
पाठ 2: नंबर '1' तक ड्राइव करें
-
अब वीआर रोबोट वापस नंबर '1' पर पहुंच जाएगा।

-
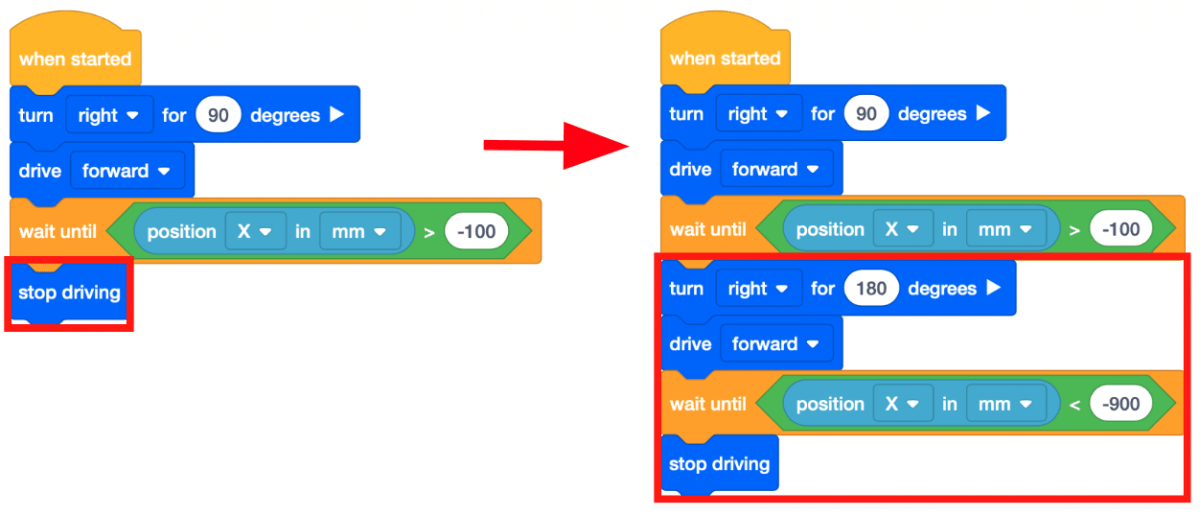
वीआर रोबोट को वापस नंबर '1' पर ले जाने के लिए, [ड्राइविंग रोकें] ब्लॉक को हटा दें और इसे निम्नलिखित ब्लॉकों से बदल दें।
-
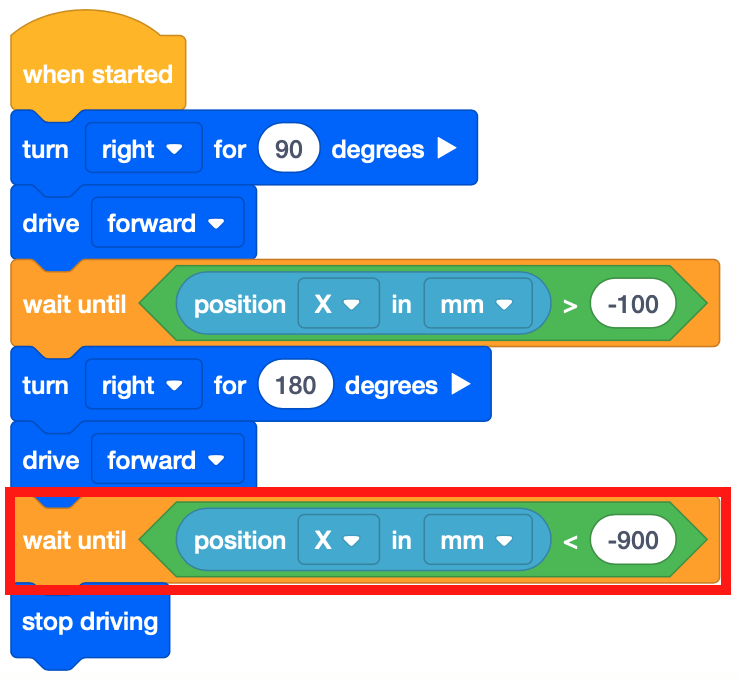
ध्यान दें कि दूसरे [Wait until] ब्लॉक में <Greater than> ब्लॉक के बजाय <Less than> बूलियन ब्लॉक है। ऐसा इसलिए है क्योंकि वीआर रोबोट अब एक्स अक्ष पर नीचे की ओर जा रहा है और संख्याएं अधिक नकारात्मक होती जा रही हैं। जब X-मान -900 से कम हो जाएगा तो VR रोबोट रुक जाएगा।
- यदि नंबर ग्रिड मैप प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं।
- नंबर ग्रिड मानचित्र खेल के मैदानपर नंबर '1' के लिए वी.आर. रोबोट ड्राइव देखें।
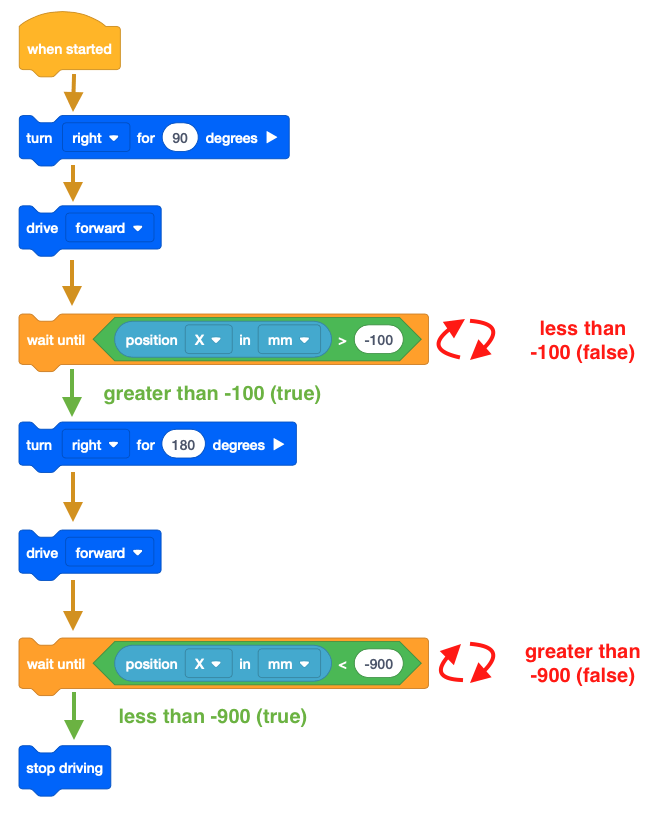
- इस परियोजना में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '1' तक ड्राइव करता है। चूंकि वीआर रोबोट के संख्या '1' तक पहुंचने पर X-मान घटता है, इसलिए परियोजना में <Less than> ब्लॉक का उपयोग किया जाता है।
