
Leçon 2 : Atteindre le numéro « 1 »
-
Maintenant, le robot VR va revenir au nombre « 1 ».

-
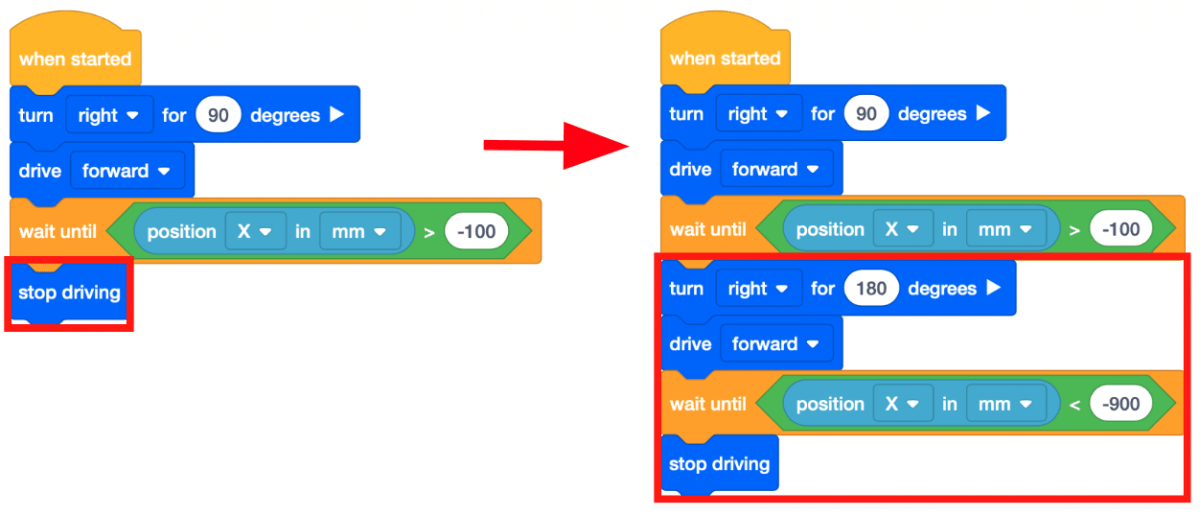
Pour ramener le robot VR au numéro « 1 », retirez le bloc [Arrêter de conduire] et remplacez-le par les blocs suivants.
-
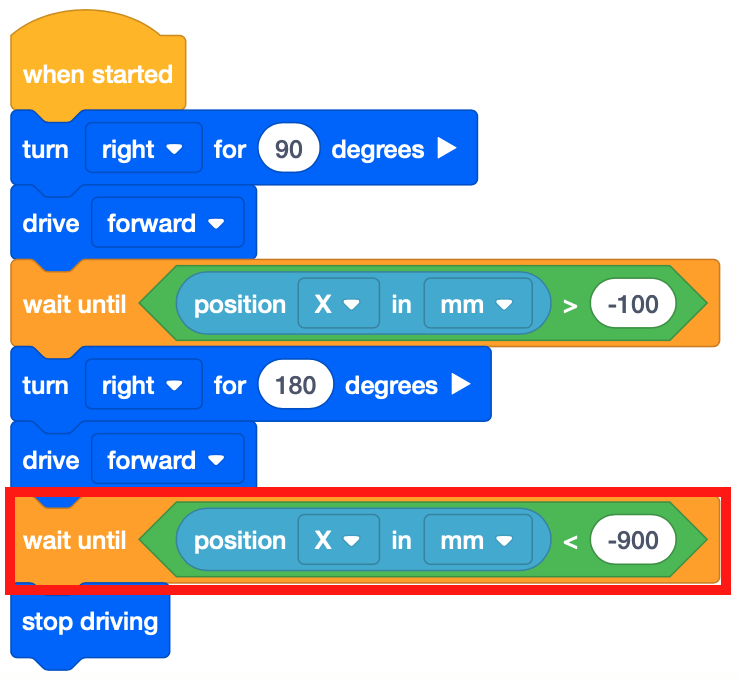
Notez que le deuxième bloc [Attendre jusqu'à] contient un bloc <Less than> booléen au lieu d'un <Greater than> bloc. En effet, le robot VR descend maintenant l'axe X et les chiffres deviennent de plus en plus négatifs. Le robot VR s'arrêtera une fois que les valeurs X seront INFÉRIEURES à -900.
