
Bài 2: Lái xe đến số '1'
-
Bây giờ VR Robot sẽ lái xe trở về số '1'.

-
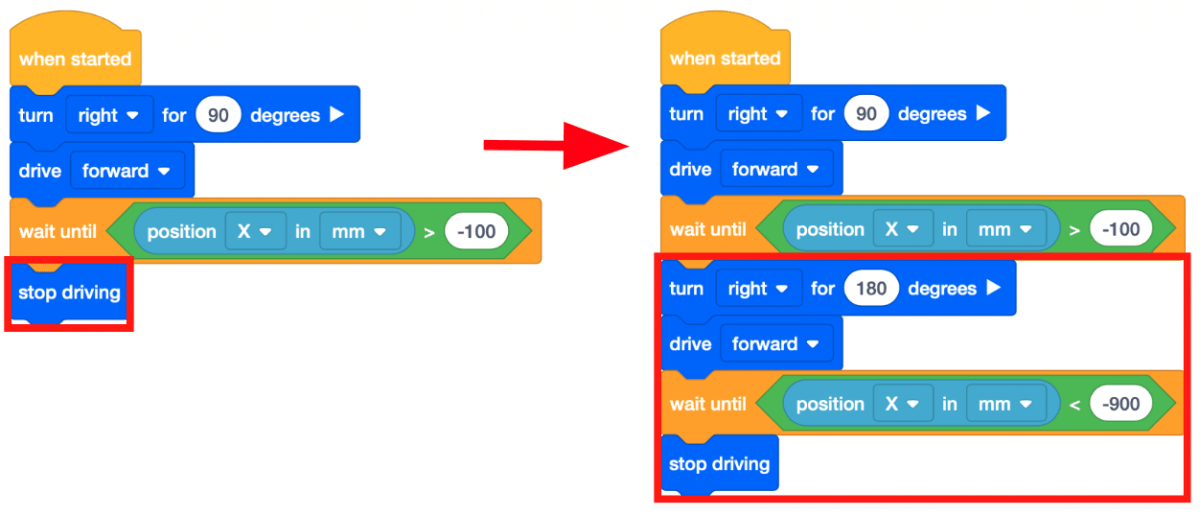
Để điều hướng Robot VR trở lại số '1', hãy xóa khối [Dừng lái xe] và thay thế bằng các khối sau.
-
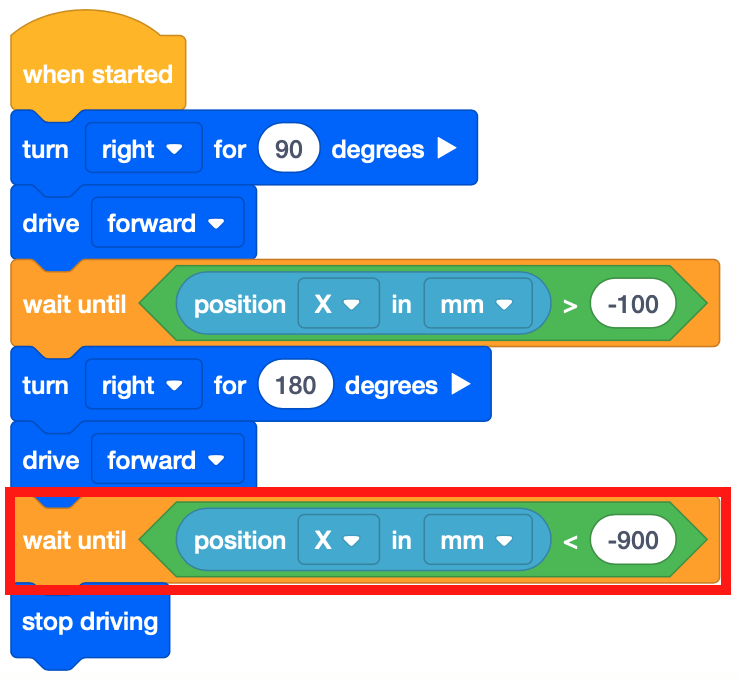
Lưu ý rằng khối [Chờ cho đến] thứ hai chứa khối Boolean <Less than> thay vì khối <Greater than>. Nguyên nhân là do VR Robot hiện đang di chuyển theo trục X và các con số đang trở nên âm hơn. Robot VR sẽ dừng lại khi giá trị X NHỎ HƠN -900.
- Khởi chạy Sân chơi bản đồ lưới số nếu nó chưa mở và chạy dự án.
- Xem Robot VR lái đến số '1' trên Sân chơi bản đồ lưới số .
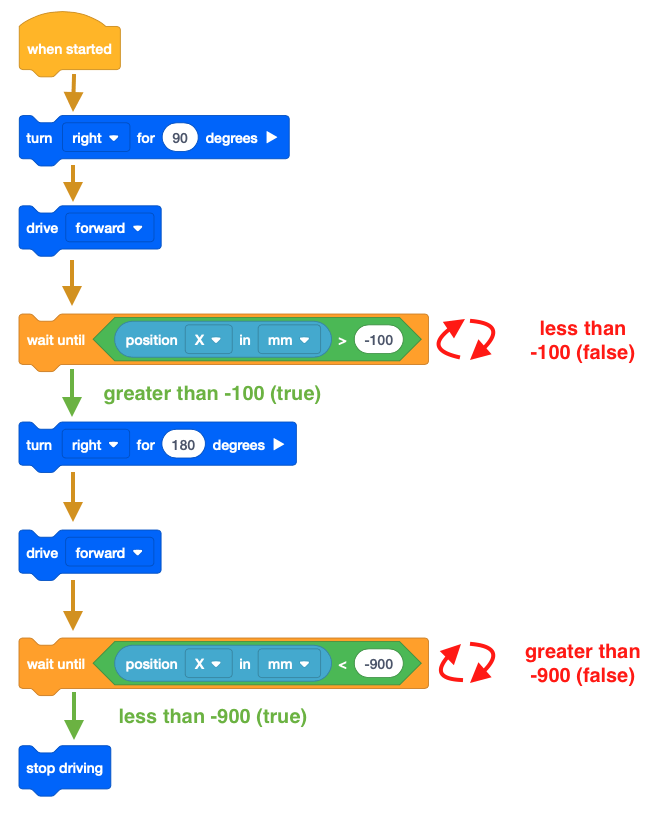
- Trong dự án này, Robot VR sẽ di chuyển đến số '1' trên Sân chơi bản đồ lưới số . Vì các giá trị X là giảm dần khi Robot VR di chuyển đến số '1', nên dự án sử dụng khối <Less than>.
- Robot VR sẽ dừng lại khi giá trị X của nó bằng trừ đi so với giá trị X của tọa độ chứa số được chỉ định. Vì giá trị X của số '1' là -900, nên Robot VR sẽ dừng lái khi giá trị X nhỏ hơn -900.
Để bạn biết
Khối [Chờ] sẽ tạm dừng luồng dự án trong một khoảng thời gian cụ thể tính bằng giây trước khi chuyển sang khối tiếp theo trong ngăn xếp. Khối [Chờ] có thể được sử dụng để giúp quan sát các hành vi riêng lẻ trong dự án của bạn có thể diễn ra nhanh chóng cùng nhau, chẳng hạn như di chuyển giữa hai vị trí khác nhau trên Sân chơi.

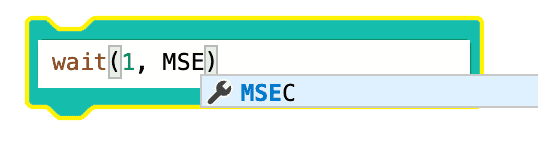
Sử dụng khối chuyển đổi
Hình ảnh bên dưới hiển thị khối Chuyển đổi [Chờ]. Lưu ý rằng giá trị số được viết trước đơn vị đo lường, phân tách bằng dấu phẩy.
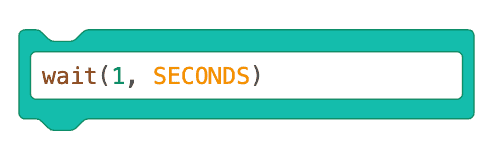
Bạn có thể thay đổi tham số từ giây sang mili giây bằng cách nhập MSEC để thay thế tham số SECONDS. Hãy đảm bảo sử dụng tất cả chữ cái in hoa khi nhập tham số.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.