পাঠ ২: [ড্রাইভ ফর] ব্লকে প্যারামিটার পরিবর্তন করুন
ভিআর রোবটটি শেষ প্রকল্পে কেন্দ্রের দুর্গ স্পর্শ করেনি। এটাকে আরও দূরে ভ্রমণ করতে হবে। ফরোয়ার্ড প্যারামিটারটি সামঞ্জস্য করুন, এটি পরীক্ষা করুন এবং ভিআর রোবটকে কেন্দ্রের দুর্গের উপর দিয়ে আঘাত করতে দেখুন!
- [ড্রাইভের জন্য] ব্লকে 800 মান প্রবেশ করে VR রোবটটি যে দূরত্বটি সরবে তা সেট করুন।
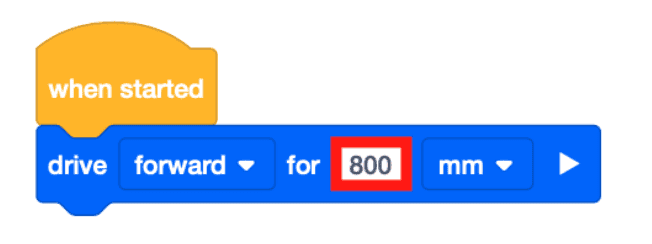
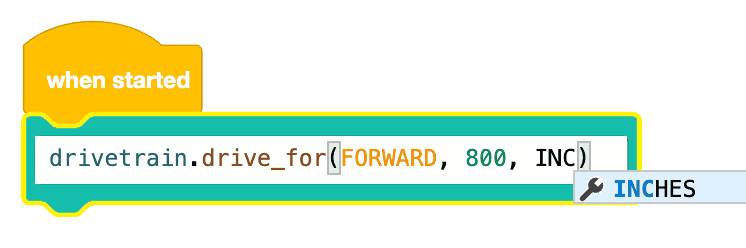
[ড্রাইভ ফর] ব্লক দশমিক, পূর্ণসংখ্যা, অথবা সংখ্যাসূচক ব্লক গ্রহণ করতে পারে। ইউনিটগুলি মিলিমিটার (মিমি) থেকে ইঞ্চিতেও পরিবর্তন করা যেতে পারে।
সুইচ ব্লক ব্যবহার করা
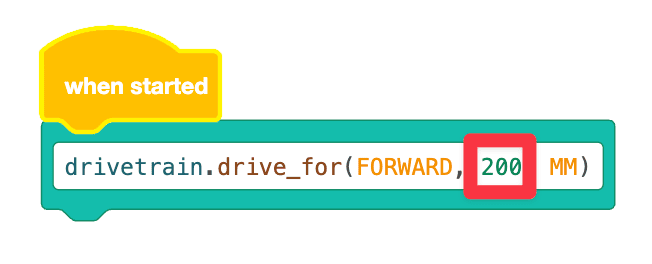
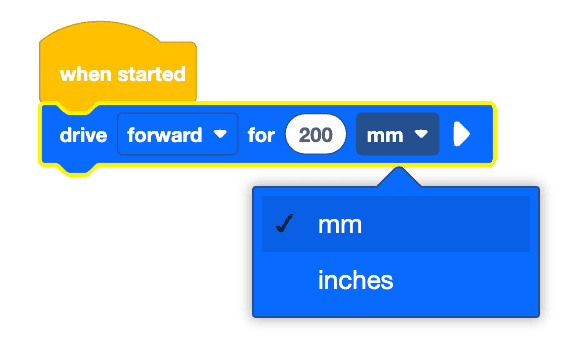
সুইচ [ড্রাইভ ফর] ব্লকের পরিমাপের একক মিলিমিটার থেকে ইঞ্চিতে পরিবর্তন করতে, "MM" টাইপ করুন এবং এই এককের পরিবর্তে "INCHES" শব্দটি লিখুন। পরিমাপের এককগুলো সব বড় হাতের অক্ষরে টাইপ করুন। আপনি যখন