
บทเรียนที่ 2: ขับรถไปยังหมายเลข ‘1’
-
ตอนนี้หุ่นยนต์ VR จะขับกลับไปที่หมายเลข ‘1’

-
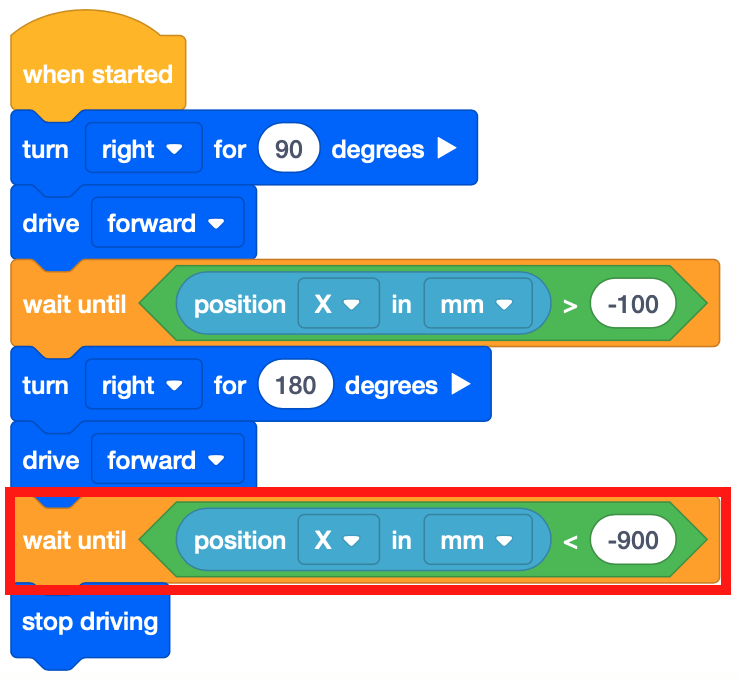
หากต้องการนำทางหุ่นยนต์ VR กลับไปที่หมายเลข ‘1’ ให้ถอดบล็อค [หยุดขับ] และแทนที่ด้วยบล็อคต่อไปนี้

-
โปรดทราบว่าบล็อก [รอจนกว่า] บล็อกที่สองมีบล็อก <Less than> บูลีนแทน <Greater than> บล็อก เนื่องจากตอนนี้หุ่นยนต์ VR กำลังขับเคลื่อนแกน X และตัวเลขเริ่มเป็นลบมากขึ้น หุ่นยนต์ VR จะหยุดทำงานเมื่อค่า X น้อยกว่า -900
- เปิด Number Grid Map Playground หากยังไม่ได้เปิดและเรียกใช้โครงการ
- ดู VR Robot ขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground
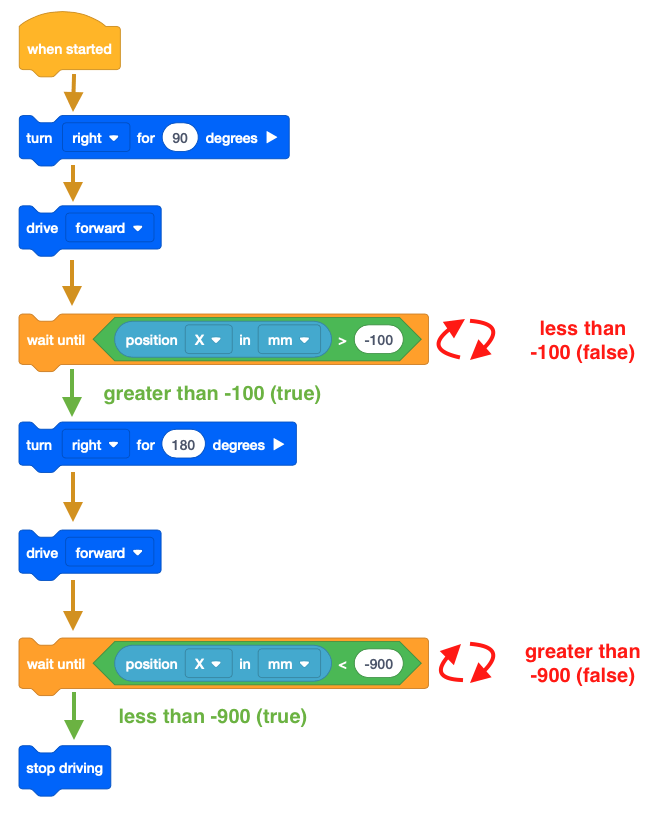
- ในโครงการนี้หุ่นยนต์ VR จะขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground เนื่องจากค่า X ลด ลงเมื่อ VR Robot ขับเคลื่อนไปที่หมายเลข ‘1’ โครงการจึงใช้ <Less than> บล็อก
- หุ่นยนต์ VR จะหยุดทำงานเมื่อค่า X น้อย กว่าค่า X ของพิกัดที่หมายเลขที่ระบุเปิดอยู่ เนื่องจากค่า X ของหมายเลข ‘1’ คือ -900 หุ่นยนต์ VR จะหยุดขับเมื่อค่า X น้อยกว่า -900
สำหรับข้อมูลของคุณ
บล็อก [รอ] จะหยุดการไหลของโปรเจกต์ชั่วคราวเป็นระยะเวลาหนึ่งในไม่กี่วินาทีก่อนที่จะย้ายไปยังบล็อกถัดไปในสแต็ก บล็อก [รอ] สามารถใช้เพื่อช่วยในการสังเกตพฤติกรรมของแต่ละบุคคลในโครงการของคุณที่อาจทำงานร่วมกันได้อย่างรวดเร็วเช่นการย้ายระหว่างสองสถานที่ที่แตกต่างกันบนสนามเด็กเล่น

การใช้สวิทช์บล็อก
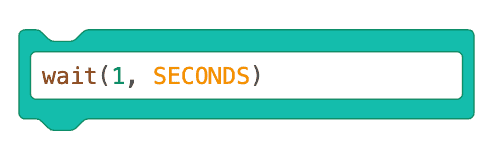
ภาพด้านล่างแสดงบล็อค Switch [Wait] โปรดทราบว่าค่าตัวเลขจะถูกเขียนก่อนหน่วยการวัดคั่นด้วยเครื่องหมายจุลภาค
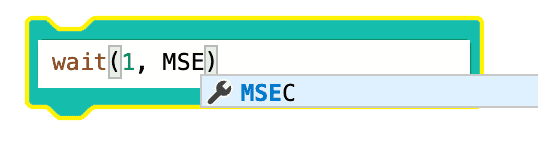
คุณสามารถเปลี่ยนพารามิเตอร์จากวินาทีเป็นมิลลิวินาทีได้โดยพิมพ์ MSEC เพื่อแทนที่พารามิเตอร์วินาที ตรวจสอบให้แน่ใจว่าได้ใช้ตัวพิมพ์ใหญ่ทั้งหมดในขณะที่ป้อนพารามิเตอร์
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป