
പാഠം 2: [ഡ്രൈവ് ഫോർ] ബ്ലോക്കിലെ പാരാമീറ്ററുകൾ മാറ്റുക
കഴിഞ്ഞ പ്രോജക്റ്റിൽ വിആർ റോബോട്ട് സെന്റർ കോട്ടയിൽ തൊട്ടില്ല. അതിന് കൂടുതൽ ദൂരം സഞ്ചരിക്കേണ്ടതുണ്ട്. ഫോർവേഡ് പാരാമീറ്റർ ക്രമീകരിക്കുക, അത് പരീക്ഷിക്കുക, വിആർ റോബോട്ട് മധ്യഭാഗത്തെ കോട്ടയിൽ തട്ടി വീഴുന്നത് കാണുക!
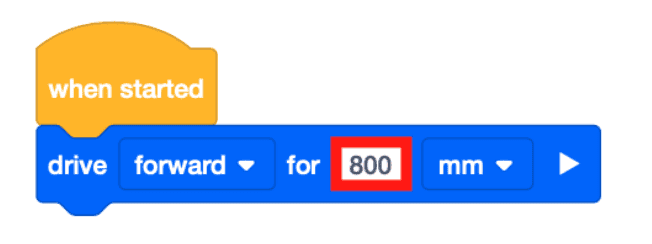
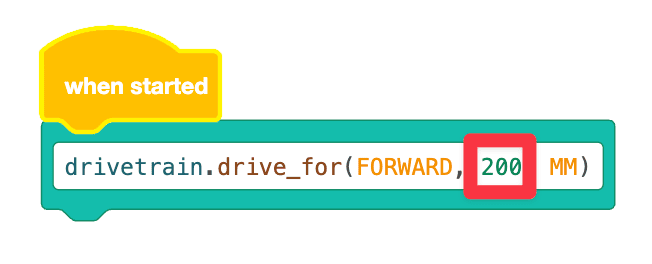
- [Drive for] ബ്ലോക്കിൽ 800 എന്ന മൂല്യം നൽകി VR റോബോട്ട് നീങ്ങേണ്ട ദൂരം സജ്ജമാക്കുക.
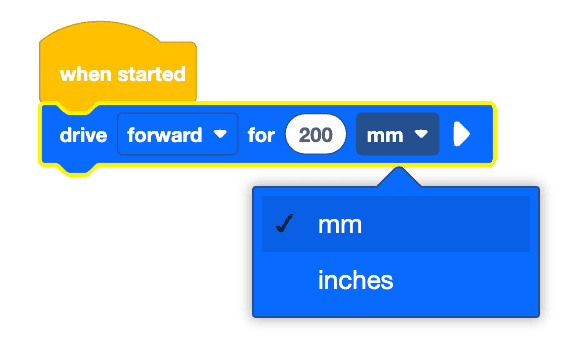
[Drive for] ബ്ലോക്കിന് ദശാംശങ്ങൾ, പൂർണ്ണസംഖ്യകൾ അല്ലെങ്കിൽ സംഖ്യാ ബ്ലോക്കുകൾ സ്വീകരിക്കാൻ കഴിയും. യൂണിറ്റുകൾ മില്ലിമീറ്ററിൽ (മില്ലീമീറ്റർ) നിന്ന് ഇഞ്ചിലേക്ക് മാറ്റാനും കഴിയും.