- Lancez le terrain de jeu Number Grid Map s'il n'est pas déjà ouvert et exécutez le projet.
- Regardez le lecteur VR Robot jusqu'au numéro « 1 » sur le terrain de jeu Number Grid Map.
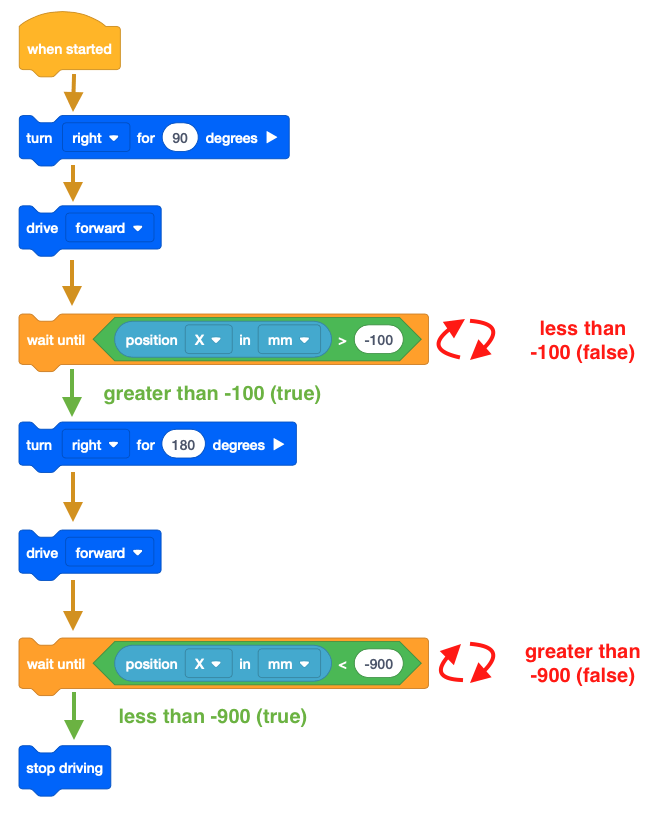
- Dans ce projet, le robot VR se dirige vers le numéro « 1 » sur le terrain de jeu de la carte de la grille numérique. Étant donné que les valeurs X diminuent à mesure que le robot VR atteint le nombre « 1 », le projet utilise un <Less than> bloc.
- Le robot VR s'arrêtera une fois que sa valeur X sera inférieure à la valeur X de la coordonnée sur laquelle se trouve le nombre indiqué. Étant donné que la valeur X du nombre « 1 » est de -900, le robot VR cessera de conduire une fois que la valeur X sera inférieure à -900.
Pour votre information
Un bloc [Attendre] mettra en pause le flux du projet pendant une période de temps spécifique en secondes avant de passer au bloc suivant dans la pile. Un bloc [Attendre] peut être utilisé pour aider à observer les comportements individuels dans votre projet qui peuvent fonctionner rapidement ensemble, comme se déplacer entre deux endroits différents sur une aire de jeux.

Utilisation des blocs de commutation
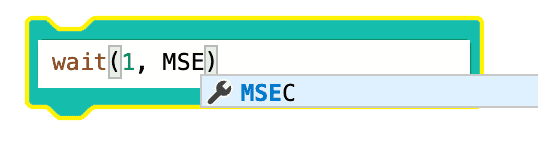
L'image ci-dessous affiche le bloc Interrupteur [Attendre]. Notez que la valeur numérique est écrite avant l'unité de mesure, séparée par une virgule.
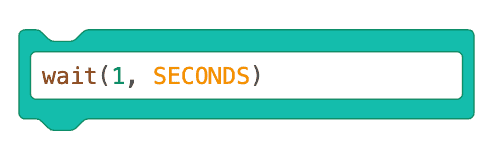
Vous pouvez modifier le paramètre de secondes en millisecondes en tapant MSEC pour remplacer le paramètre SECONDES. Assurez-vous d'utiliser toutes les lettres majuscules lors de la saisie du paramètre.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.