Lezione 2: Modifica dei parametri nel blocco [Drive for]
Il robot VR non ha toccato il castello centrale nell'ultimo progetto. Deve viaggiare più lontano. Regola il parametro in avanti, testalo e guarda il robot VR rovesciare il castello centrale!
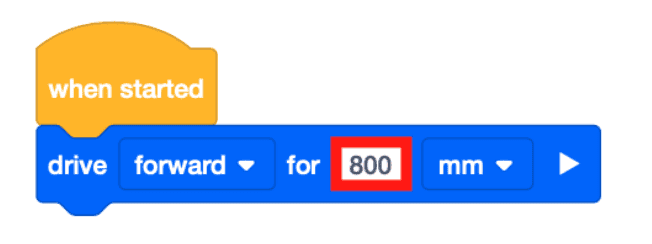
- Impostare la distanza di spostamento del Robot VR inserendo il valore 800 nel blocco [Drive for].
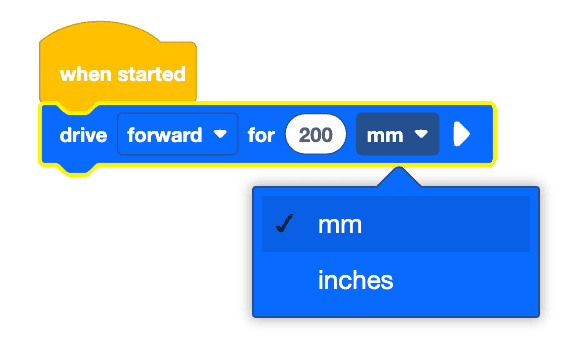
Il blocco [Drive for] può accettare decimali, numeri interi o blocchi numerici. Le unità possono anche essere modificate da millimetri (mm) a pollici.
Utilizzo di blocchi di interruttori
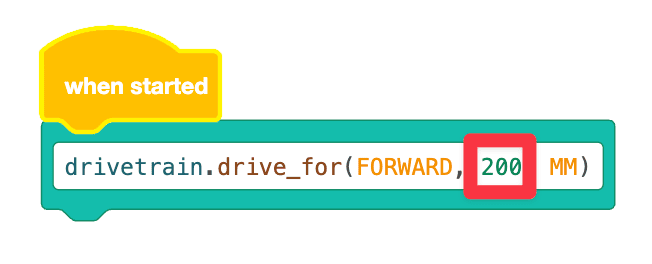
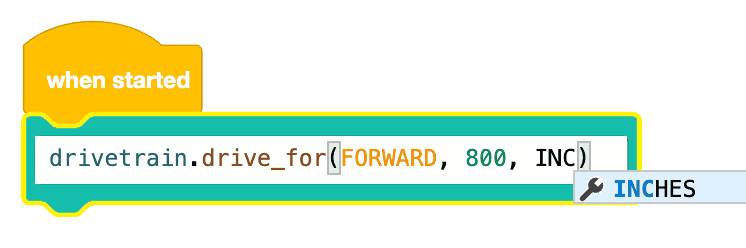
Per modificare le unità di misura del blocco Switch [Drive for] da millimetri a pollici, digitare su "MM" e sostituire questa unità con la parola "POLLICI". Assicurati di digitare le unità di misura in lettere maiuscole. Quando si digita la nuova unità di misura, verrà visualizzato un suggerimento per il parametro. È possibile continuare a digitare per compilare il comando. È inoltre possibile premere il tasto Invio o il tasto TAB, oppure fare clic sul suggerimento per popolare il comando.
-
Avviare il progetto.