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
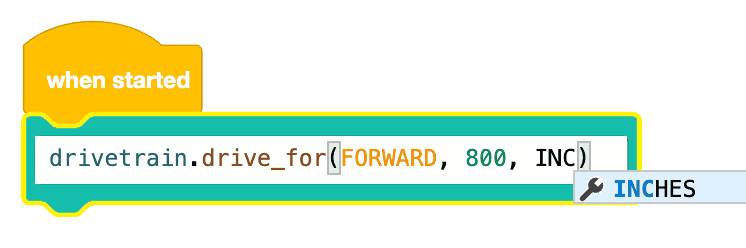
സ്വിച്ച് [ഡ്രൈവ് ഫോർ] ബ്ലോക്കിന്റെ അളവെടുപ്പ് യൂണിറ്റുകൾ മില്ലിമീറ്ററിൽ നിന്ന് ഇഞ്ചിലേക്ക് മാറ്റാൻ, "MM" എന്ന് ടൈപ്പ് ചെയ്ത് ഈ യൂണിറ്റിന് പകരം "INCHES" എന്ന വാക്ക് ഉപയോഗിക്കുക. അളവെടുപ്പിന്റെ യൂണിറ്റുകൾ എല്ലാം വലിയ അക്ഷരങ്ങളിൽ ടൈപ്പ് ചെയ്യുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക. നിങ്ങൾ പുതിയ അളവെടുപ്പ് യൂണിറ്റ് ടൈപ്പ് ചെയ്യുമ്പോൾ, പാരാമീറ്ററിനുള്ള നിർദ്ദേശം ദൃശ്യമാകും. കമാൻഡ് പൂരിപ്പിക്കുന്നതിന് നിങ്ങൾക്ക് ടൈപ്പ് ചെയ്യുന്നത് തുടരാം. കമാൻഡ് പോപ്പുലേറ്റ് ചെയ്യുന്നതിന് നിങ്ങൾക്ക് എന്റർ കീയോ ടാബ് കീയോ അമർത്താം, അല്ലെങ്കിൽ നിർദ്ദേശത്തിൽ ക്ലിക്ക് ചെയ്യാം.
-
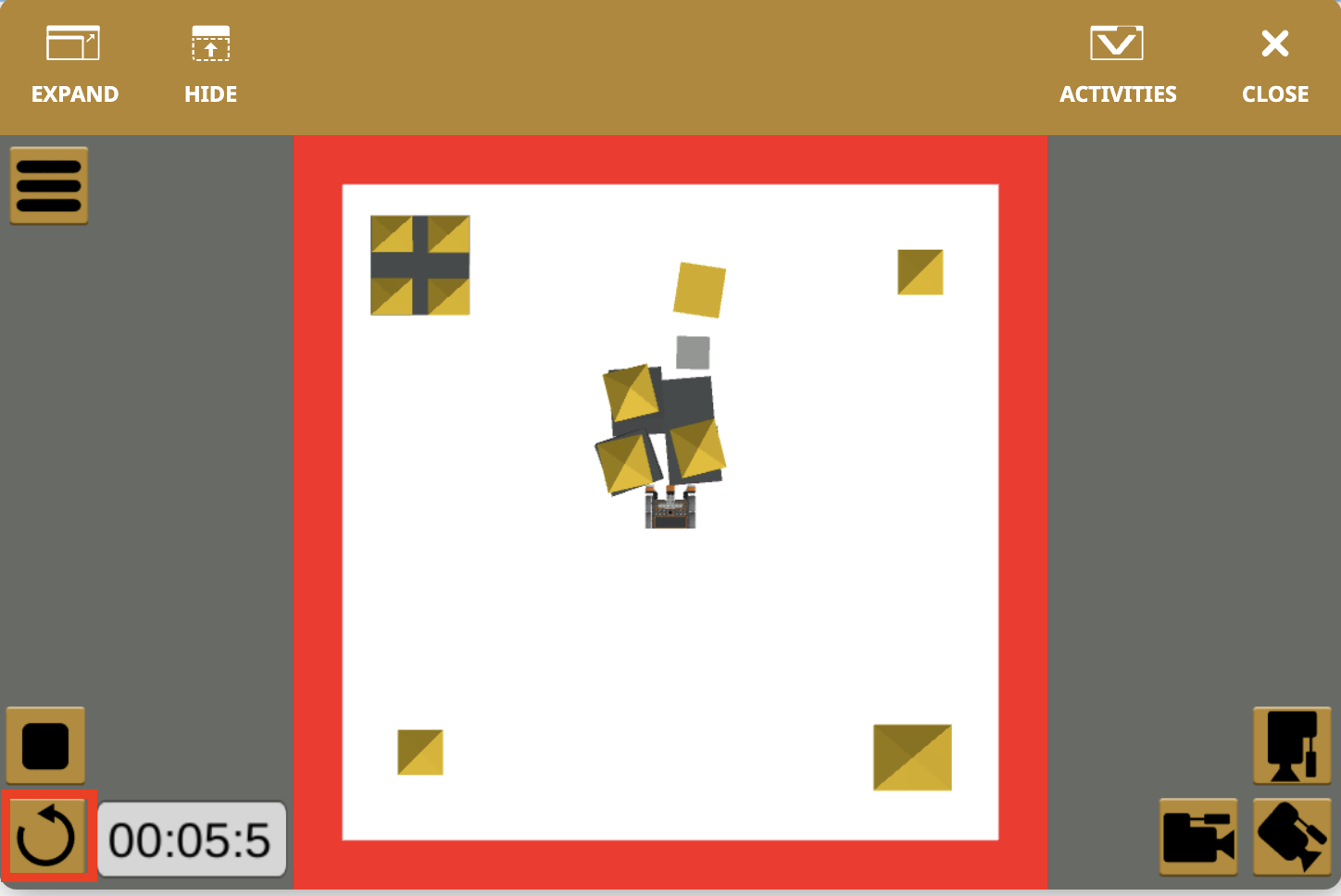
പദ്ധതി ആരംഭിക്കുക.

-
വിആർ റോബോട്ട് സെന്റർ കോട്ടയിൽ ഇടിക്കുകയും അതിന്റെ ചില ഭാഗങ്ങൾ മറിച്ചിടുകയും ചെയ്യും.

-
കളിസ്ഥലം പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുക്കുക.
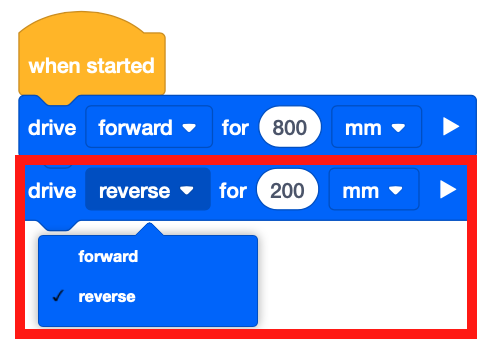
വിആർ റോബോട്ട് ഇപ്പോൾ ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങേണ്ടതുണ്ട്. ഒരു അധിക [Drive for] ബ്ലോക്ക് ഉപയോഗിച്ച്, ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങുന്നതിന് റിവേഴ്സ് ഡ്രൈവ് ആക്കുന്നതിന് പാരാമീറ്ററുകൾ മാറ്റുക.
-
VEXcode VR പ്രോജക്റ്റിലേക്ക് ഒരു രണ്ടാമത്തെ [Drive for] ബ്ലോക്ക് ചേർക്കുക, തുടർന്ന് "മുന്നോട്ട്" എന്നതിൽ നിന്ന് "റിവേഴ്സ്" എന്നതിലേക്ക് ദിശ മാറ്റുക.
-
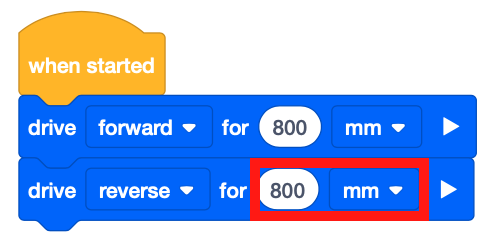
ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങുന്നതിന്, ദൂര മൂല്യം ആദ്യത്തെ [Drive for] ബ്ലോക്കിന് തുല്യമാണെന്ന് ഉറപ്പാക്കുക, 800 മില്ലിമീറ്റർ (mm),
-
"ആരംഭിക്കുക" ബട്ടൺ തിരഞ്ഞെടുത്ത് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.

-
വിആർ റോബോട്ട് 800 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ടും പിന്നോട്ടും നീങ്ങി ആരംഭ സ്ഥാനത്തേക്ക് മടങ്ങും.

കുറിപ്പ്: കാസിൽ ക്രാഷർ ചലഞ്ചിന്റെ ആദ്യ ഭാഗം നിങ്ങൾ വിജയകരമായി പൂർത്തിയാക്കി! മധ്യഭാഗത്തെ കോട്ടയുടെ നാല് ഭാഗങ്ങളും പൂർണ്ണമായും മറിഞ്ഞിട്ടില്ലെങ്കിലും, അവ ചെറുതായി സ്ഥാനഭ്രംശം സംഭവിച്ചിട്ടുണ്ടെങ്കിൽ, അത് സ്വീകാര്യമാണ്.
നിങ്ങളുടെ അറിവിലേക്കായി
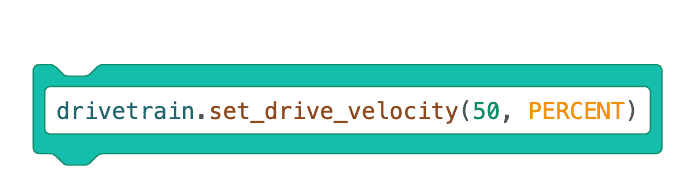
ഒരു VR റോബോട്ട് വ്യത്യസ്ത വേഗതയിൽ മുന്നോട്ടും പിന്നോട്ടും ഡ്രൈവ് ചെയ്യുന്നതിന്, [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക] ബ്ലോക്ക് ഉപയോഗിച്ച് നിങ്ങൾക്ക് ഡ്രൈവ് പ്രവേഗം കൂട്ടുകയോ കുറയ്ക്കുകയോ ചെയ്യാം. [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക] ബ്ലോക്ക് 0% മുതൽ 100% വരെയുള്ള ശ്രേണി സ്വീകരിക്കുന്നു. സ്ഥിരസ്ഥിതി വേഗത 50% ആണ്. വേഗത മാറ്റുന്നത് തുടർന്നുള്ള ഏതൊരു ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾക്കും ബാധകമാകും.
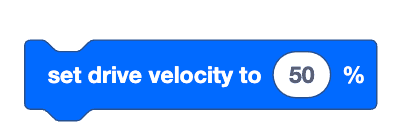
ഇതാണ് സ്വിച്ച് [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക] ബ്ലോക്ക്. പൈത്തൺ കമാൻഡുകൾ ഉപയോഗിക്കുമ്പോൾ, സംഖ്യാ പാരാമീറ്റർ എല്ലായ്പ്പോഴും യൂണിറ്റിന് (PERCENT) മുമ്പായി കോമ ഉപയോഗിച്ച് വേർതിരിച്ച് എഴുതുന്നു എന്നത് ശ്രദ്ധിക്കുക.
നിങ്ങളുടെ പ്രോജക്റ്റ് സംരക്ഷിക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് സംരക്ഷിക്കാൻ, “ഫയൽ” ഡ്രോപ്പ്-ഡൗൺ മെനുവിൽ “നിങ്ങളുടെ ഉപകരണത്തിലേക്ക് സംരക്ഷിക്കുക” തിരഞ്ഞെടുക്കുക.
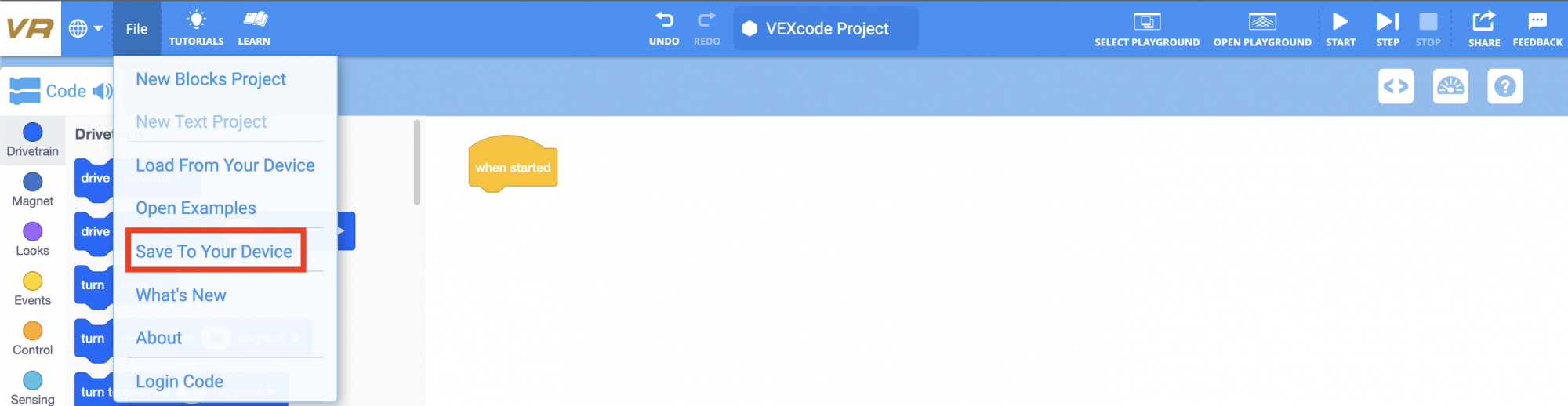
സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് നിങ്ങളുടെ ഉപകരണത്തിലെ ഡൗൺലോഡ് ഫോൾഡറിൽ .vrblocks ഫയലായി ദൃശ്യമാകും.
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
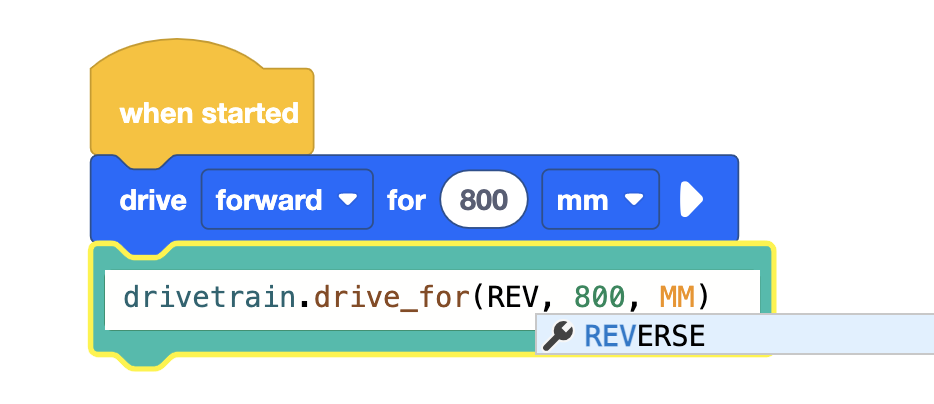
ഒരു സ്വിച്ച് ബ്ലോക്ക് ഉപയോഗിക്കുമ്പോൾ ഡ്രൈവിംഗ് ദിശ മുന്നിലേക്ക് നിന്ന് പിന്നിലേക്ക് മാറ്റാൻ, പരാൻതീസിസിൽ "REVERSE" എന്ന് ടൈപ്പ് ചെയ്യുക.

REVERSE പാരാമീറ്ററിനായി ഒരു നിർദ്ദേശം ദൃശ്യമാകും. നിങ്ങൾക്ക് ഈ നിർദ്ദേശത്തിൽ ക്ലിക്ക് ചെയ്യാം അല്ലെങ്കിൽ പാരാമീറ്റർ പൂരിപ്പിക്കുന്നതിന് എന്റർ അല്ലെങ്കിൽ ടാബ് കീ അമർത്താം. ഈ പാഠത്തിലെ പ്രോജക്റ്റിൽ ഉപയോഗിച്ചിരിക്കുന്ന പാരാമീറ്ററുമായി പൊരുത്തപ്പെടുന്നതിന് ദൂരം പാരാമീറ്റർ 800 MM ആയി സജ്ജമാക്കിയിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.