
บทเรียนที่ 2: เปลี่ยนพารามิเตอร์ในบล็อก [Drive for]
หุ่นยนต์ VR ไม่ได้แตะต้องปราสาทตรงกลางในโครงการล่าสุด ต้องเดินทางไกลกว่านี้ ปรับพารามิเตอร์ไปข้างหน้าทดสอบและดูหุ่นยนต์ VR เคาะปราสาทตรงกลาง!
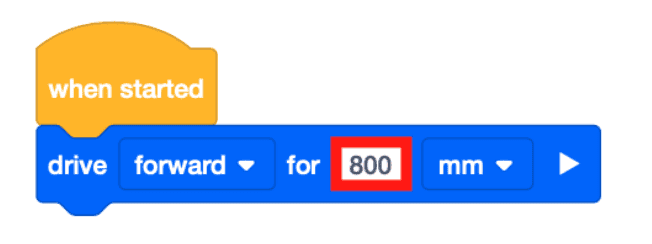
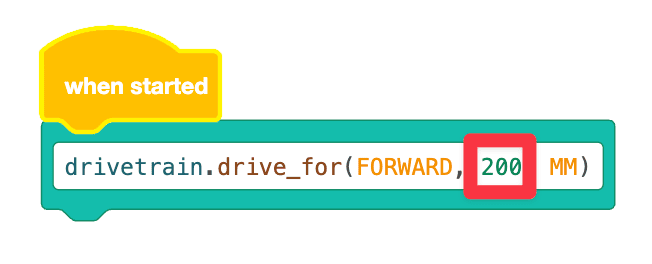
- ตั้งระยะห่างที่หุ่นยนต์ VR จะเคลื่อนที่โดยป้อนค่า 800 ในบล็อก [Drive for]
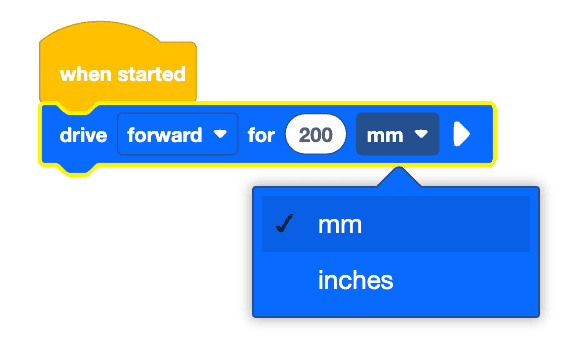
บล็อก [Drive for] สามารถรับทศนิยมจำนวนเต็มหรือบล็อกตัวเลขได้ นอกจากนี้ยังสามารถเปลี่ยนหน่วยจากมิลลิเมตร (มม.) เป็นนิ้วได้
การใช้สวิทช์บล็อก
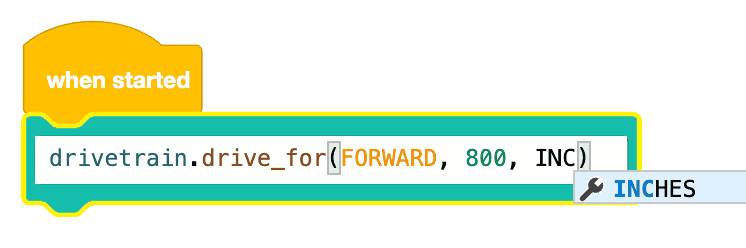
หากต้องการเปลี่ยนหน่วยการวัดของบล็อก Switch [Drive for] จากมิลลิเมตรเป็นนิ้วให้พิมพ์ทับ "MM" และแทนที่หน่วยนี้ด้วยคำว่า "นิ้ว" ตรวจสอบให้แน่ใจว่าคุณพิมพ์หน่วยการวัดเป็นตัวพิมพ์ใหญ่ทั้งหมด