
Lição 2: Alterar Parâmetros no Bloco [Drive for]
O Robô VR não tocou no castelo central no último projeto. Ele precisa viajar mais longe. Ajuste o parâmetro forward, teste-o e observe o robô VR derrubar o castelo central!
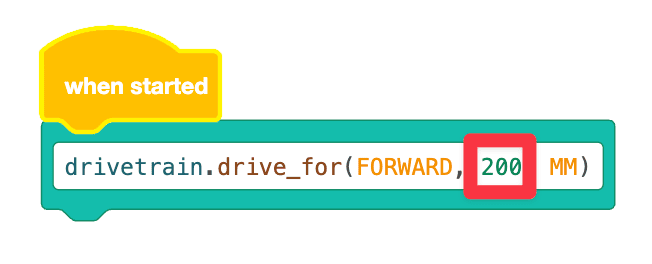
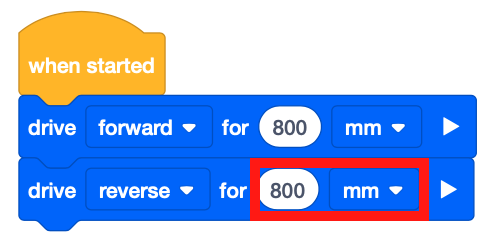
- Defina a distância que o Robô VR se moverá inserindo o valor 800 no bloco [Drive for].

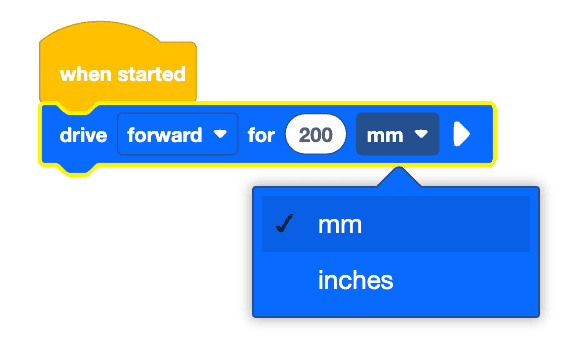
O bloco [Drive for] pode aceitar decimais, inteiros ou blocos numéricos. As unidades também podem ser alteradas de milímetros (mm) para polegadas.
Usando Blocos de Interruptor
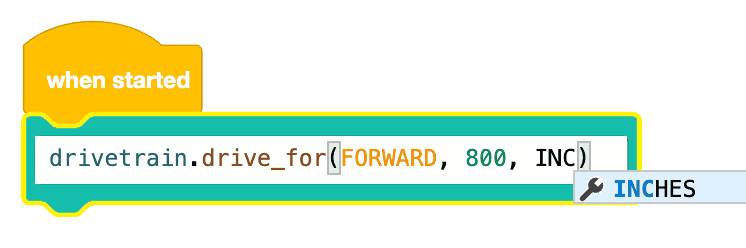
Para alterar as unidades de medida do bloco Switch [Drive for] de milímetros para polegadas, digite "MM" e substitua esta unidade pela palavra "POLEGADAS". Certifique-se de digitar unidades de medida em letras maiúsculas. À medida que você digita a nova unidade de medida, uma sugestão para o parâmetro aparecerá. Pode continuar a escrever para preencher o comando. Você também pode pressionar a tecla Enter ou a tecla Tab ou clicar na sugestão para preencher o comando.
-
Iniciar o projeto.

-
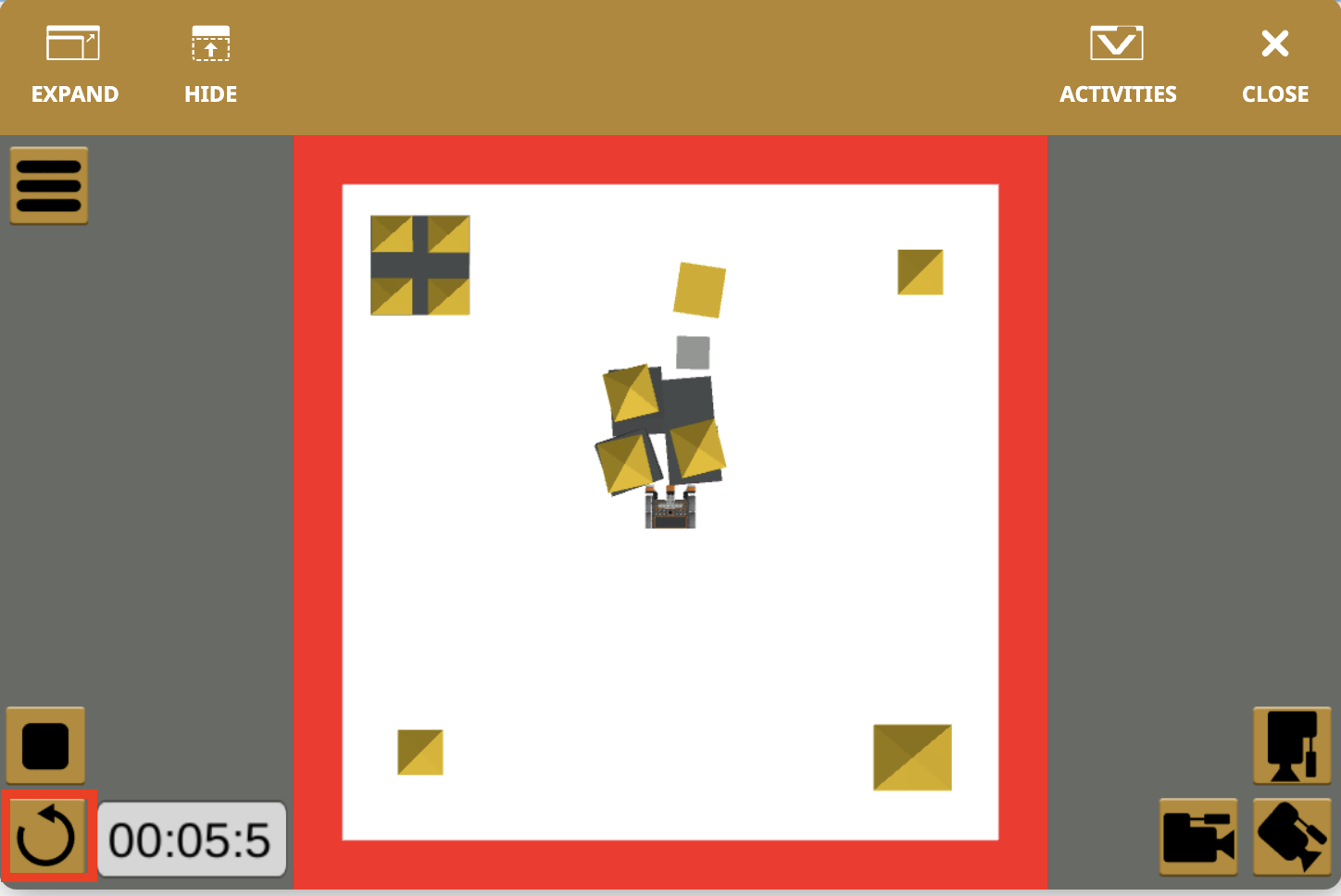
O Robô de RV colidirá com o castelo central e derrubará partes dele.

-
Selecione o botão "Reset" para reiniciar o Playground.
O Robô VR agora precisa retornar à posição inicial. Use um bloco [Drive for] adicional e altere os parâmetros para que ele conduza em sentido inverso para retornar à posição inicial.
-
Adicione um segundo bloco [Drive for] ao projeto VEXcode VR e altere a direção de "para frente" para "para trás".

-
Certifique-se de que o valor da distância seja o mesmo do primeiro bloco [Drive for], 800 milímetros (mm), para que ele retorne à posição inicial.
-
Seleccione o botão "Iniciar" e execute o projecto.

-
O Robô VR se moverá para frente e para trás por 800 milímetros (mm), retornando à posição inicial.

