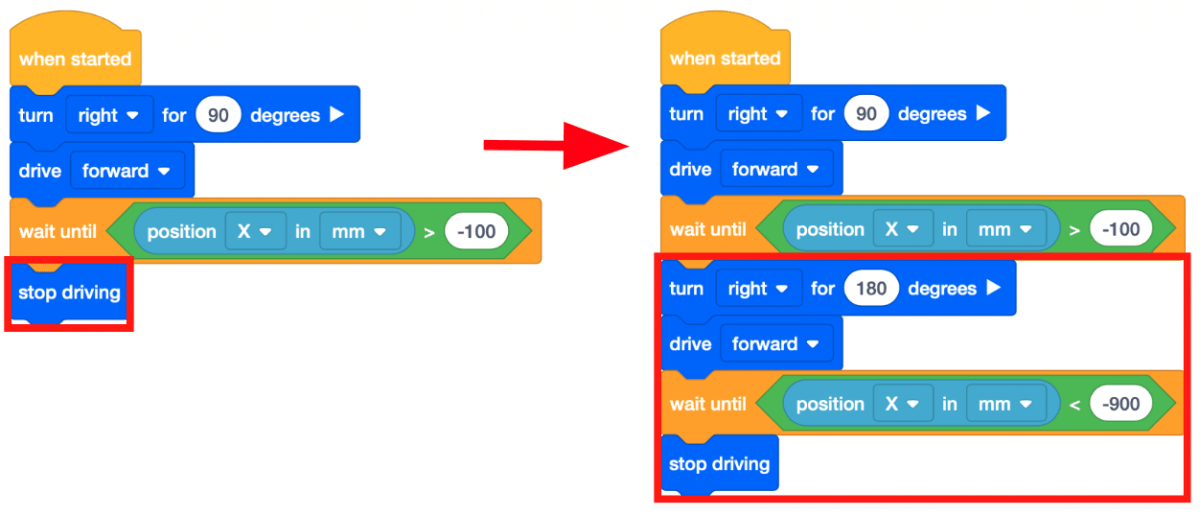
VR রোবটটিকে '1' নম্বরে ফিরে যেতে, [ড্রাইভিং বন্ধ করুন] ব্লকটি সরিয়ে নিন এবং নিম্নলিখিত ব্লকগুলি দিয়ে প্রতিস্থাপন করুন।
-
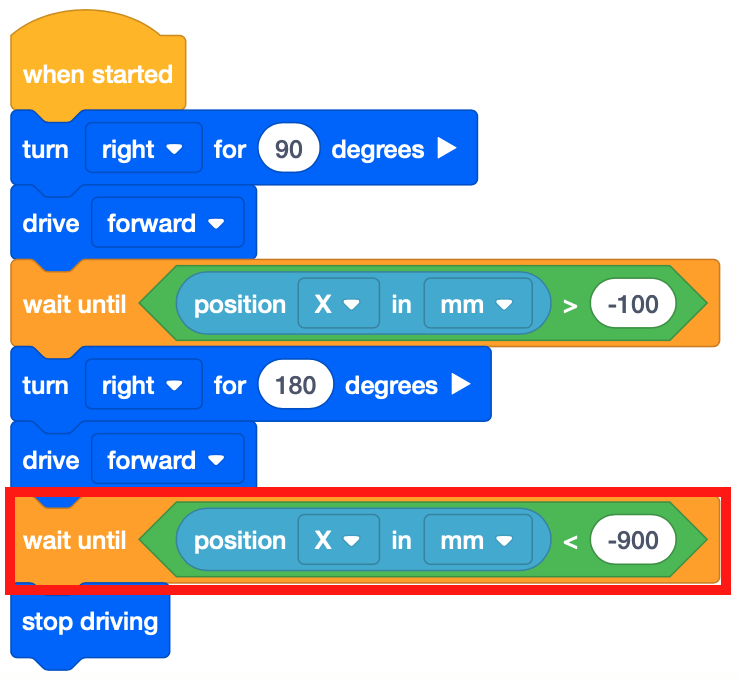
মনে রাখবেন যে দ্বিতীয় [অপেক্ষা করুন] ব্লকে <Greater than> ব্লকের পরিবর্তে <Less than> বুলিয়ান ব্লক রয়েছে। এর কারণ হল VR রোবট এখন X অক্ষের নিচে চলে যাচ্ছে এবং সংখ্যাগুলি আরও নেতিবাচক হয়ে উঠছে। X-মানগুলি -900-এর থেকে কম হলে VR রোবট বন্ধ হয়ে যাবে৷
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে ভিআর রোবট ড্রাইভ দেখুন।
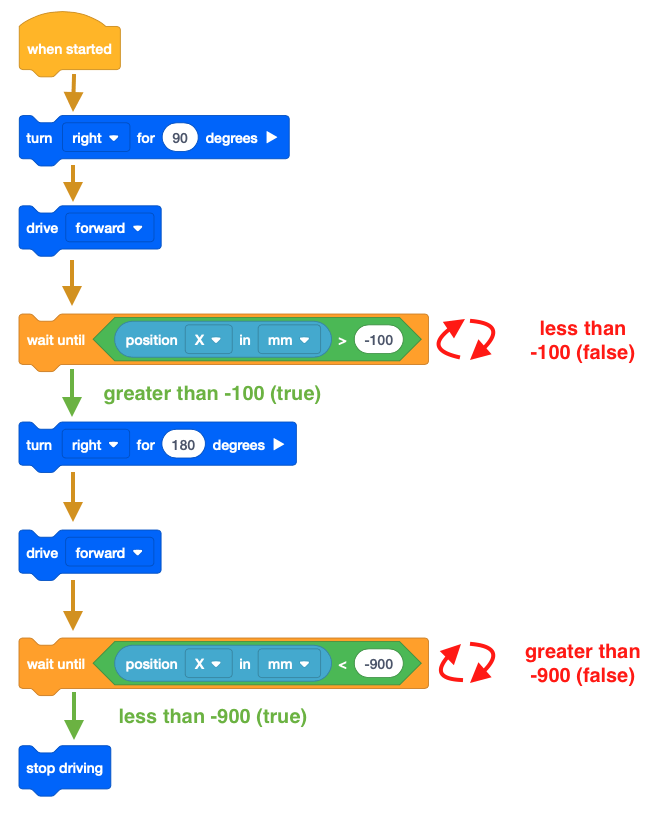
- এই প্রকল্পে, ভিআর রোবটটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে চলে যায়। যেহেতু VR রোবট '1' নম্বরে যাওয়ার কারণে X-মান কমছে , প্রকল্পটি <Less than> ব্লক ব্যবহার করে।
- VR রোবটটি যখন নির্দেশিত নম্বরটি চালু আছে সেই স্থানাঙ্কের X-মানের থেকে X-মান কম হলে তা বন্ধ হয়ে যাবে। যেহেতু '1' নম্বরের X-মান -900, X-মান -900-এর কম হলে VR রোবট গাড়ি চালানো বন্ধ করবে৷