-
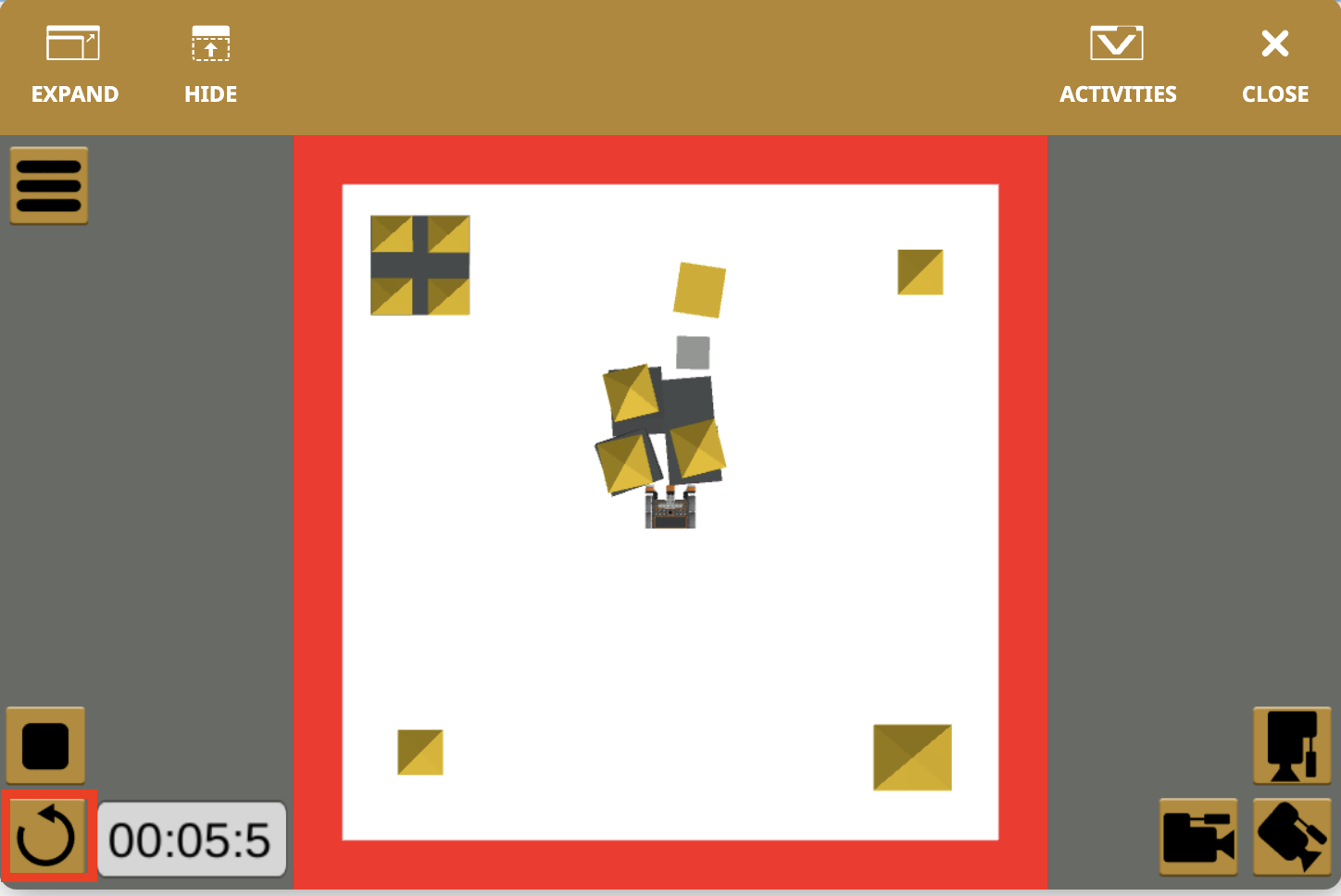
Il robot VR si scontrerà con il castello centrale e ne rovescerà alcune parti.

-
Selezionare il pulsante "Ripristina" per ripristinare il parco giochi.
Il robot VR ora deve tornare alla posizione di partenza. Utilizzare un blocco [Drive for] aggiuntivo e modificare i parametri per farlo guidare in retromarcia per tornare alla posizione di partenza.
-
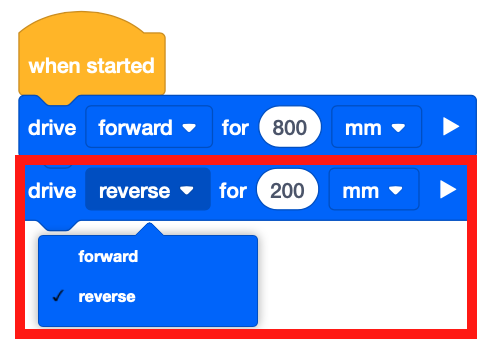
Aggiungere un secondo blocco [Drive for] al progetto VEXcode VR e cambiare la direzione da "avanti" a "indietro".
-
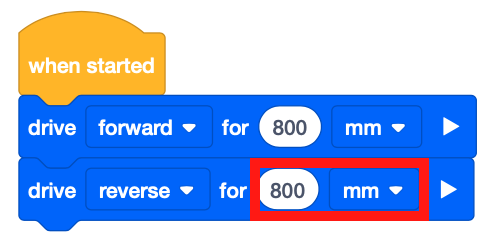
Assicurarsi che il valore della distanza sia lo stesso del primo blocco [Drive for], 800 millimetri (mm), in modo che possa tornare alla posizione di partenza.
-
Selezionare il pulsante "Start" ed eseguire il progetto.

-
Il Robot VR si muoverà avanti e indietro per 800 millimetri (mm), tornando alla posizione di partenza.

