레슨 2: [Drive for] 블록의 매개변수 변경
VR 로봇은 지난 프로젝트에서 중앙 성을 건드리지 않았습니다. 더 멀리까지 이동해야 합니다. 전방 매개변수를 조정하고 테스트한 후, VR 로봇이 중앙의 성을 무너뜨리는 모습을 지켜보세요!
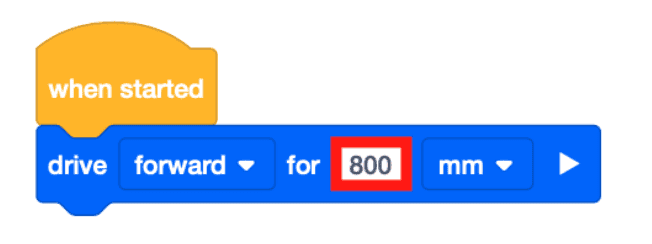
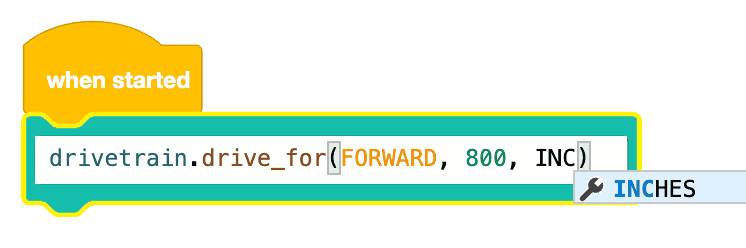
- [주행거리] 블록에 800 값을 입력하여 VR 로봇이 이동할 거리를 설정합니다.
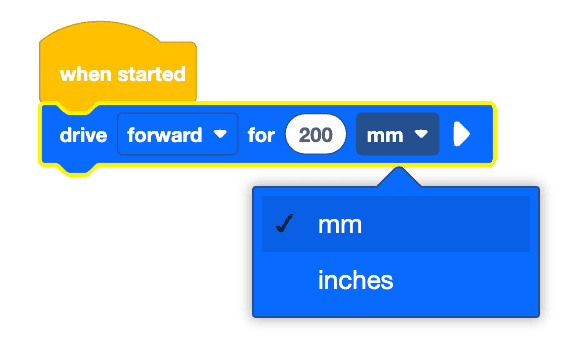
[Drive for] 블록은 소수, 정수 또는 숫자 블록을 허용할 수 있습니다. 단위는 밀리미터(mm)에서 인치로 변경할 수도 있습니다.
스위치 블록 사용
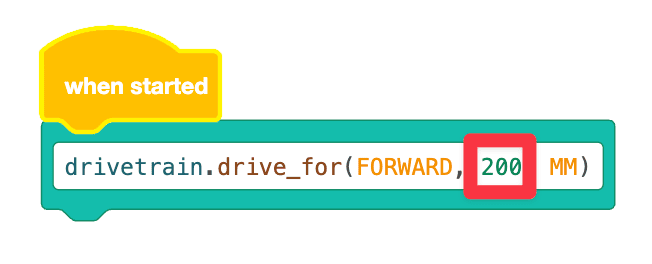
스위치 [구동] 블록의 측정 단위를 밀리미터에서 인치로 변경하려면 "MM" 위에 입력하고 이 단위를 "INCHES"로 바꾸세요. 측정 단위는 모두 대문자로 입력해야 합니다. 새로운 측정 단위를 입력하면 매개변수에 대한 제안이 나타납니다. 명령을 입력하여 계속 입력할 수 있습니다. Enter 키나 Tab 키를 누르거나 제안을 클릭하여 명령을 채울 수도 있습니다.
-
프로젝트를 시작합니다.

-
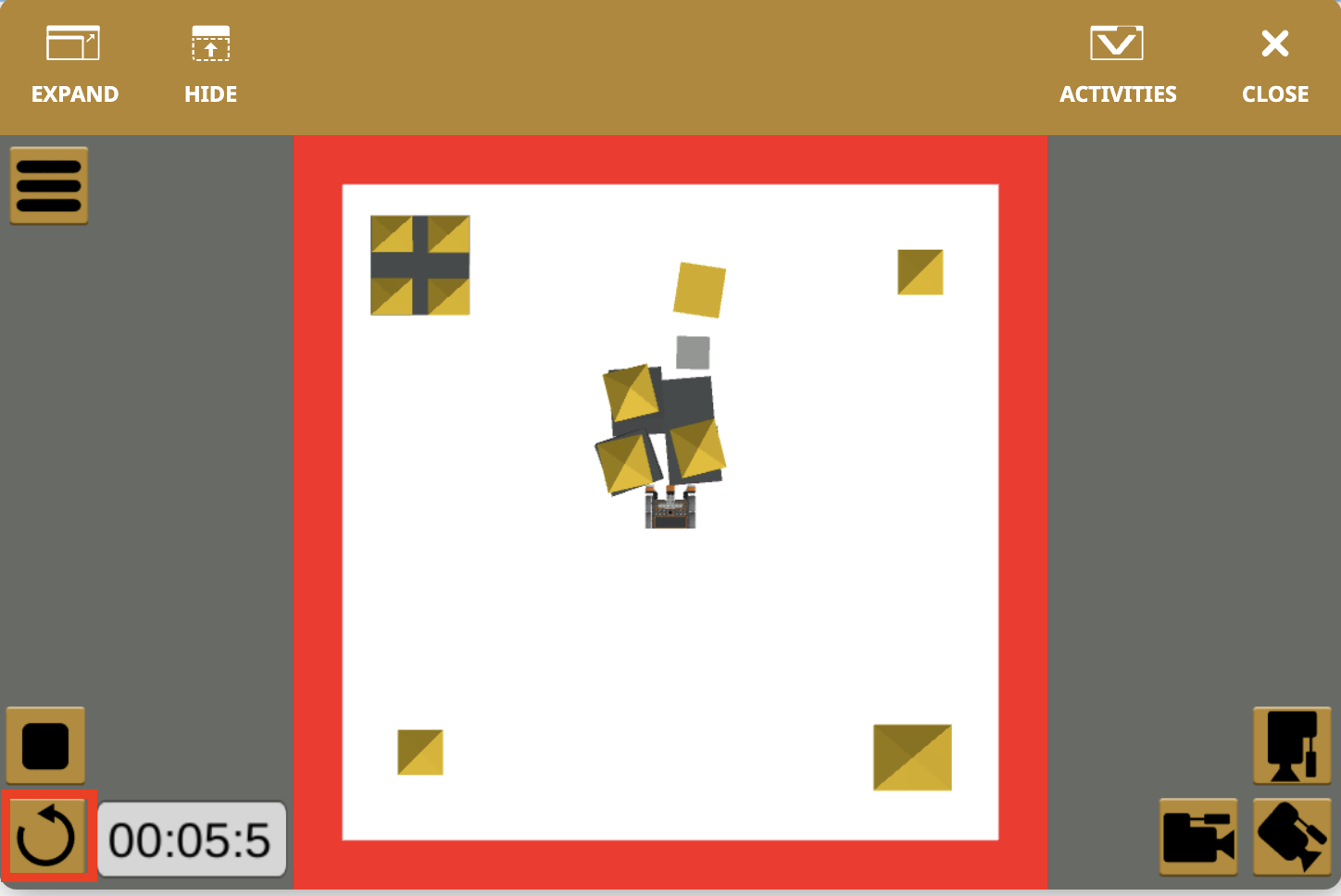
VR 로봇은 중앙의 성과 충돌하여 성의 일부를 쓰러뜨립니다.

-
놀이터를 재설정하려면 "재설정" 버튼을 선택하세요.
이제 VR 로봇은 시작 위치로 돌아가야 합니다. [구동] 블록을 추가로 사용하여 매개변수를 변경하여 역방향으로 구동하여 시작 위치로 돌아가도록 합니다.
-
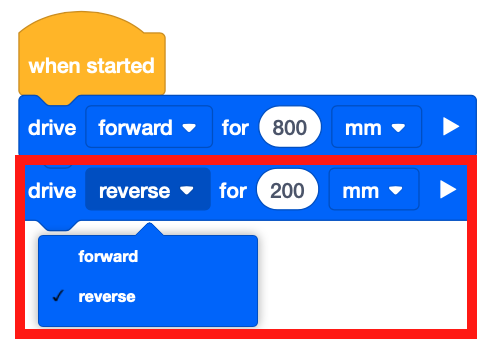
VEXcode VR 프로젝트에 두 번째 [Drive for] 블록을 추가하고 방향을 "앞으로"에서 "뒤로"로 변경합니다.
-
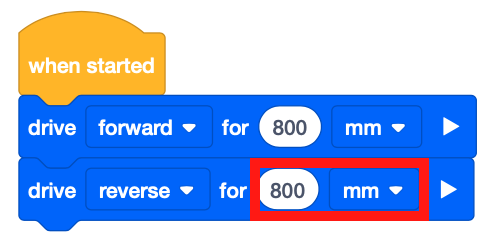
블록이 시작 위치로 돌아가려면 거리 값이 첫 번째 [구동] 블록과 동일한 800밀리미터(mm)인지 확인하세요.
-
"시작" 버튼을 선택하고 프로젝트를 실행합니다.

-
VR 로봇은 800밀리미터(mm) 동안 앞뒤로 이동한 후 시작 위치로 돌아갑니다.

참고: Castle Crasher 챌린지의 첫 번째 부분을 성공적으로 완료했습니다! 중앙 성의 네 부분이 모두 완전히 무너지지 않았더라도 약간 옮겨진 정도는 허용 가능합니다.
귀하의 정보를 위해
VR 로봇을 다른 속도로 전진 및 후진시키려면 [구동 속도 설정] 블록을 사용하여 구동 속도를 높이거나 낮출 수 있습니다. [드라이브 속도 설정] 블록은 0% - 100%의 범위를 허용합니다. 기본 속도는 50%입니다. 속도를 변경하면 이후의 모든 Drivetrain 명령에 적용됩니다.
이것은 스위치[구동 속도 설정] 블록입니다. Python 명령을 사용할 때 숫자 매개변수는 항상 단위(PERCENT) 앞에 쓰고 쉼표로 구분합니다.
프로젝트 저장
프로젝트를 저장하려면 '파일' 드롭다운 메뉴에서 '장치에 저장'을 선택하세요.
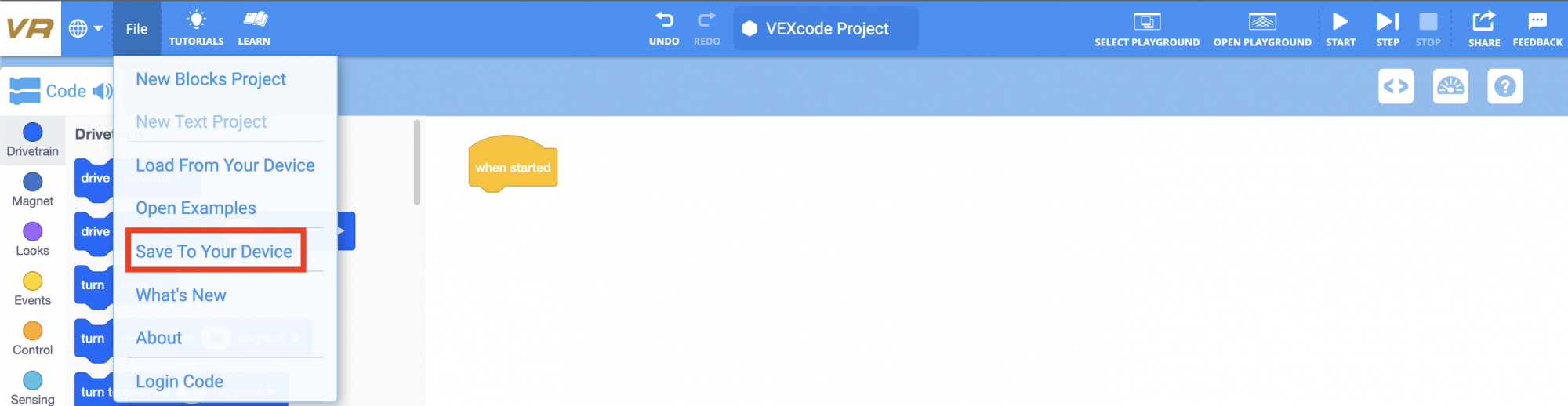
저장하면 프로젝트가 장치의 다운로드 폴더에 .vrblocks 파일로 나타납니다.
스위치 블록 사용
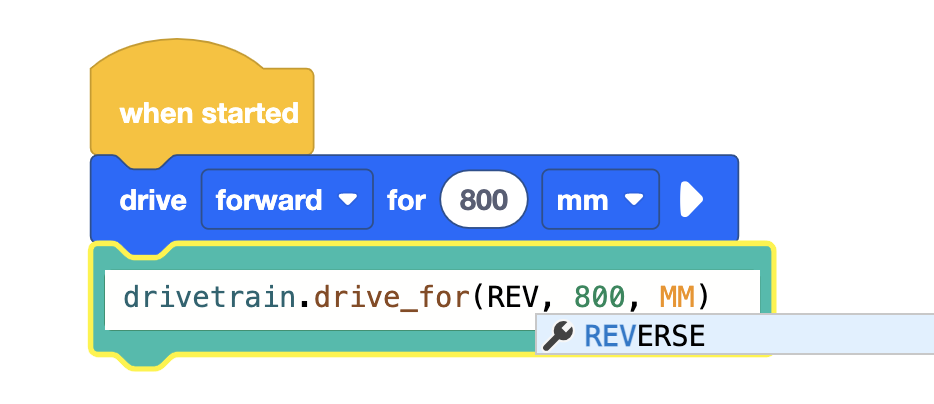
스위치 블록을 사용하는 동안 주행 방향을 전진에서 후진으로 변경하려면 괄호 안에 "REVERSE"라는 단어를 입력하세요.

REVERSE 매개변수에 대한 제안이 나타납니다. 이 제안을 클릭하거나 Enter 또는 Tab 키를 눌러 매개변수를 입력하세요. 이 수업 프로젝트에서 사용된 매개변수와 일치하도록 거리 매개변수를 800 MM 로 설정해야 합니다.