Nota: Você concluiu com sucesso a primeira parte do Desafio Castle Crasher! Mesmo que todas as quatro partes do castelo central não sejam completamente derrubadas, se estiverem ligeiramente deslocadas, isso é aceitável.
Para sua informação
Para fazer um robô VR dirigir para frente e para trás em diferentes velocidades, você pode aumentar ou diminuir a velocidade da unidade usando o bloco [Set drive velocity]. O bloco [Set drive velocity] aceita um intervalo de 0% a 100%. A velocidade padrão é de 50%. A alteração da velocidade será aplicada a quaisquer comandos subsequentes do sistema de transmissão.
Este é o bloco Switch [Set drive velocity]. Observe que, ao usar comandos Python, o parâmetro numérico é sempre escrito antes da unidade (PORCENTAGEM), separado por uma vírgula.
Guardar o seu projeto
Para guardar o seu projeto, selecione "Guardar no seu dispositivo" no menu suspenso "Ficheiro".
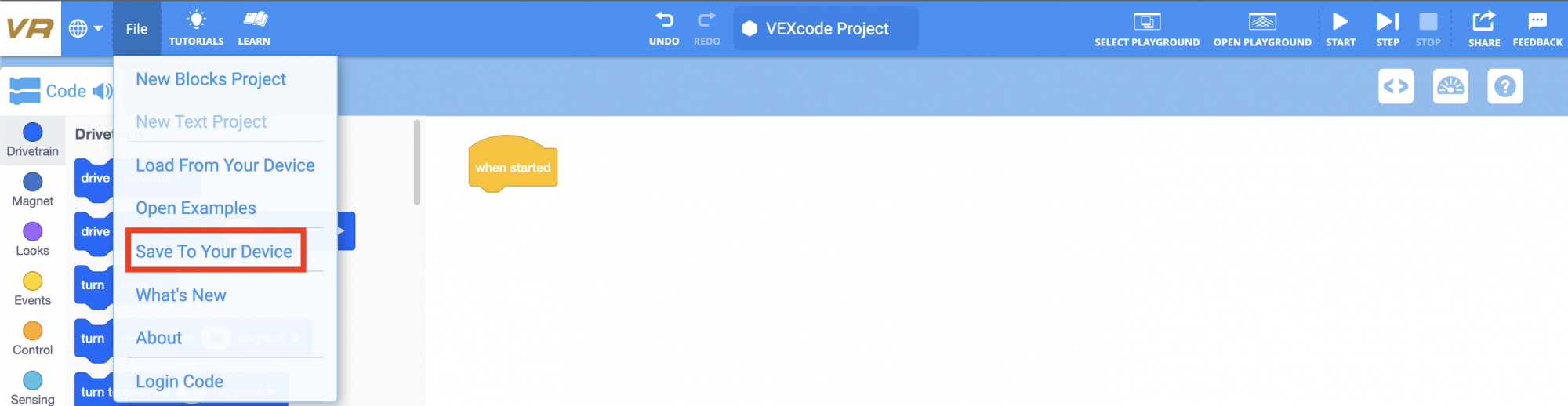
Depois de salvo, o projeto aparecerá na pasta Downloads do seu dispositivo como um arquivo .vrblocks.
Usando Blocos de Interruptor
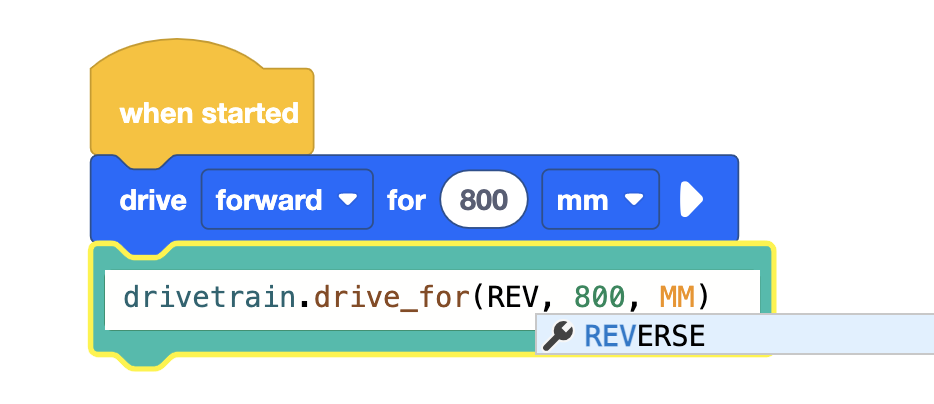
Para alterar a direção de condução de para frente para trás ao usar um bloco de Interruptor, digite a palavra "REVERSO" entre parênteses.

Uma sugestão aparecerá para o parâmetro REVERSO. Você pode clicar nesta sugestão ou pressionar a tecla Enter ou Tab para preencher o parâmetro. Certifique-se de definir o parâmetro de distância para 800 MM para corresponder ao parâmetro usado no projeto desta lição.
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf