
Leçon 2 : Modifier les paramètres dans le bloc [Drive for]
Le robot VR n'a pas touché le château central dans le dernier projet. Il doit voyager plus loin. Ajustez le paramètre avant, testez-le et regardez le robot VR renverser le château central !
- Réglez la distance que le robot VR se déplacera en entrant la valeur 800 dans le bloc [Drive for].
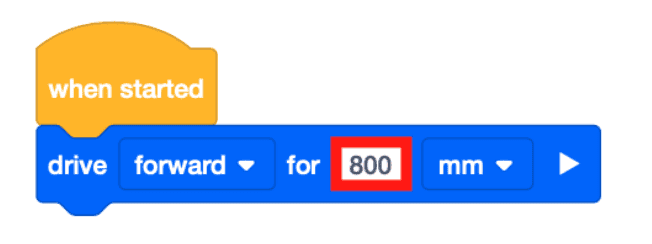
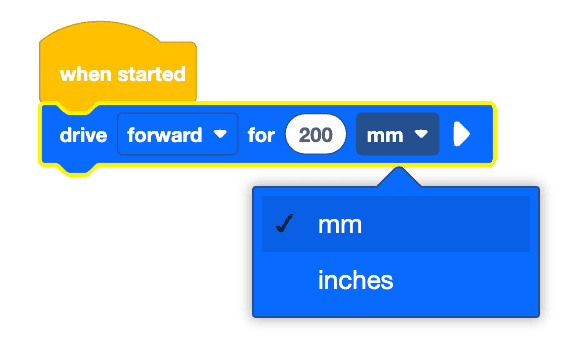
Le bloc [Drive for] peut accepter des décimales, des entiers ou des blocs numériques. Les unités peuvent également être changées de millimètres (mm) en pouces.
Utilisation des blocs de commutation
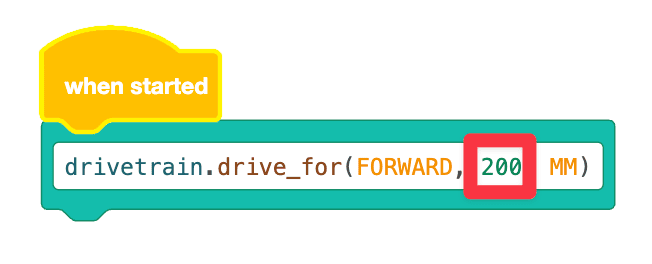
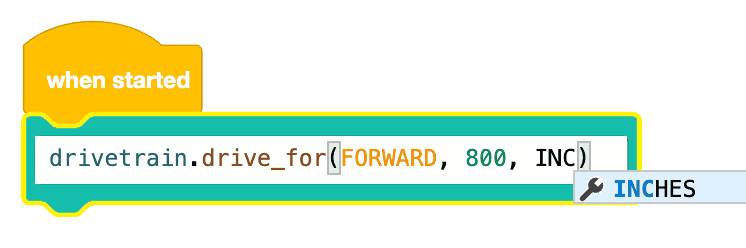
Pour changer les unités de mesure du bloc Switch [Drive for] de millimètres en pouces, tapez « MM » et remplacez cette unité par le mot « POUCES ». Assurez-vous de taper les unités de mesure dans toutes les lettres majuscules. Au fur et à mesure que vous saisissez la nouvelle unité de mesure, une suggestion pour le paramètre apparaîtra. Vous pouvez continuer à taper pour remplir la commande. Vous pouvez également appuyer sur la touche Entrée ou la touche Tabulation, ou cliquer sur la suggestion pour renseigner la commande.
-
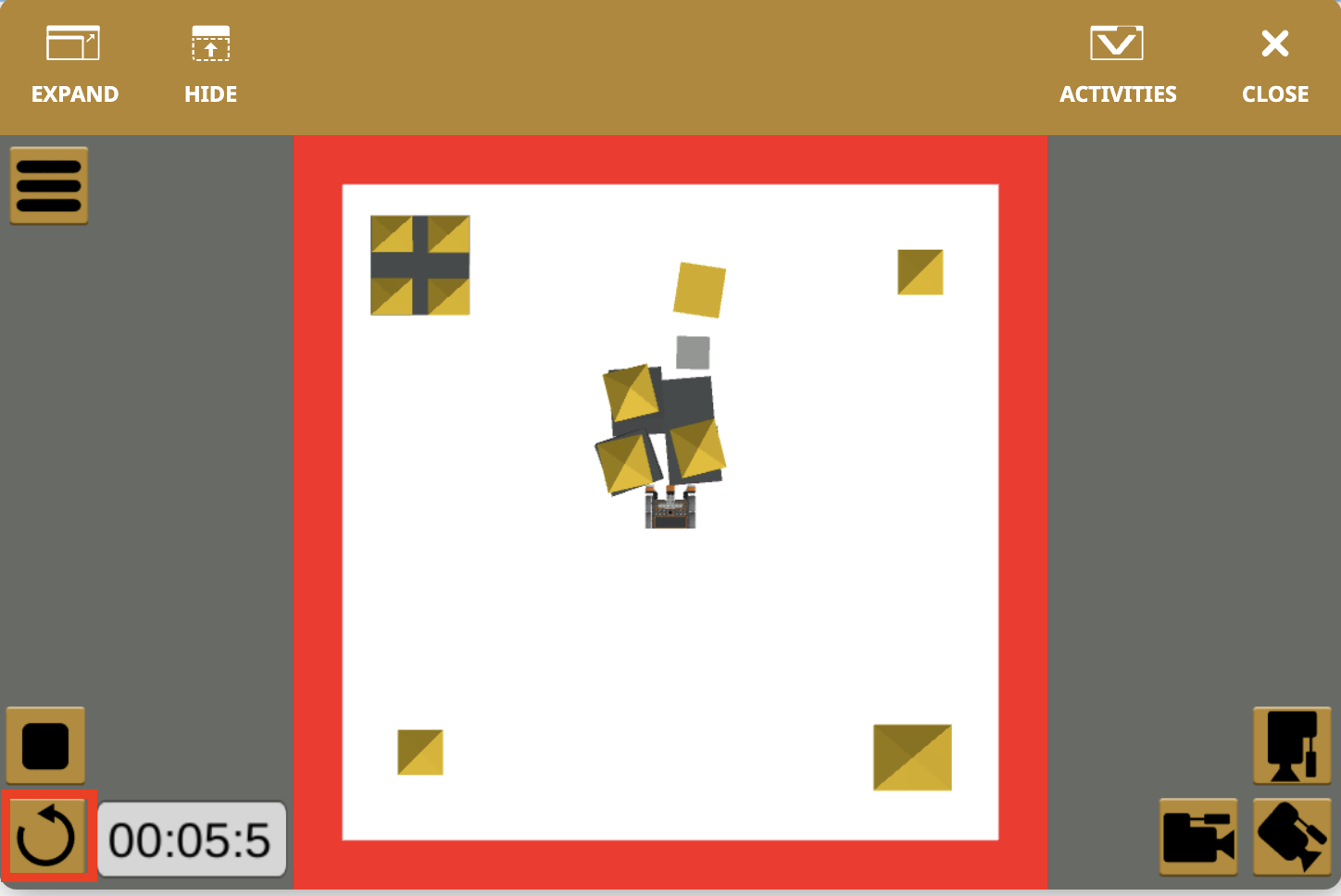
Démarrez le projet.