- वीआर रोबोट तब रुक जाएगा जब उसका एक्स-मान, उस निर्देशांक के एक्स-मान से कम हो जाएगा जिस पर संकेतित संख्या स्थित है। चूंकि संख्या '1' का X-मान -900 है, इसलिए X-मान -900 से कम होने पर VR रोबोट गाड़ी चलाना बंद कर देगा।
आपकी जानकारी के लिए
[प्रतीक्षा] ब्लॉक स्टैक में अगले ब्लॉक पर जाने से पहले सेकंड में एक विशिष्ट समय अवधि के लिए परियोजना के प्रवाह को रोक देगा। [प्रतीक्षा] ब्लॉक का उपयोग आपके प्रोजेक्ट में व्यक्तिगत व्यवहारों का निरीक्षण करने में मदद के लिए किया जा सकता है जो एक साथ जल्दी से चल सकते हैं, जैसे कि प्लेग्राउंड पर दो अलग-अलग स्थानों के बीच घूमना।

स्विच ब्लॉक का उपयोग करना
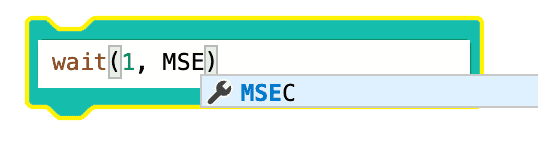
नीचे दी गई छवि स्विच [प्रतीक्षा] ब्लॉक प्रदर्शित करती है। ध्यान दें कि संख्यात्मक मान माप की इकाई से पहले लिखा जाता है, जिसे अल्पविराम से अलग किया जाता है।
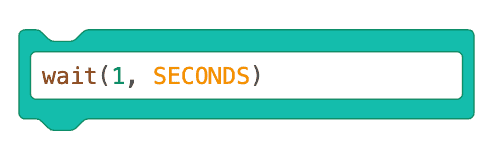
आप SECONDS पैरामीटर के स्थान पर MSEC टाइप करके पैरामीटर को सेकंड से मिलीसेकंड में बदल सकते हैं। पैरामीटर दर्ज करते समय सभी बड़े अक्षरों का उपयोग करना सुनिश्चित करें।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।