
Lektion 2: Parameter im Block [Antrieb für] ändern
Der VR-Roboter hat im letzten Projekt die Mittelburg nicht berührt. Es muss weiter reisen. Passen Sie den Vorwärtsparameter an, testen Sie ihn und beobachten Sie, wie der VR-Roboter die mittlere Burg umstößt!
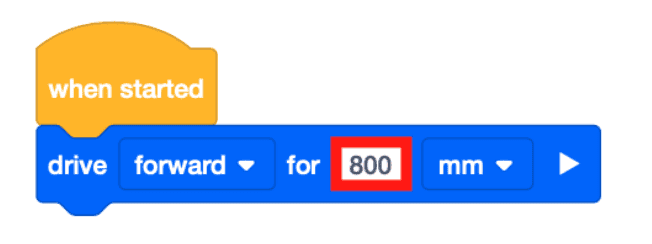
- Stellen Sie die Entfernung ein, um die sich der VR-Roboter bewegt, indem Sie den Wert 800 in den Block [Drive for] eingeben.
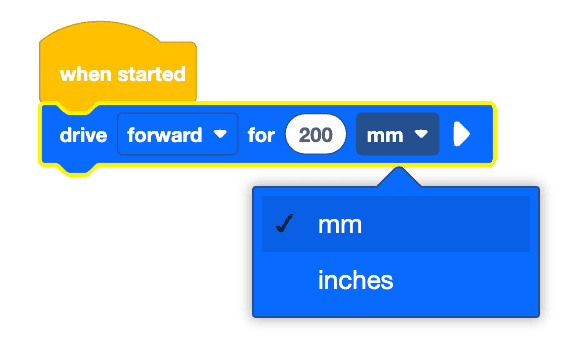
Der Block [Drive for] kann Dezimalzahlen, ganze Zahlen oder numerische Blöcke akzeptieren. Die Einheiten können auch von Millimeter (mm) auf Zoll geändert werden.
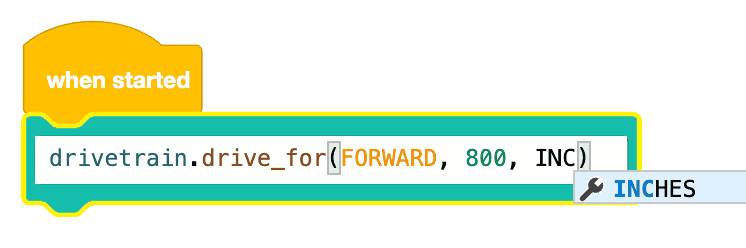
Verwenden von Schalterblöcken
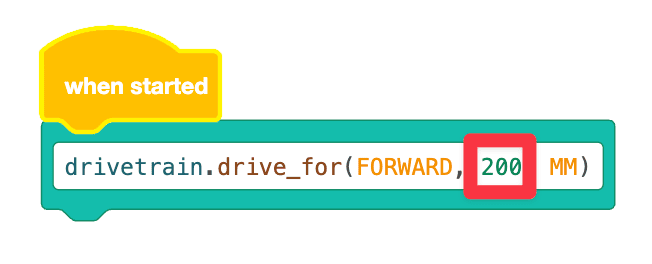
Um die Maßeinheiten des Blocks Schalter [Antrieb für] von Millimeter auf Zoll zu ändern, geben Sie "MM" ein und ersetzen Sie diese Einheit durch das Wort "ZOLL". Stellen Sie sicher, dass Sie Maßeinheiten in Großbuchstaben eingeben. Wenn Sie die neue Maßeinheit eingeben, wird ein Vorschlag für den Parameter angezeigt. Sie können mit der Eingabe fortfahren, um den Befehl auszufüllen. Sie können auch die Eingabetaste oder die Tabulatortaste drücken oder auf den Vorschlag klicken, um den Befehl auszufüllen.
-
Starten Sie das Projekt.

