
Lección 2: Conducir al número ‘1’
-
Ahora el robot VR volverá al número ‘1’.

-
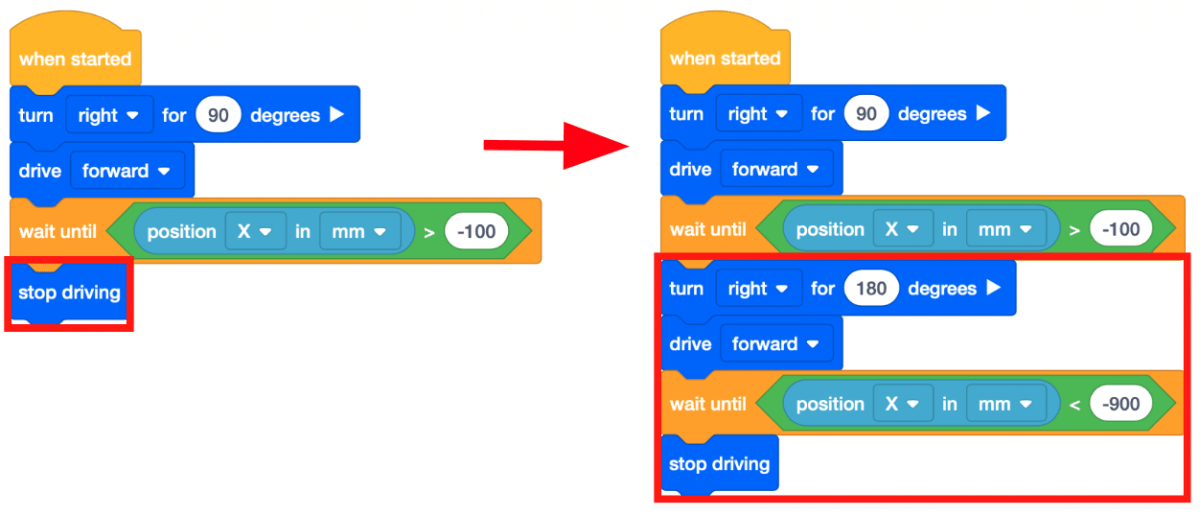
Para que el robot VR vuelva al número ‘1’, retire el bloque [Stop driving] y reemplácelo por los siguientes bloques.
-
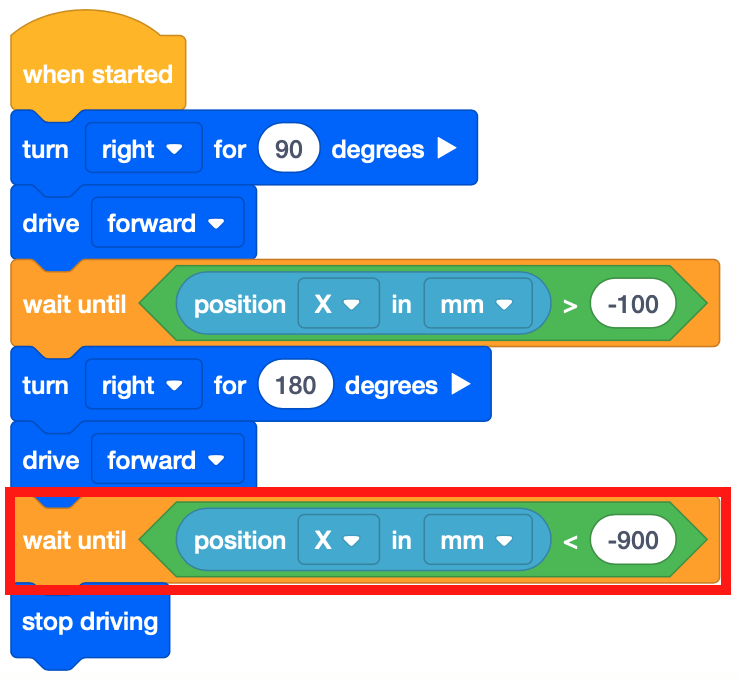
Tenga en cuenta que el segundo bloque [Esperar hasta] contiene un bloque <Less than> booleano en lugar de un <Greater than> bloque. Esto se debe a que el robot VR ahora está conduciendo por el eje X y los números se están volviendo más negativos. El robot VR se detendrá una vez que los valores X sean INFERIORES a -900.
- Inicie Number Grid Map Playground si aún no está abierto y ejecute el proyecto.
- Observe cómo el robot VR conduce al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica.
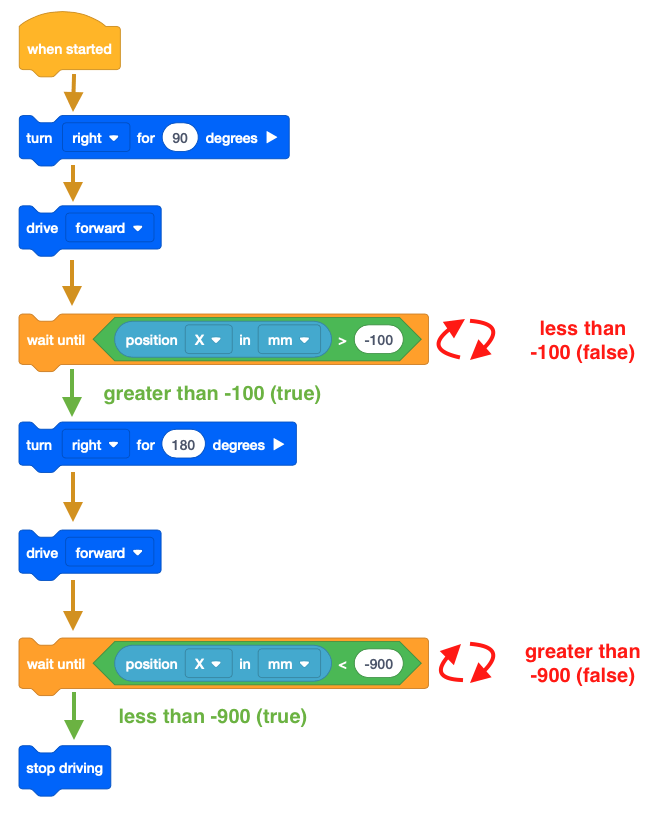
- En este proyecto, el robot VR conduce al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica. Dado que los valores X están disminuyendo a medida que el robot VR llega al número ‘1’, el proyecto utiliza un <Less than> bloque.
- El robot VR se detendrá una vez que su valor X sea menor que el valor X de la coordenada en la que está el número indicado. Dado que el valor X del número ‘1’ es -900, el Robot VR dejará de funcionar una vez que el valor X sea inferior a -900.
Para su información
Un bloque [Esperar] pausará el flujo del proyecto durante un período de tiempo específico en segundos antes de pasar al siguiente bloque de la pila. Se puede usar un bloque [Espera] para ayudar a observar comportamientos individuales en su proyecto que pueden ejecutarse rápidamente juntos, como moverse entre dos ubicaciones diferentes en un patio de recreo.

Uso de bloques de interruptores
La imagen a continuación muestra el bloque Cambiar [Esperar]. Tenga en cuenta que el valor numérico se escribe antes de la unidad de medida, separado por una coma.

Puede cambiar el parámetro de segundos a milisegundos escribiendo MSEC para reemplazar el parámetro de SEGUNDOS. Asegúrese de utilizar todas las letras mayúsculas al introducir el parámetro.

Seleccione el botón Siguiente para continuar con el resto de esta lección.