الدرس 2: تغيير المعلمات في كتلة [Drive for]
لم يلمس روبوت الواقع الافتراضي القلعة المركزية في المشروع الأخير. يحتاج إلى السفر لمسافة أبعد. اضبط المعلمة الأمامية، واختبرها، وشاهد روبوت الواقع الافتراضي يطرق القلعة المركزية!
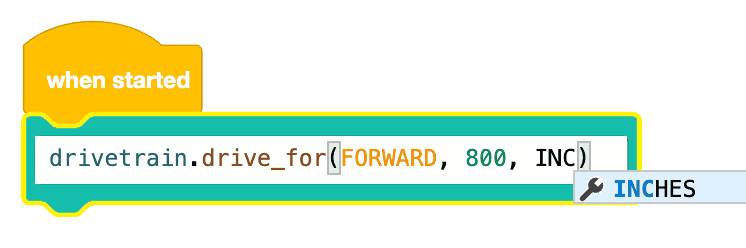
- اضبط المسافة التي سيتحركها روبوت الواقع الافتراضي عن طريق إدخال القيمة 800 في كتلة [Drive for].
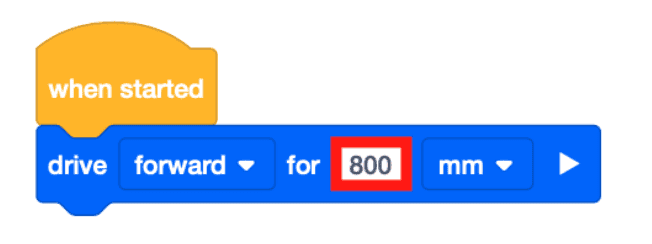
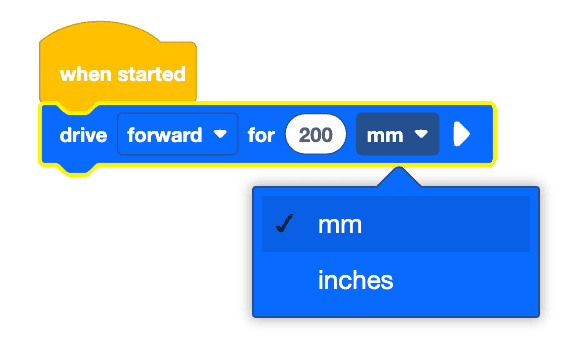
يمكن لكتلة [Drive for] قبول الكسور العشرية أو الأعداد الصحيحة أو الكتل الرقمية. يمكن أيضًا تغيير الوحدات من ملليمتر (مم) إلى بوصة.
استخدام كتل المفاتيح
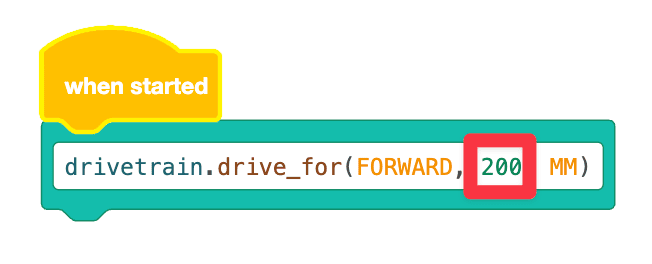
لتغيير وحدات قياس كتلة Switch [Drive for] من ملليمتر إلى بوصة، اكتب فوق "MM" واستبدل هذه الوحدة بكلمة "بوصة". تأكد من كتابة وحدات القياس في جميع الأحرف الكبيرة. أثناء كتابة وحدة القياس الجديدة، سيظهر اقتراح للمعلمة. يمكنك متابعة الكتابة لملء الأمر. يمكنك أيضًا الضغط على مفتاح الإدخال أو مفتاح التبويب، أو النقر على الاقتراح لملء الأمر.
-
ابدأ المشروع.

-
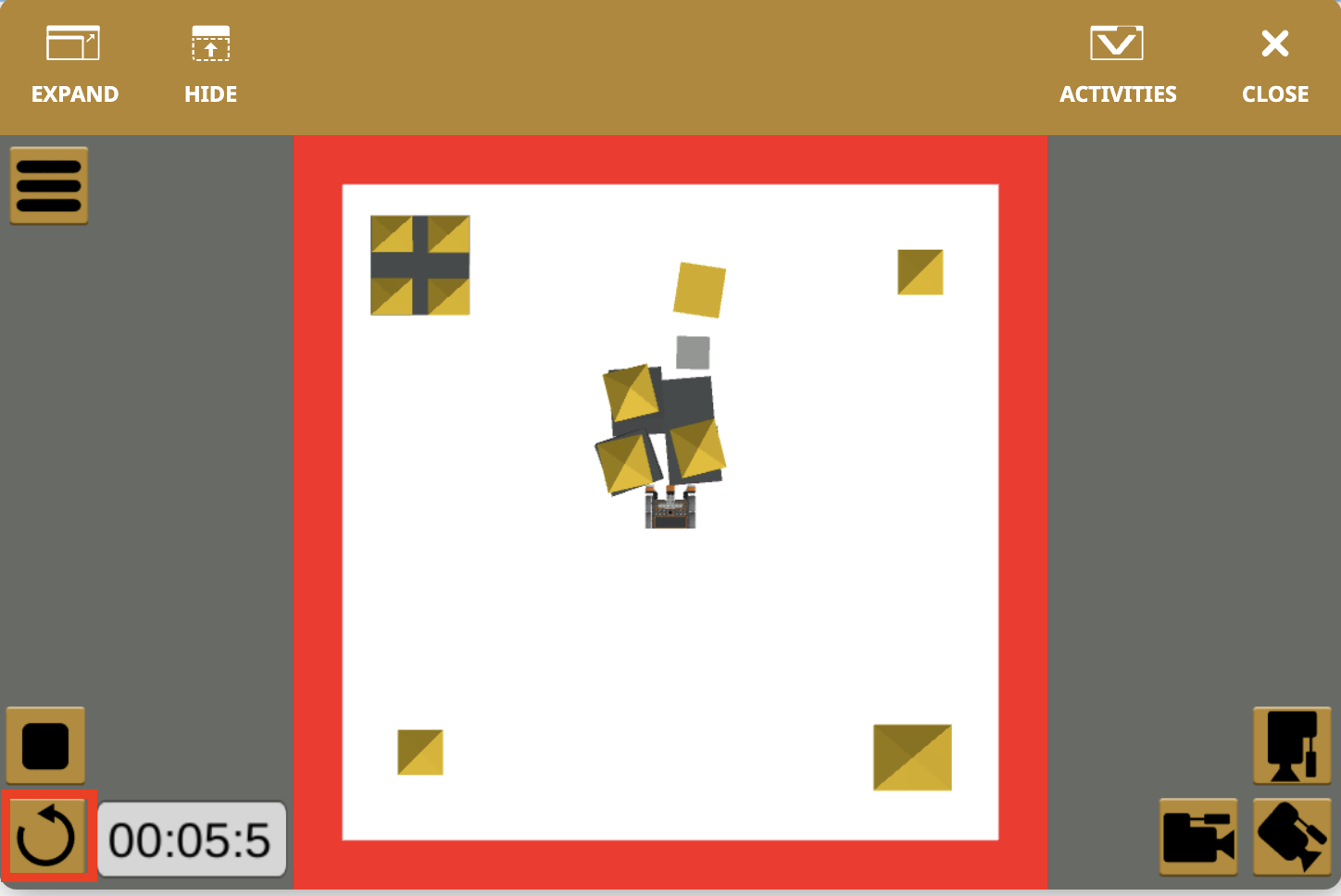
سوف يصطدم روبوت الواقع الافتراضي بالقلعة المركزية ويطرق أجزاء منها.

-
اختر زر "إعادة الضبط" لإعادة ضبط الملعب.
يحتاج روبوت الواقع الافتراضي الآن إلى العودة إلى نقطة البداية. استخدم كتلة [Drive for] إضافية وقم بتغيير المعلمات لجعلها تدفع في الاتجاه المعاكس للعودة إلى وضع البداية.
-
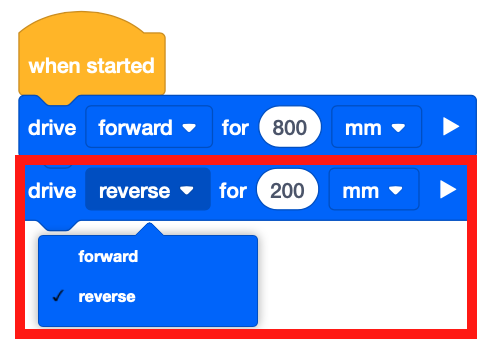
أضف كتلة [Drive for] ثانية إلى مشروع VEXcode VR، وقم بتغيير الاتجاه من "للأمام" إلى "للخلف".
-
تأكد من أن قيمة المسافة هي نفس قيمة كتلة [Drive for] الأولى، 800 ملليمتر (مم)، حتى تعود إلى وضع البداية.

-
حدد زر "ابدأ" وقم بتشغيل المشروع.

-
سيتحرك روبوت الواقع الافتراضي للأمام والخلف لمسافة 800 ملليمتر (مم)، ويعود إلى وضع البداية.