-
Le robot VR entrera en collision avec le château central et en renversera certaines parties.

-
Sélectionnez le bouton « Réinitialiser » pour réinitialiser le terrain de jeu.
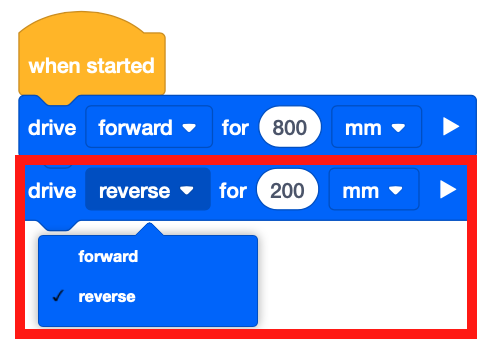
Le robot VR doit maintenant revenir à la position de départ. Utilisez un bloc [Drive for] supplémentaire et modifiez les paramètres pour le faire rouler en marche arrière pour revenir à la position de départ.
-
Ajoutez un deuxième bloc [Drive for] au projet VEXcode VR et changez la direction de « forward » à « reverse ».
-
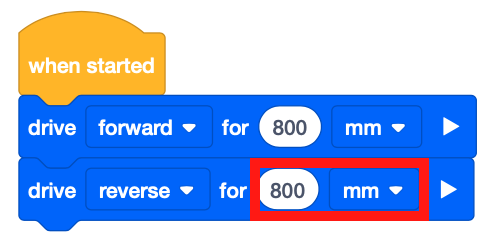
Assurez-vous que la valeur de la distance est la même que celle du premier bloc [Drive for], 800 millimètres (mm), afin qu'il revienne à la position de départ.
-
Sélectionnez le bouton « Démarrer » et exécutez le projet.

-
Le robot VR se déplacera vers l'avant et vers l'arrière sur 800 millimètres (mm), revenant à la position de départ.

Remarque: vous avez terminé avec succès la première partie du Castle Crasher Challenge ! Même si les quatre parties du château central ne sont pas complètement renversées, si elles sont légèrement déplacées, c'est acceptable.
Pour votre information
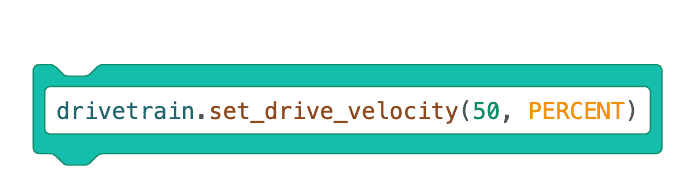
Pour faire avancer et reculer un robot VR à différentes vitesses, vous pouvez augmenter ou diminuer la vitesse d'entraînement à l'aide du bloc [Définir la vitesse d'entraînement]. Le bloc [Définir la vitesse d'entraînement] accepte une plage de 0 % à 100 %. La vitesse par défaut est de 50 %. La modification de la vitesse s'appliquera à toutes les commandes ultérieures du groupe motopropulseur.
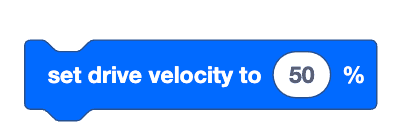
Il s'agit du bloc Switch [Set drive velocity]. Notez que lorsque vous utilisez des commandes Python, le paramètre numérique est toujours écrit avant l'unité (POURCENTAGE), séparé par une virgule.
Enregistrer votre projet
Pour enregistrer votre projet, sélectionnez « Enregistrer sur votre appareil » dans le menu déroulant « Fichier ».
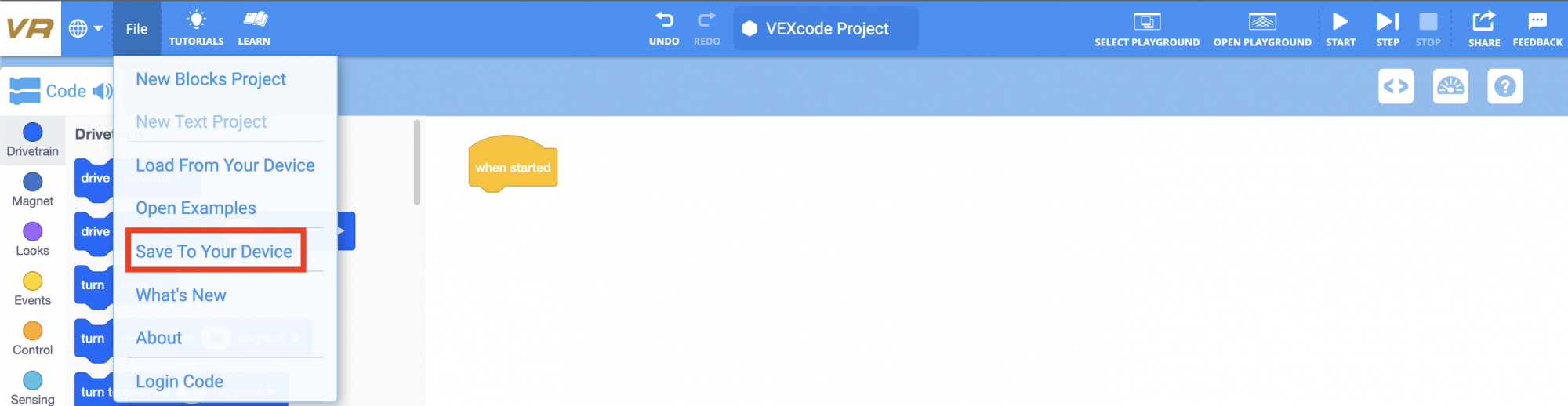
Une fois enregistré, le projet apparaîtra dans le dossier Téléchargements de votre appareil sous la forme d'un fichier .vrblocks.
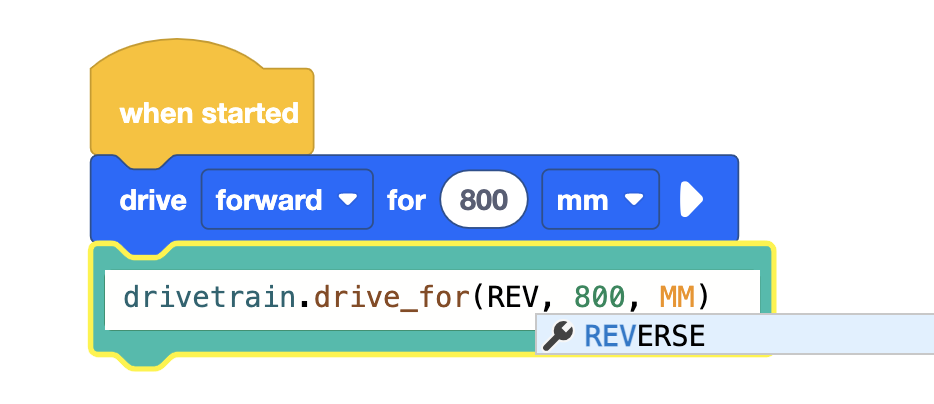
Utilisation des blocs de commutation
Pour changer le sens de conduite d'avant en arrière tout en utilisant un bloc de commutation, tapez le mot « MARCHE ARRIÈRE » entre parenthèses.

Une suggestion apparaîtra pour le paramètre INVERSE. Vous pouvez cliquer sur cette suggestion ou appuyer sur la touche Entrée ou Tabulation pour renseigner le paramètre. Assurez-vous de définir le paramètre de distance à 800 MM pour qu'il corresponde au paramètre utilisé dans le projet de cette leçon.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf