
പാഠം 2: '1' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുക
-
ഇനി വി.ആർ. റോബോട്ട് '1' എന്ന നമ്പറിലേക്ക് തിരികെ പോകും.

-
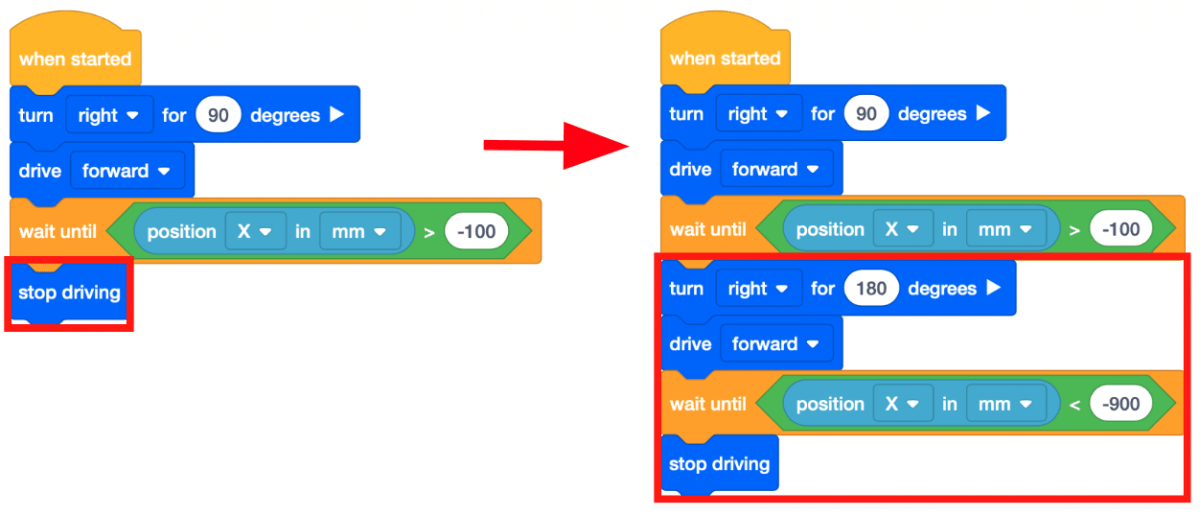
VR റോബോട്ടിനെ '1' എന്ന നമ്പറിലേക്ക് തിരികെ കൊണ്ടുപോകാൻ, [സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് നീക്കം ചെയ്ത് താഴെ പറയുന്ന ബ്ലോക്കുകൾ സ്ഥാപിക്കുക.
-
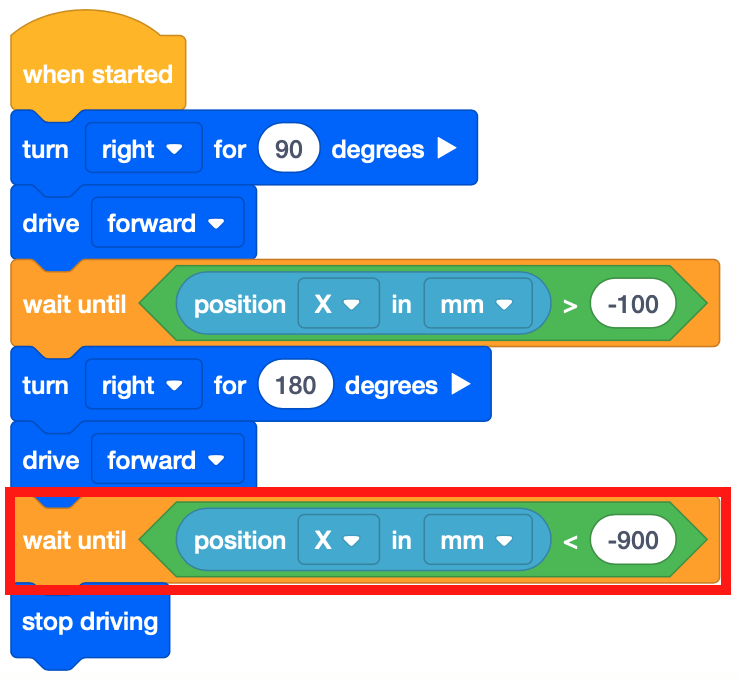
രണ്ടാമത്തെ [Wait until] ബ്ലോക്കിൽ <Greater than> ബ്ലോക്കിന് പകരം <Less than> ബൂളിയൻ ബ്ലോക്ക് ഉണ്ടെന്ന് ശ്രദ്ധിക്കുക. കാരണം, വിആർ റോബോട്ട് ഇപ്പോൾ എക്സ് അക്ഷത്തിലൂടെ താഴേക്ക് നീങ്ങുകയും സംഖ്യകൾ കൂടുതൽ നെഗറ്റീവ് ആയി മാറുകയും ചെയ്യുന്നു. X-മൂല്യങ്ങൾ -900-ൽ താഴെയാകുമ്പോൾ VR റോബോട്ട് നിർത്തും.
- നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ൽ '1' എന്ന നമ്പറിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക.