ملاحظة: لقد أكملت بنجاح الجزء الأول من تحدي Castle Crasher! حتى لو لم يتم هدم جميع الأجزاء الأربعة للقلعة المركزية بالكامل، إذا كانت نازحة قليلاً، فهذا مقبول.
لمعلوماتك
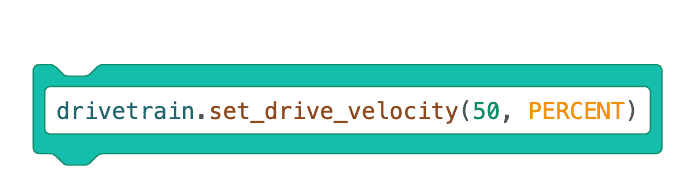
لجعل روبوت الواقع الافتراضي يتحرك للأمام وللخلف بسرعات مختلفة، يمكنك زيادة أو تقليل سرعة القيادة باستخدام كتلة [ضبط سرعة القيادة]. تقبل كتلة [ضبط سرعة القيادة] نطاقًا من 0 ٪ إلى 100 ٪. السرعة الافتراضية هي 50 ٪. سيتم تطبيق تغيير السرعة على أي أوامر مجموعة نقل الحركة اللاحقة.
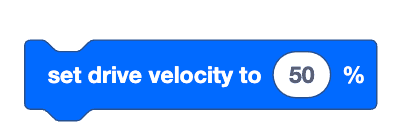
هذا هو كتلة التبديل [ضبط سرعة المحرك]. لاحظ أنه عند استخدام أوامر بايثون، تتم كتابة المعلمة العددية دائمًا قبل الوحدة (النسبة المئوية)، مفصولة بفاصلة.
احفظ مشروعك
لحفظ مشروعك، حدد "حفظ إلى جهازك" في القائمة المنسدلة "ملف".
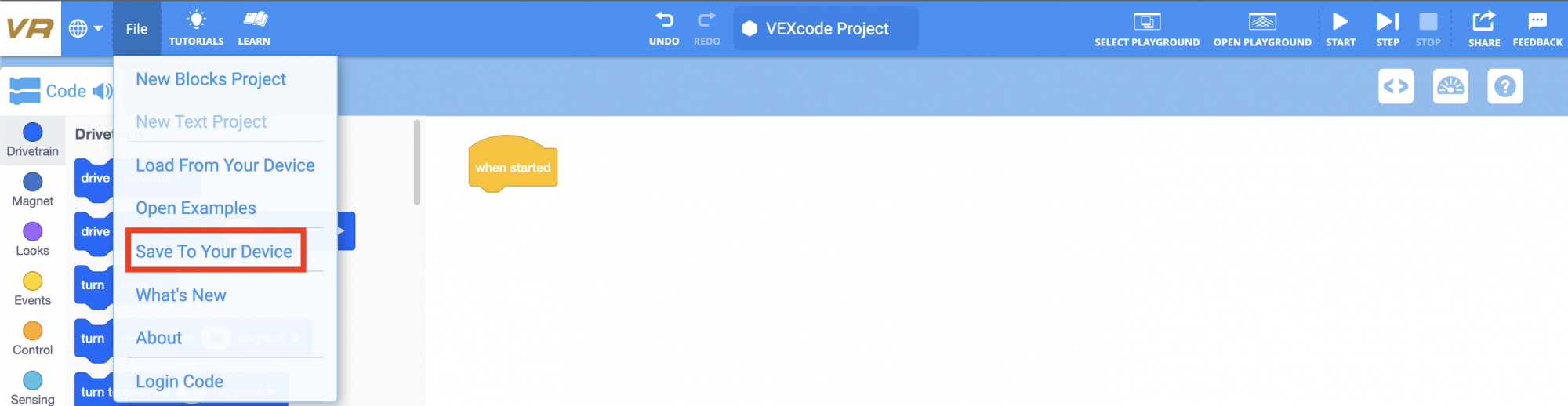
بمجرد الحفظ، سيظهر المشروع في مجلد التنزيلات على جهازك كملف .vrblocks.
استخدام كتل المفاتيح
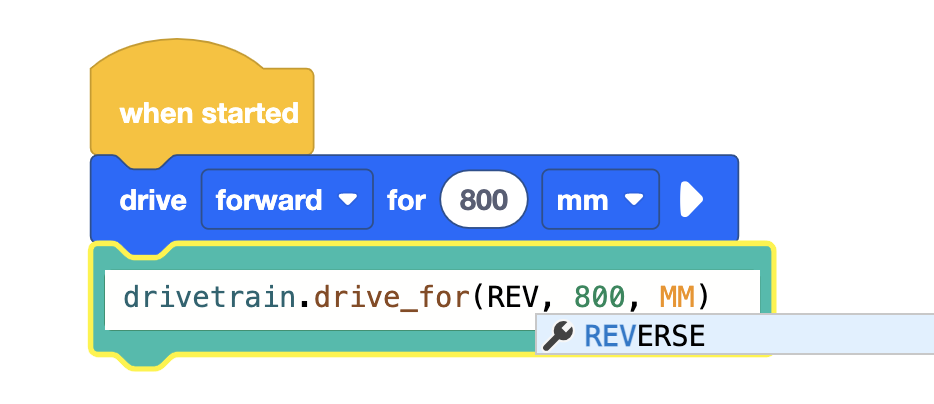
لتغيير اتجاه القيادة من الأمام إلى الخلف أثناء استخدام كتلة التبديل، اكتب كلمة "عكس" بين قوسين.

سيظهر اقتراح للمعلمة العكسية. يمكنك النقر على هذا الاقتراح أو الضغط على مفتاح الإدخال أو التبويب لملء المعلمة. تأكد من تعيين معلمة المسافة إلى 800 مم لمطابقة المعلمة المستخدمة في مشروع هذا الدرس.