পরিমাপের নতুন একক টাইপ করবেন, তখন প্যারামিটারের জন্য একটি পরামর্শ প্রদর্শিত হবে। কমান্ডটি পূরণ করার জন্য আপনি টাইপ করা চালিয়ে যেতে পারেন। আপনি এন্টার কী বা ট্যাব কী টিপতে পারেন, অথবা কমান্ডটি পূরণ করতে পরামর্শে ক্লিক করতে পারেন।
-
প্রকল্প শুরু করুন।

-
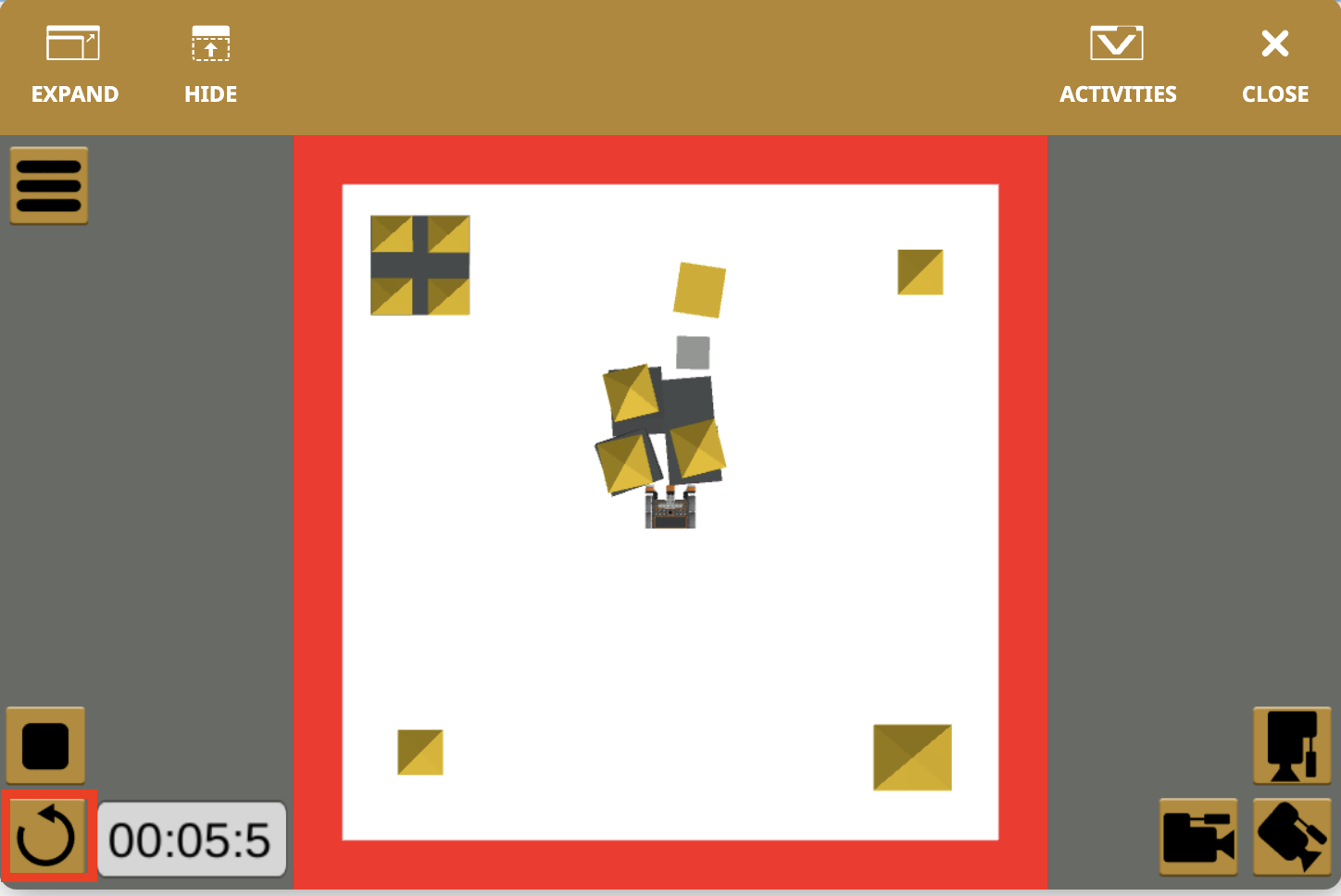
ভিআর রোবট কেন্দ্রের দুর্গের সাথে সংঘর্ষ করবে এবং এর কিছু অংশ ছিটকে যাবে।

-
খেলার মাঠ রিসেট করতে "রিসেট" বোতামটি নির্বাচন করুন।
VR রোবটকে এখন প্রারম্ভিক অবস্থানে ফিরে আসতে হবে। একটি অতিরিক্ত [এর জন্য ড্রাইভ] ব্লক ব্যবহার করুন এবং প্রারম্ভিক অবস্থানে ফিরে যাওয়ার জন্য এটিকে বিপরীত দিকে ড্রাইভ করতে পরামিতিগুলি পরিবর্তন করুন।
-
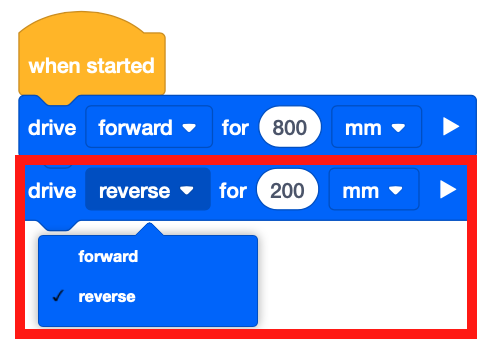
VEXcode VR প্রকল্পে একটি দ্বিতীয় [এর জন্য ড্রাইভ] ব্লক যোগ করুন এবং "ফরোয়ার্ড" থেকে "বিপরীত" দিক পরিবর্তন করুন।
-
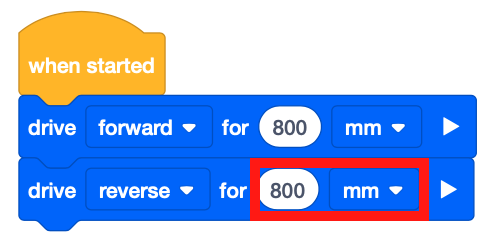