আপনার তথ্যের জন্য
একটি [অপেক্ষা করুন] ব্লক স্ট্যাকের পরবর্তী ব্লকে যাওয়ার আগে সেকেন্ডে একটি নির্দিষ্ট সময়ের জন্য প্রকল্পের প্রবাহকে বিরতি দেবে। একটি [অপেক্ষা করুন] ব্লক আপনার প্রকল্পে স্বতন্ত্র আচরণগুলি পর্যবেক্ষণ করতে সাহায্য করতে ব্যবহার করা যেতে পারে যা দ্রুত একসাথে চলতে পারে, যেমন একটি খেলার মাঠে দুটি ভিন্ন অবস্থানের মধ্যে সরানো।

সুইচ ব্লক ব্যবহার করা
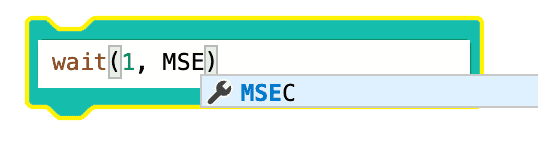
নিচের ছবিতে সুইচ [অপেক্ষা করুন] ব্লকটি দেখানো হয়েছে। মনে রাখবেন যে সংখ্যাসূচক মান পরিমাপের এককের আগে লেখা আছে, একটি কমা দ্বারা পৃথক করা হয়েছে।
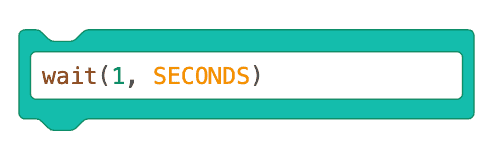
আপনি SEC লিখে SEC প্যারামিটারটি সেকেন্ড থেকে মিলিসেকেন্ডে পরিবর্তন করতে পারেন। প্যারামিটারটি প্রবেশ করার সময় সমস্ত বড় অক্ষর ব্যবহার করতে ভুলবেন না।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।