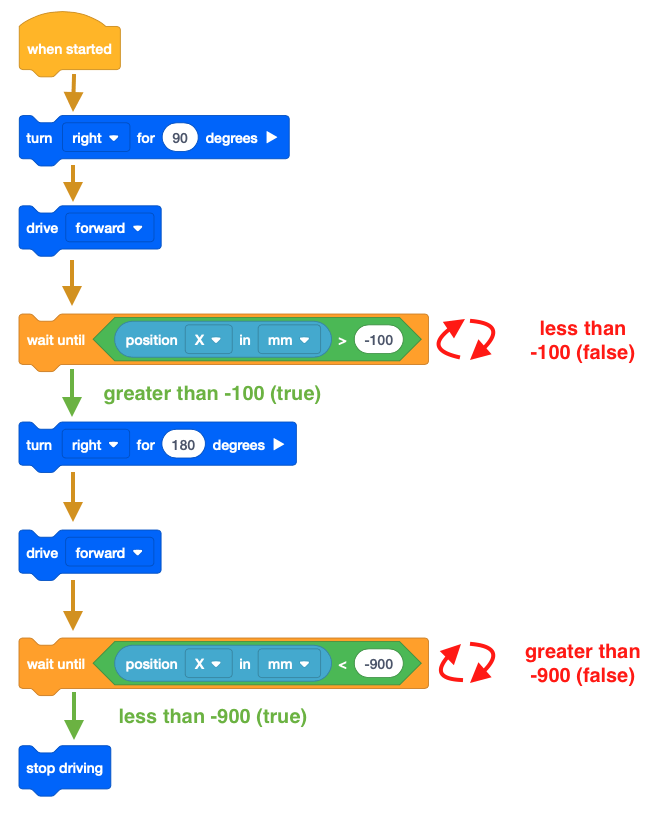
- ഈ പ്രോജക്റ്റിൽ, VR റോബോട്ട് നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ട്ലെ '1' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നു. VR റോബോട്ട് '1' എന്ന സംഖ്യയിലേക്ക് ഡ്രൈവ് X- മൂല്യങ്ങൾ കുറയുന്നതിനാൽ, പ്രോജക്റ്റ് ഒരു <Less than> ബ്ലോക്ക് ഉപയോഗിക്കുന്നു.
- സൂചിപ്പിച്ചിരിക്കുന്ന നമ്പർ ഓണായിരിക്കുന്ന കോർഡിനേറ്റിന്റെ X-മൂല്യത്തേക്കാൾ കുറഞ്ഞ് ആകുമ്പോൾ VR റോബോട്ട് നിർത്തും. '1' എന്ന സംഖ്യയുടെ X- മൂല്യം -900 ആയതിനാൽ, X- മൂല്യം -900-ൽ താഴെയാകുമ്പോൾ VR റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തും.
നിങ്ങളുടെ അറിവിലേക്കായി
ഒരു [കാത്തിരിക്കുക] ബ്ലോക്ക്, സ്റ്റാക്കിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നതിന് മുമ്പ്, സെക്കൻഡുകൾക്കുള്ളിൽ ഒരു നിശ്ചിത സമയത്തേക്ക് പ്രോജക്റ്റിന്റെ ഒഴുക്ക് താൽക്കാലികമായി നിർത്തും. നിങ്ങളുടെ പ്രോജക്റ്റിലെ വ്യക്തിഗത പെരുമാറ്റങ്ങൾ നിരീക്ഷിക്കാൻ സഹായിക്കുന്നതിന് ഒരു [വെയിറ്റ്] ബ്ലോക്ക് ഉപയോഗിക്കാം, അവ വേഗത്തിൽ ഒരുമിച്ച് പ്രവർത്തിക്കും, ഉദാഹരണത്തിന് ഒരു കളിസ്ഥലത്തെ രണ്ട് വ്യത്യസ്ത സ്ഥലങ്ങൾക്കിടയിൽ നീങ്ങുന്നത്.

സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
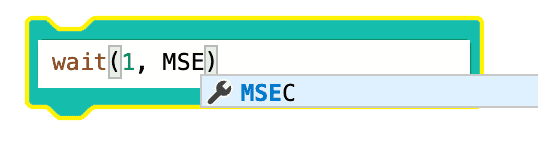
താഴെയുള്ള ചിത്രം സ്വിച്ച് [കാത്തിരിക്കുക] ബ്ലോക്ക് കാണിക്കുന്നു. അളവെടുപ്പ് യൂണിറ്റിന് മുമ്പായി സംഖ്യാ മൂല്യം എഴുതിയിരിക്കുന്നു, അത് കോമയാൽ വേർതിരിച്ചിരിക്കുന്നു എന്നത് ശ്രദ്ധിക്കുക.
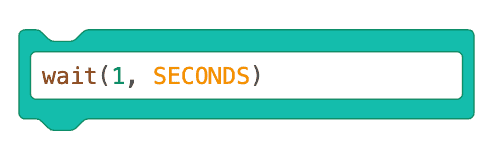
SECONDS പാരാമീറ്റർ മാറ്റിസ്ഥാപിക്കാൻ MSEC എന്ന് ടൈപ്പ് ചെയ്തുകൊണ്ട് നിങ്ങൾക്ക് പാരാമീറ്റർ സെക്കൻഡിൽ നിന്ന് മില്ലിസെക്കൻഡിലേക്ക് മാറ്റാം. പാരാമീറ്റർ നൽകുമ്പോൾ എല്ലാ വലിയ അക്ഷരങ്ങളും ഉപയോഗിക്കാൻ ശ്രദ്ധിക്കുക.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.