-
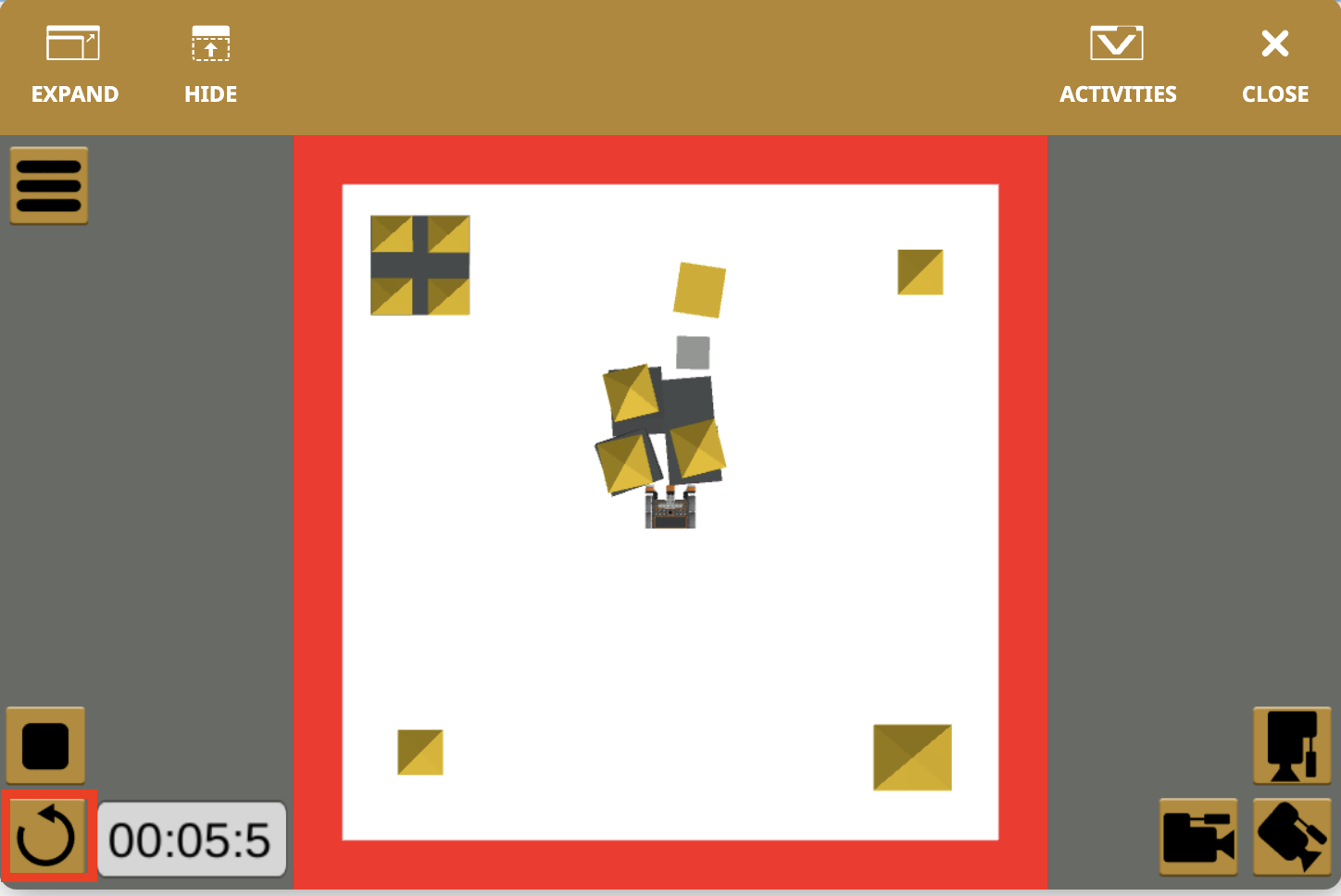
Der VR-Roboter kollidiert mit der mittleren Burg und stößt Teile davon um.

-
Wählen Sie die Schaltfläche "Reset", um den Spielplatz zurückzusetzen.
Der VR-Roboter muss nun in die Ausgangsposition zurückkehren. Verwenden Sie einen zusätzlichen [Drive for] -Block und ändern Sie die Parameter, damit er rückwärts fährt, um in die Ausgangsposition zurückzukehren.
-
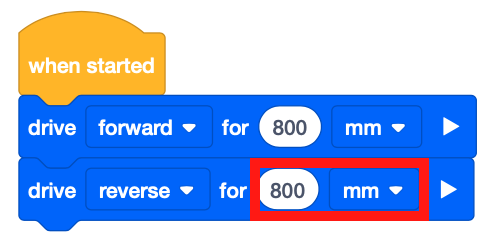
Fügen Sie dem VEXcode VR-Projekt einen zweiten [Drive for] -Block hinzu und ändern Sie die Richtung von „Vorwärts“ zu „Rückwärts“.

-
Stellen Sie sicher, dass der Abstandswert der gleiche ist wie beim ersten [Drive for] -Block, 800 Millimeter (mm), damit er in die Ausgangsposition zurückkehrt.
-
Wählen Sie die Schaltfläche „Start“ und führen Sie das Projekt aus.

-
Der VR-Roboter bewegt sich 800 Millimeter (mm) vorwärts und rückwärts und kehrt in die Ausgangsposition zurück.