ในขณะที่คุณพิมพ์หน่วยการวัดใหม่คำแนะนำสำหรับพารามิเตอร์จะปรากฏขึ้น คุณสามารถพิมพ์เพื่อเติมคำสั่งต่อไปได้ นอกจากนี้คุณยังสามารถกดปุ่ม ENTER หรือปุ่ม TAB หรือคลิกที่คำแนะนำเพื่อเติมคำสั่ง
-
เริ่มโปรเจกต์

-
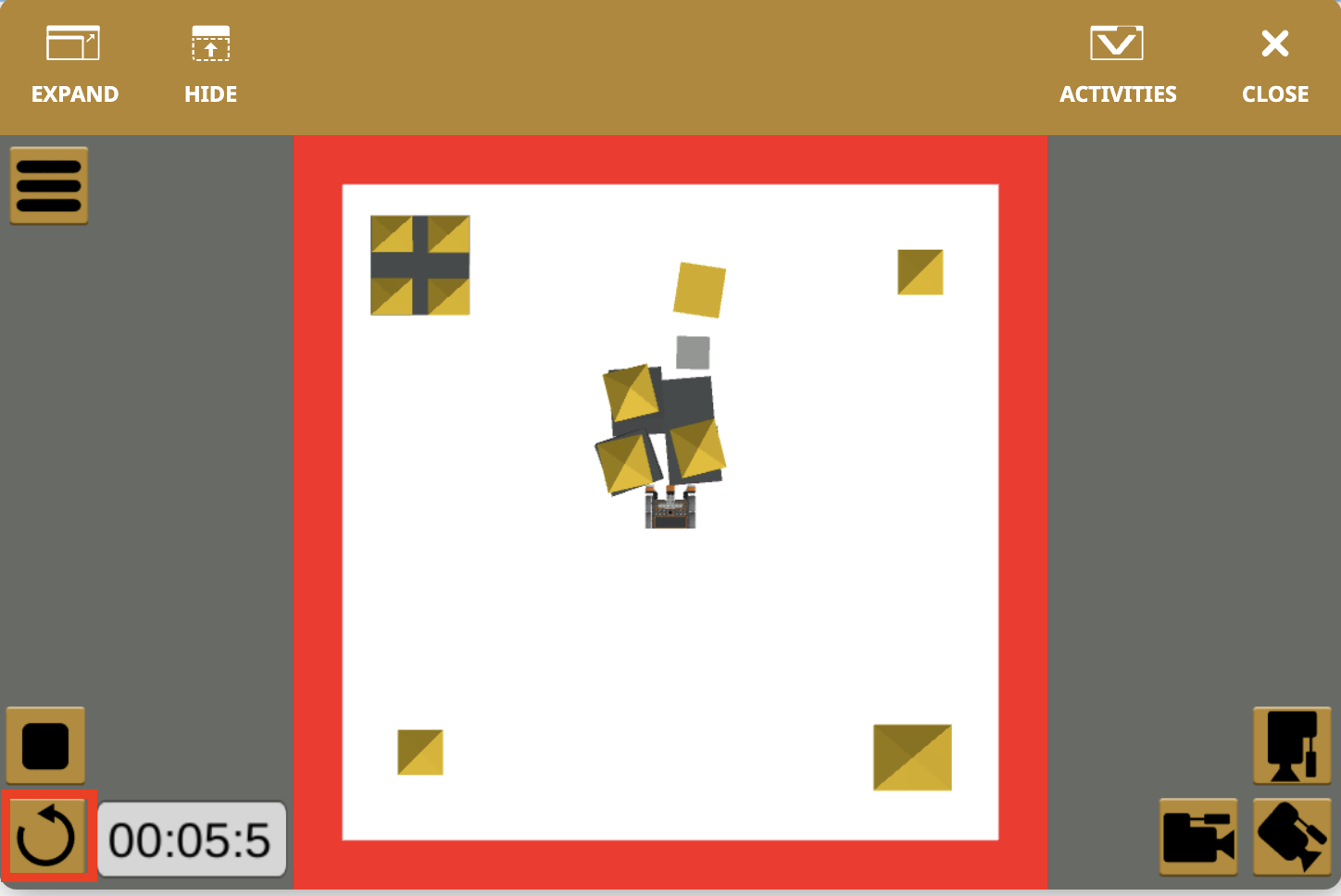
หุ่นยนต์ VR จะชนกับปราสาทตรงกลางและทุบชิ้นส่วนของมัน

-
เลือกปุ่ม "รีเซ็ต" เพื่อรีเซ็ตสนามเด็กเล่น
ตอนนี้หุ่นยนต์ VR ต้องกลับไปที่ตำแหน่งเริ่มต้น ใช้บล็อก [Drive for] เพิ่มเติมและเปลี่ยนพารามิเตอร์เพื่อให้ไดรฟ์ย้อนกลับเพื่อกลับไปยังตำแหน่งเริ่มต้น
-
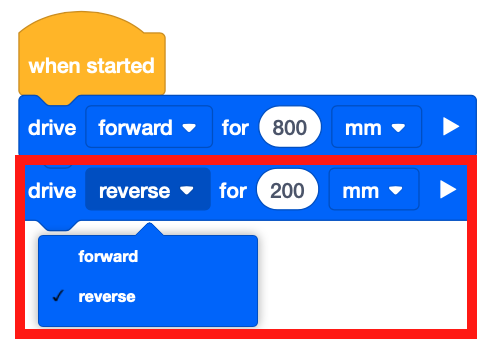
เพิ่มบล็อก [Drive for] หนึ่งวินาทีในโครงการ VEXcode VR และเปลี่ยนทิศทางจาก "ไปข้างหน้า" เป็น "ย้อนกลับ"
-
ตรวจสอบให้แน่ใจว่าค่าระยะทางเท่ากับบล็อก [Drive for] แรก 800 มิลลิเมตร (มม.) เพื่อให้กลับไปที่ตำแหน่งเริ่มต้น

