
الدرس 2: القيادة إلى الرقم "1"
-
الآن سيعود روبوت الواقع الافتراضي إلى الرقم "1".

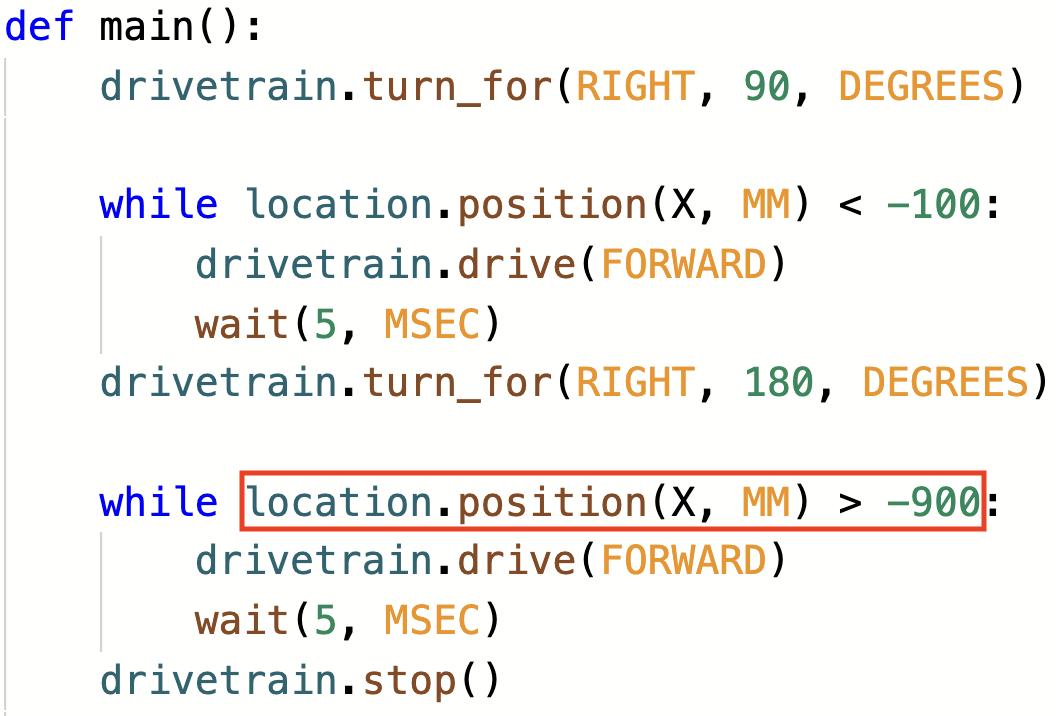
- لتوجيه روبوت الواقع الافتراضي مرة أخرى إلى الرقم "1"، قم بإزالة الأمر stop واستبدله بالأوامر التالية. يجب أن يبدو مشروعك كما يلي:
# Add project code in "main"
def main (): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position (X, MM) < -100: drivetrain.drive
(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
while location.position(X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.stop ()- لاحظ أن الحلقة الثانية بينما تحتوي على عامل أكبر من بدلاً من عامل أقل
من. وذلك لأن روبوت الواقع الافتراضي يقود الآن إلى أسفل المحور X والأرقام أصبحت أصغر. سيتوقف روبوت الواقع
الافتراضي بمجرد أن تكون قيم X أقل من -900.
- قم بتشغيل ملعب خريطة شبكة الأرقام إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
- شاهد روبوت الواقع الافتراضي يقود إلى الرقم "1" في ملعب خريطة شبكة الأرقام.
- في هذا المشروع، ينتقل روبوت الواقع الافتراضي إلى الرقم "1" في ملعب خريطة شبكة الأرقام. نظرًا لأن قيم X تتناقص مع انتقال روبوت الواقع الافتراضي إلى الرقم "1"، يستخدم المشروع مشغلًا أكبر من.
- سوف يتحرك روبوت الواقع الافتراضي للأمام بينما تكون قيمة X أكبر من الإحداثي الذي يكون عليه الرقم المشار إليه ويتوقف بمجرد أن تكون قيمة X أقل من قيمة X للإحداثي. نظرًا لأن قيمة X للرقم "1" هي -900، سيتوقف روبوت الواقع الافتراضي عن القيادة بمجرد أن تكون قيمة X أقل من -900.
لمعلوماتك
سيؤدي الأمر wait إلى إيقاف تدفق المشروع مؤقتًا لفترة زمنية محددة بالثواني قبل الانتقال إلى الأمر التالي. يمكن استخدام الأمر wait للمساعدة في ملاحظة السلوكيات الفردية في مشروعك والتي قد تعمل معًا بسرعة، مثل التنقل بين موقعين مختلفين في Playground. يمكن أن ينتظر أمر الانتظار في ثوانٍ أو أجزاء من الثانية. سيؤدي كلا الأمرين إلى إيقاف حركة روبوت الواقع الافتراضي مؤقتًا لمدة ثانية واحدة.
انتظر(1، ثانية)
انتظر(1000، مللي ثانية)في ساحة اللعب الخاصة بخريطة شبكة الأرقام ، يمكن استخدام الأمر wait لإيقاف روبوت الواقع الافتراضي مؤقتًا عند رقم معين قبل الانتقال إلى الموقع التالي في المشروع. في هذا المثال، سيؤدي الأمر wait إلى توقف روبوت الواقع الافتراضي لمدة ثانيتين على الرقم "5"، قبل العودة إلى الرقم "1".
# Add project code in "main"
def main (): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position (X, MM) < -100: drivetrain.drive
(FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position(X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.stop ()قم باختيار الزر التالي لمواصلة بقية هذا الدرس.