Nota: hai completato con successo la prima parte della sfida Castle Crasher! Anche se tutte e quattro le parti del castello centrale non sono completamente rovesciate, se sono leggermente spostate, è accettabile.
Per tua informazione
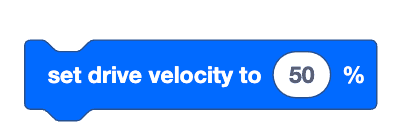
Per far avanzare e invertire un robot VR a velocità diverse, è possibile aumentare o diminuire la velocità di azionamento utilizzando il blocco [Set drive velocity]. Il blocco [Set drive velocity] accetta un intervallo da 0% a 100%. La velocità predefinita è del 50%. La modifica della velocità si applicherà a tutti i successivi comandi Drivetrain.
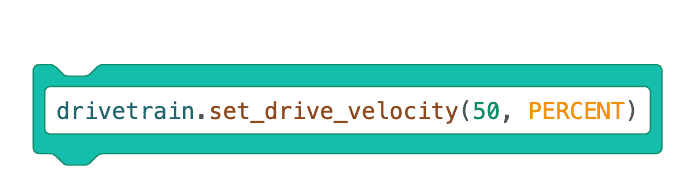
Questo è il blocco Switch [Set drive velocity]. Si noti che quando si utilizzano i comandi Python, il parametro numerico viene sempre scritto prima dell'unità (PERCENTUALE), separato da una virgola.
Salva il tuo progetto
Per salvare il tuo progetto, seleziona "Salva sul tuo dispositivo" nel menu a discesa "File".
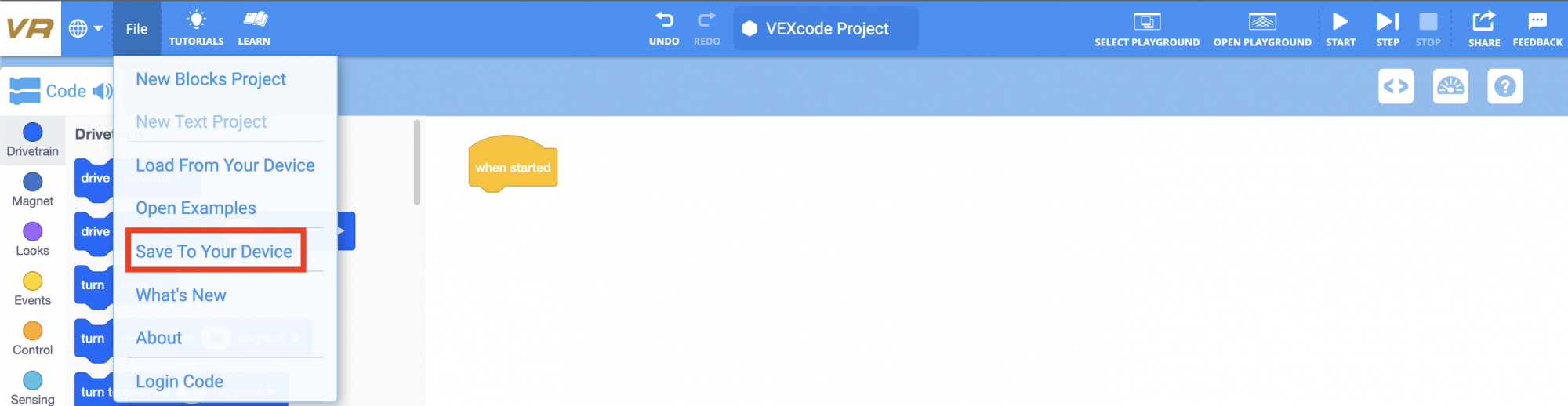
Una volta salvato, il progetto apparirà nella cartella Download del tuo dispositivo come file .vrblocks.
Utilizzo dei blocchi degli interruttori
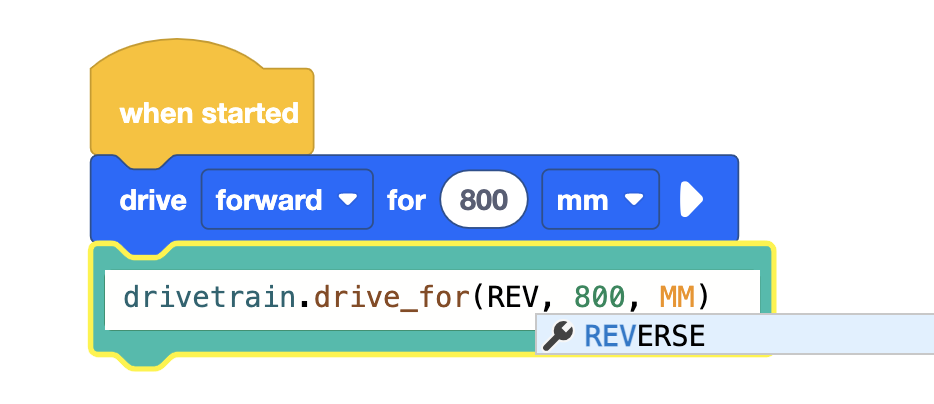
Per cambiare la direzione di marcia da avanti a indietro mentre si utilizza un blocco Switch, digitare la parola "REVERSE" tra parentesi.

Apparirà un suggerimento per il parametro INVERSO. È possibile fare clic su questo suggerimento o premere il tasto Invio o Tab per compilare il parametro. Assicurati di impostare il parametro della distanza a 800 mm in modo che corrisponda al parametro utilizzato nel progetto di questa lezione.