-
เลือกปุ่ม "เริ่ม" และเรียกใช้โปรเจกต์

-
หุ่นยนต์ VR จะเคลื่อนที่ไปข้างหน้าและข้างหลังเป็นระยะ 800 มิลลิเมตร (มม.) กลับสู่ตำแหน่งเริ่มต้น

หมายเหตุ: คุณทำส่วนแรกของการท้าทาย Castle Crasher สำเร็จแล้ว! แม้ว่าทั้งสี่ส่วนของปราสาทตรงกลางจะไม่ได้รับการกระแทกอย่างสมบูรณ์หากพวกเขาพลัดถิ่นเล็กน้อยนั่นก็เป็นที่ยอมรับได้
สำหรับข้อมูลของคุณ
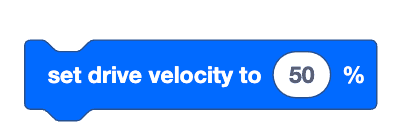
ในการทำให้ VR Robot ขับเคลื่อนไปข้างหน้าและย้อนกลับด้วยความเร็วที่แตกต่างกันคุณสามารถเพิ่มหรือลดความเร็วของไดรฟ์โดยใช้บล็อก [ตั้งค่าความเร็วของไดรฟ์] บล็อก [ตั้งค่าความเร็วไดรฟ์] ยอมรับช่วงตั้งแต่ 0% - 100% ความเร็วเริ่มต้นคือ 50% การเปลี่ยนความเร็วจะนำไปใช้กับคำสั่ง Drivetrain ที่ตามมา
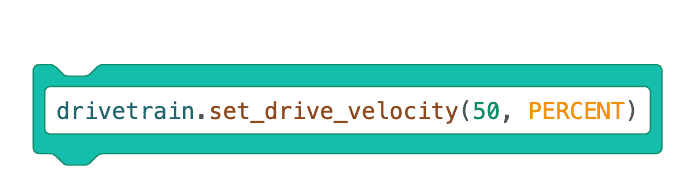
นี่คือบล็อกสวิตช์ [ตั้งค่าความเร็วไดรฟ์] โปรดสังเกตว่าเมื่อใช้คำสั่ง Python พารามิเตอร์ตัวเลขจะถูกเขียนก่อนหน่วย (เปอร์เซ็นต์) เสมอคั่นด้วยเครื่องหมายจุลภาค
บันทึกโปรเจกต์ของคุณ
หากต้องการบันทึกโปรเจกต์ให้เลือก “บันทึกลงในอุปกรณ์ของคุณในเมนูแบบเลื่อนลง“ ไฟล์ ”
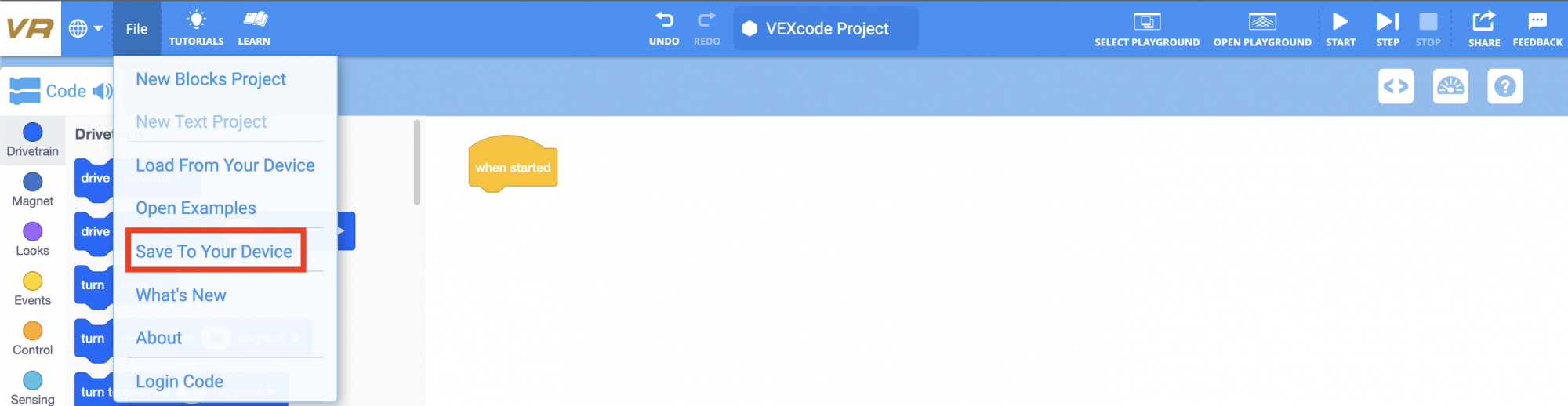
เมื่อบันทึกแล้วโปรเจกต์จะปรากฏในโฟลเดอร์ดาวน์โหลดของอุปกรณ์ของ คุณ เป็นไฟล์ .vrblocks
การใช้สวิทช์บล็อก
หากต้องการเปลี่ยนทิศทางการขับขี่จากไปข้างหน้าเป็นย้อนกลับในขณะที่ใช้บล็อกสวิตช์ให้พิมพ์คำว่า "ย้อนกลับ" ในวงเล็บ

คำแนะนำจะปรากฏขึ้นสำหรับพารามิเตอร์ย้อนกลับ คุณสามารถคลิกที่คำแนะนำนี้ หรือกดปุ่ม ENTER หรือ TAB เพื่อกรอกพารามิเตอร์ ตรวจสอบให้แน่ใจว่าคุณตั้งค่าพารามิเตอร์ระยะทางเป็น 800 MM เพื่อให้ตรงกับพารามิเตอร์ที่ใช้ในโครงการของบทเรียนนี้