Hinweis: Du hast den ersten Teil der Castle-Crasher-Herausforderung erfolgreich abgeschlossen! Auch wenn nicht alle vier Teile der Mittelburg vollständig umgestürzt sind, wenn sie leicht versetzt sind, ist das akzeptabel.
Zur Kenntnisnahme
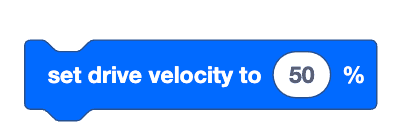
Um einen VR-Roboter mit unterschiedlichen Geschwindigkeiten vorwärts und rückwärts fahren zu lassen, können Sie die Antriebsgeschwindigkeit mit dem Block [Antriebsgeschwindigkeit einstellen] erhöhen oder verringern. Der Block [Antriebsgeschwindigkeit einstellen] akzeptiert einen Bereich von 0 % - 100 %. Die Standardgeschwindigkeit beträgt 50 %. Das Ändern der Geschwindigkeit gilt für alle nachfolgenden Drivetrain-Befehle.
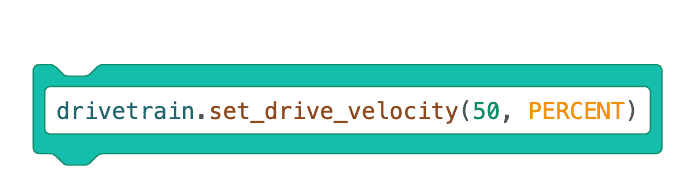
Dies ist der Schalter [Antriebsgeschwindigkeit einstellen] -Block. Beachten Sie, dass bei der Verwendung von Python-Befehlen der numerische Parameter immer vor der Einheit (PROZENT) geschrieben wird, getrennt durch ein Komma.
Speichern Sie Ihr Projekt
Um Ihr Projekt zu speichern, wählen Sie im Dropdown-Menü „Datei“ „Auf Ihrem Gerät speichern“.
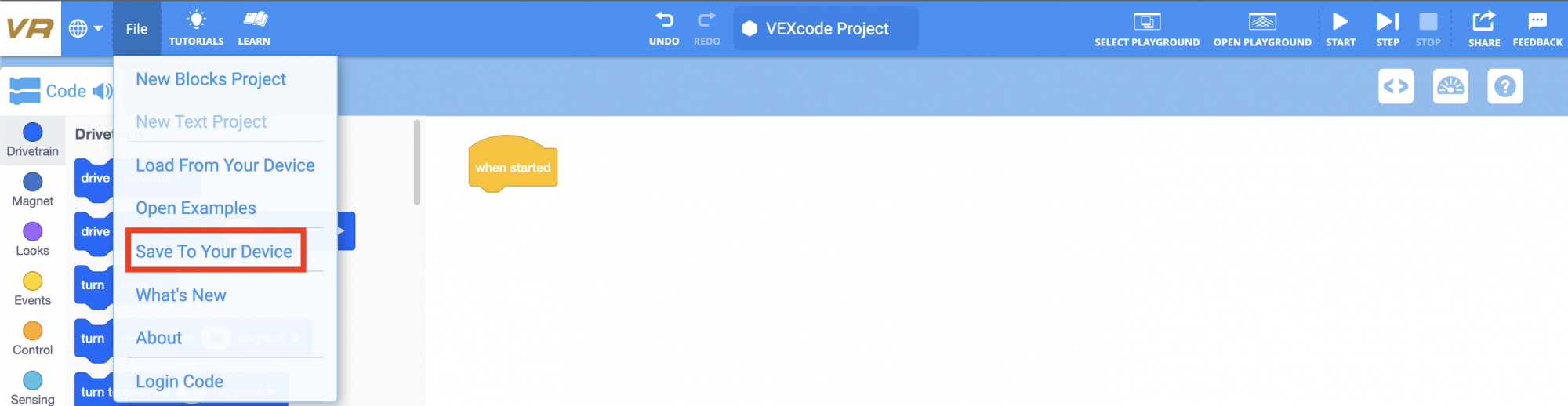
Nach dem Speichern wird das Projekt im Ordner Downloads Ihres Geräts als .vrblocks-Datei angezeigt.
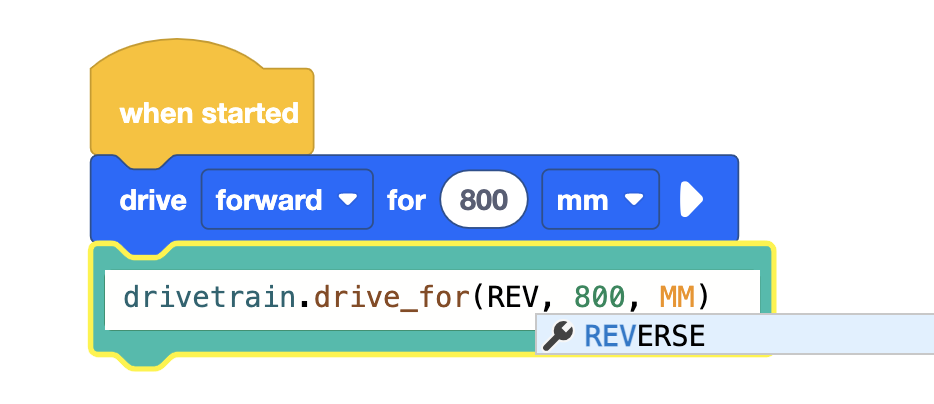
Verwenden von Schalterblöcken
Um die Fahrtrichtung während der Verwendung eines Schalterblocks von Vorwärts nach Rückwärts zu ändern, geben Sie das Wort "RÜCKWÄRTS" in die Klammern ein.

Für den UMGEKEHRTEN Parameter wird ein Vorschlag angezeigt. Sie können auf diesen Vorschlag klicken oder die Enter- oder Tab-Taste drücken, um den Parameter auszufüllen. Stellen Sie sicher, dass Sie den Abstandsparameter auf 800 mm setzen , um mit dem im Projekt dieser Lektion verwendeten Parameter übereinzustimmen.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf