
Pelajaran 2: Berkendara ke Nomor '1'
-
Sekarang Robot VR akan melaju kembali ke angka '1.'

-
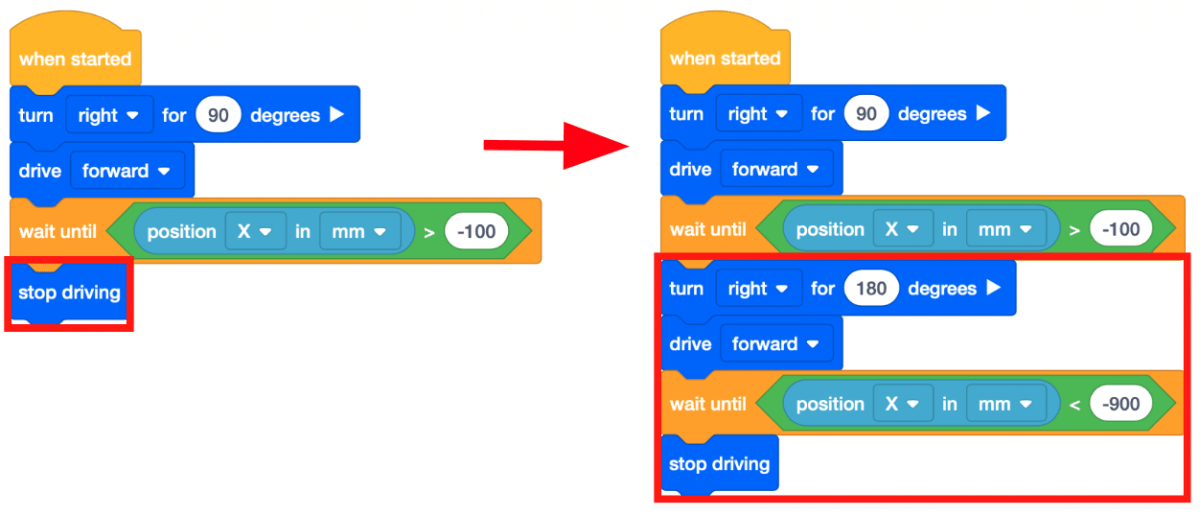
Untuk menavigasi Robot VR kembali ke angka '1,' hapus blok [Berhenti mengemudi] dan ganti dengan blok berikut.
-
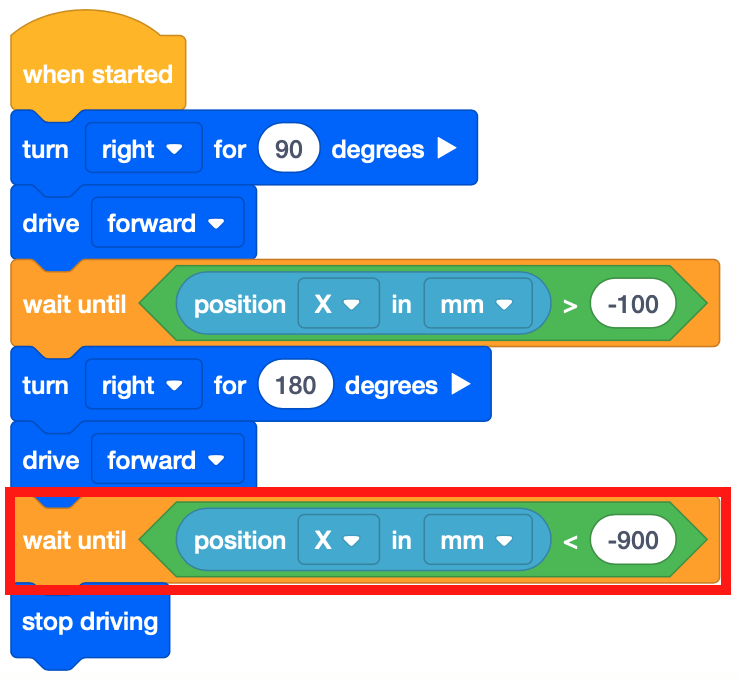
Perhatikan bahwa blok [Tunggu hingga] kedua berisi blok Boolean <Less than> , bukan blok <Greater than>. Hal ini karena Robot VR sekarang bergerak ke bawah sumbu X dan angka-angkanya menjadi lebih negatif. Robot VR akan berhenti saat nilai X KURANG dari -900.
- Luncurkan Number Grid Map Playground jika belum terbuka dan jalankan proyeknya.
- Saksikan Robot VR melaju ke angka '1' pada Peta Kotak Angka Playground.
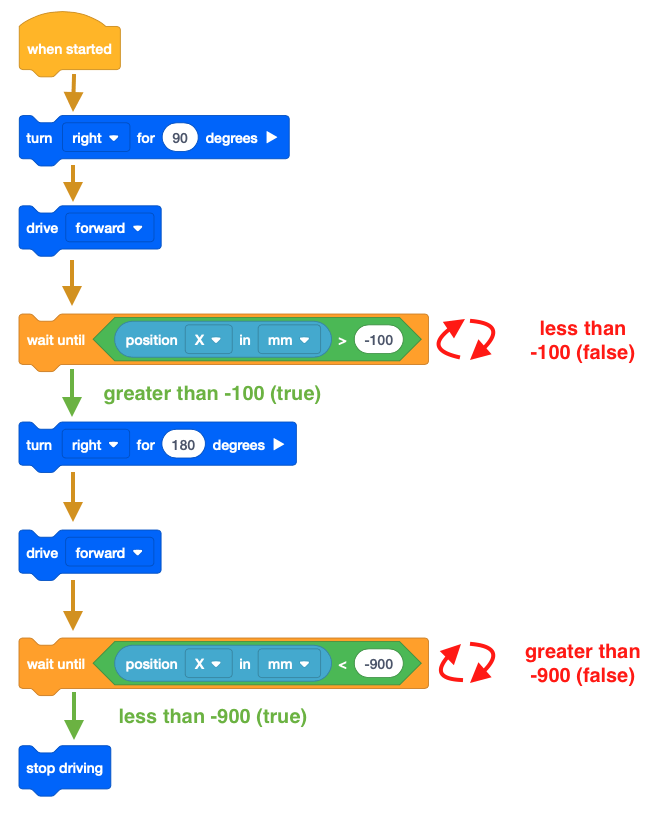
- Dalam proyek ini, Robot VR melaju menuju angka '1' pada Peta Kotak Angka Playground. Karena nilai X adalah berkurang saat Robot VR melaju ke angka '1', proyek menggunakan blok <Less than>.
- Robot VR akan berhenti saat nilai X-nya dikurangi daripada nilai X koordinat tempat angka yang ditunjuk berada. Karena nilai X dari angka '1' adalah -900, Robot VR akan berhenti melaju jika nilai X-nya kurang dari -900.
Untuk Informasi Anda
Blok [Tunggu] akan menghentikan aliran proyek selama periode waktu tertentu dalam hitungan detik sebelum beralih ke blok berikutnya dalam tumpukan. Blok [Tunggu] dapat digunakan untuk membantu mengamati perilaku individual dalam proyek Anda yang mungkin berjalan cepat bersamaan, seperti berpindah di antara dua lokasi berbeda di Playground.

Menggunakan Blok Switch
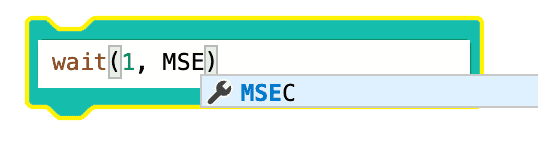
Gambar di bawah menampilkan blok Switch [Wait]. Perhatikan bahwa nilai numerik ditulis sebelum satuan pengukuran, dipisahkan dengan koma.
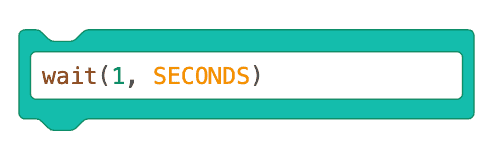
Anda dapat mengubah parameter dari detik ke milidetik dengan mengetik MSEC untuk mengganti parameter SECONDS. Pastikan untuk menggunakan semua huruf kapital saat memasukkan parameter.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.