
Lição 2: Dirija para o número ‘1’
-
Agora, o robô VR voltará para o número ‘1’.

-
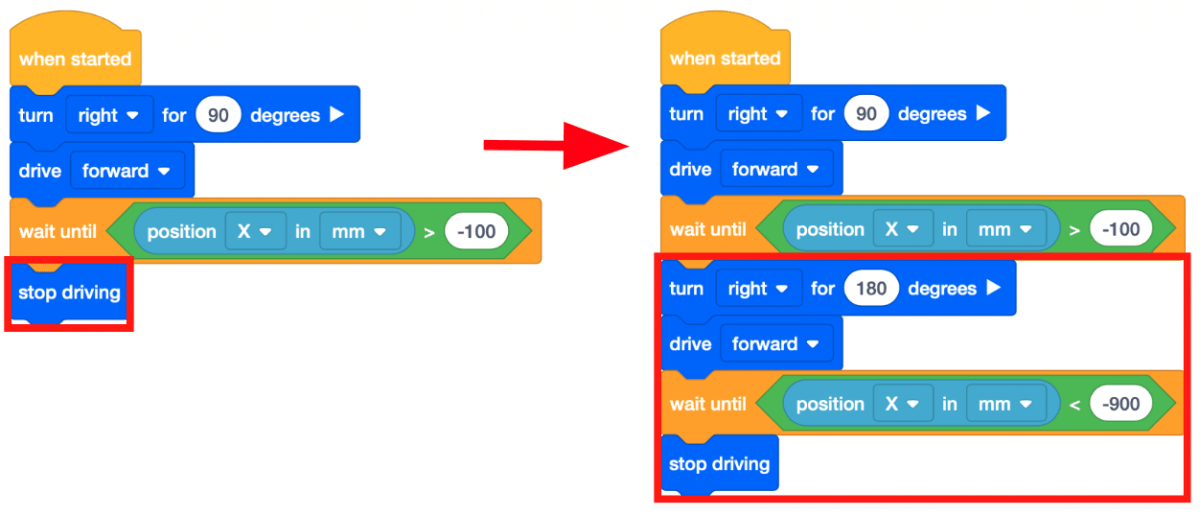
Para navegar o Robô VR de volta ao número ‘1’, remova o bloco [Stop driving] e substitua-o pelos blocos a seguir.
-
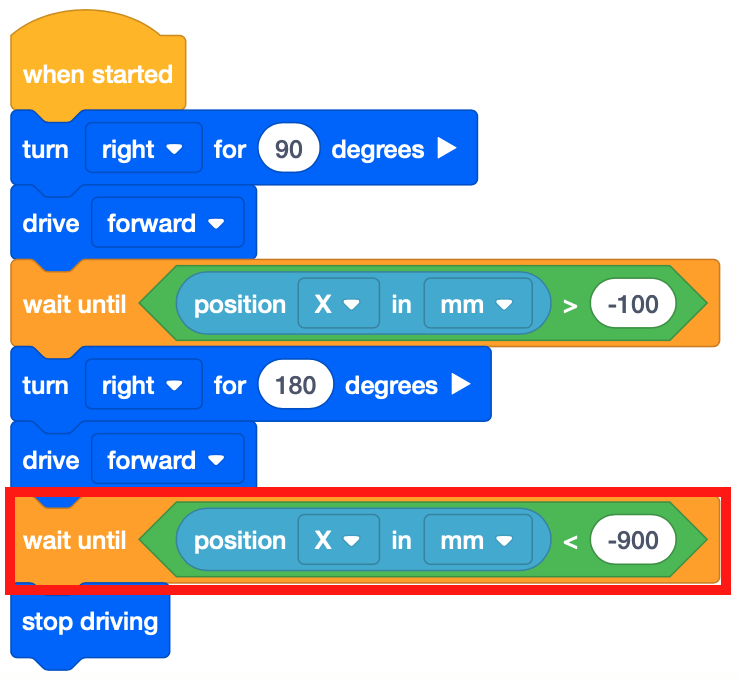
Observe que o segundo bloco [Aguarde até] contém um bloco <Less than> booleano em vez de um <Greater than> bloco. Isso ocorre porque o Robô VR está agora dirigindo pelo eixo X e os números estão se tornando mais negativos. O Robô VR irá parar quando os valores X forem INFERIORES a -900.
- Inicie o Number Grid Map Playground se ainda não estiver aberto e execute o projeto.
- Assista ao Robô VR dirigir para o número ‘1’ no Playground Number Grid Map.
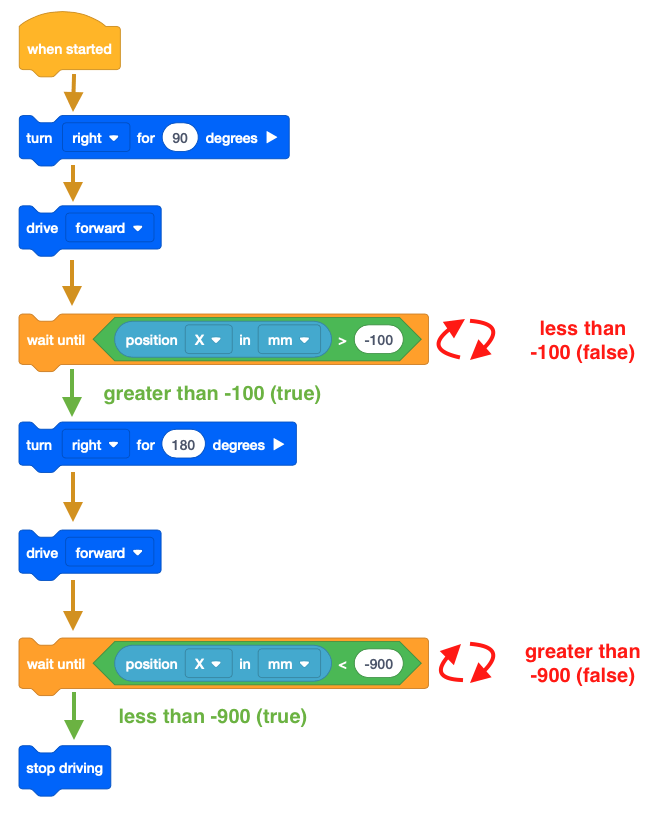
- Neste projeto, o Robô VR dirige para o número ‘1‘ no Playground do Mapa da Grade Numérica. Como os valores X estão diminuindo à medida que o Robô de RV passa para o número ‘1’, o projeto usa um <Less than> bloco.
- O Robô VR irá parar quando o seu valor X for menor que o valor X da coordenada em que o número indicado está ligado. Como o valor X do número ‘1’ é -900, o Robô VR parará de dirigir quando o valor X for inferior a -900.
Para sua informação
Um bloco [Wait] pausará o fluxo do projeto por um período de tempo específico em segundos antes de passar para o próximo bloco na pilha. Um bloco [Wait] pode ser usado para ajudar a observar comportamentos individuais em seu projeto que podem ser executados rapidamente juntos, como mover-se entre dois locais diferentes em um Playground.

Usando Blocos de Interruptor
A imagem abaixo exibe o bloco Switch [Aguarde]. Observe que o valor numérico é escrito antes da unidade de medida, separado por uma vírgula.

Você pode alterar o parâmetro de segundos para milissegundos digitando MSEC para substituir o parâmetro SECONDS. Certifique-se de usar todas as letras maiúsculas ao inserir o parâmetro.

Selecione o botão Seguinte para continuar com o resto desta lição.