নিশ্চিত করুন যে দূরত্বের মানটি প্রথম [ড্রাইভের জন্য] ব্লকের সমান, 800 মিলিমিটার (মিমি), যাতে এটি প্রারম্ভিক অবস্থানে ফিরে আসে।
-
"স্টার্ট" বোতামটি নির্বাচন করুন এবং প্রকল্পটি চালান।

-
VR রোবটটি 800 মিলিমিটার (মিমি) জন্য এগিয়ে এবং পিছনে সরে যাবে, শুরুর অবস্থানে ফিরে আসবে।

দ্রষ্টব্য: আপনি সফলভাবে ক্যাসেল ক্র্যাশার চ্যালেঞ্জের প্রথম অংশটি সম্পন্ন করেছেন! এমনকি যদি কেন্দ্র দুর্গের চারটি অংশ সম্পূর্ণভাবে ছিটকে না যায়, যদি সেগুলি সামান্য স্থানচ্যুত হয় তবে এটি গ্রহণযোগ্য।
আপনার তথ্যের জন্য
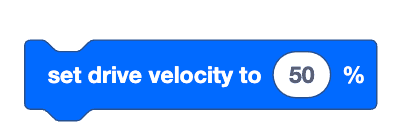
একটি VR রোবটকে বিভিন্ন গতিতে সামনের দিকে এবং বিপরীত দিকে ড্রাইভ করতে, আপনি [Set drive velocity] ব্লক ব্যবহার করে ড্রাইভের বেগ বাড়াতে বা কমাতে পারেন। [সেট ড্রাইভ বেগ] ব্লক 0% - 100% পর্যন্ত একটি পরিসর গ্রহণ করে। ডিফল্ট বেগ 50%। বেগ পরিবর্তন পরবর্তী যেকোনো ড্রাইভট্রেন কমান্ডের ক্ষেত্রে প্রযোজ্য হবে।
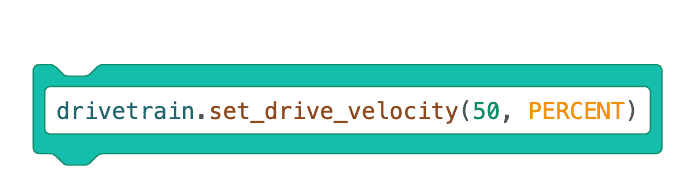
এটি হল সুইচ [ড্রাইভ বেগ সেট করুন] ব্লক। লক্ষ্য করুন যে পাইথন কমান্ড ব্যবহার করার সময়, সংখ্যাসূচক প্যারামিটারটি সর্বদা ইউনিট (PERCENT) এর আগে লেখা হয়, একটি কমা দ্বারা পৃথক করা হয়।
আপনার প্রকল্প সংরক্ষণ করুন
আপনার প্রকল্প সংরক্ষণ করতে, "ফাইল" ড্রপ-ডাউন মেনুতে "আপনার ডিভাইসে সংরক্ষণ করুন" নির্বাচন করুন।
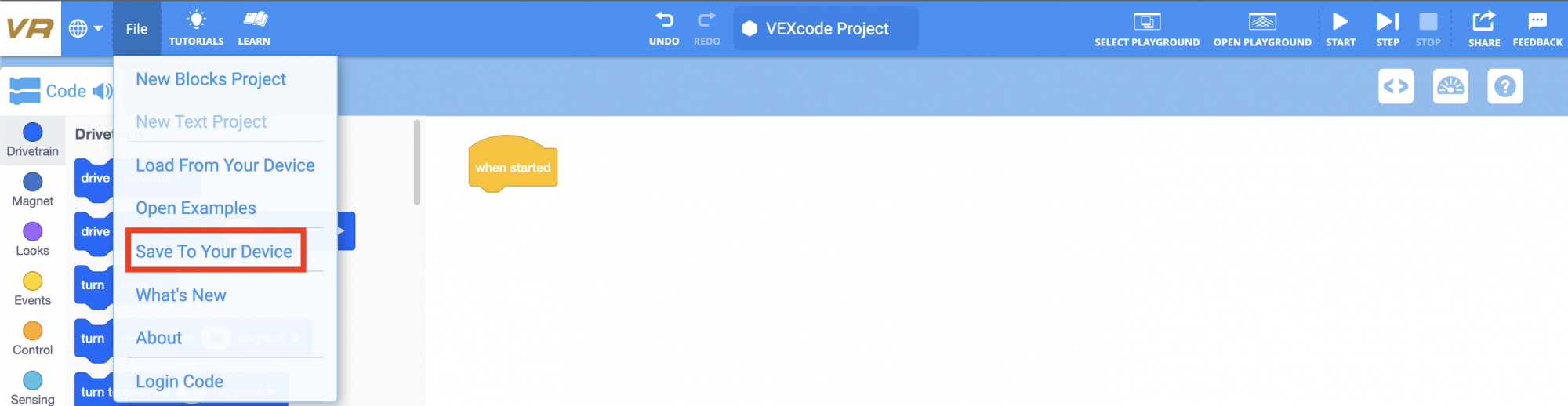
একবার সংরক্ষিত হলে, প্রকল্পটি আপনার ডিভাইসের ডাউনলোড ফোল্ডারে ফাইল হিসাবে উপস্থিত হবে।
সুইচ ব্লক ব্যবহার করা
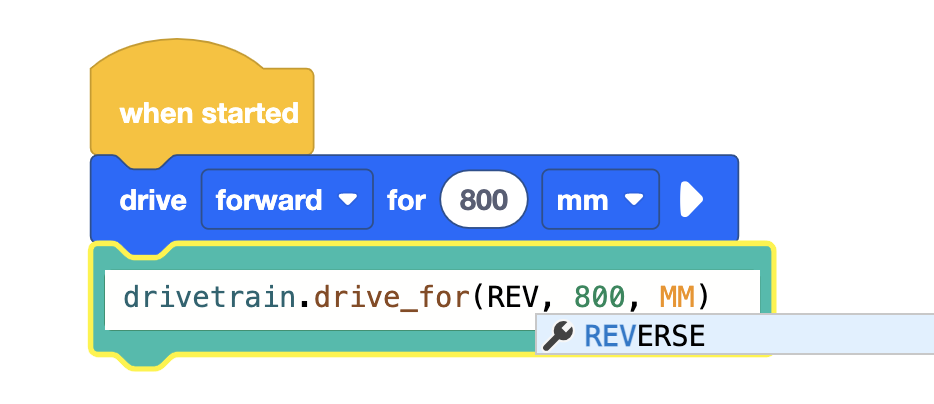
সুইচ ব্লক ব্যবহার করার সময় ড্রাইভিং দিকটি সামনের দিক থেকে বিপরীত দিকে পরিবর্তন করতে, বন্ধনীতে "REVERSE" শব্দটি টাইপ করুন।

REVERSE প্যারামিটারের জন্য একটি পরামর্শ প্রদর্শিত হবে। আপনি এই পরামর্শে ক্লিক করতে পারেন অথবা প্যারামিটারটি পূরণ করতে এন্টার বা ট্যাব কী টিপতে পারেন। এই পাঠের প্রকল্পে ব্যবহৃত প্যারামিটারের সাথে মিল রাখার জন্য দূরত্বের প্যারামিটারটি 800 MM এ সেট করুন।