
Leçon 2 : Atteindre le numéro « 1 »
-
Maintenant, le robot VR va revenir au nombre « 1 ».

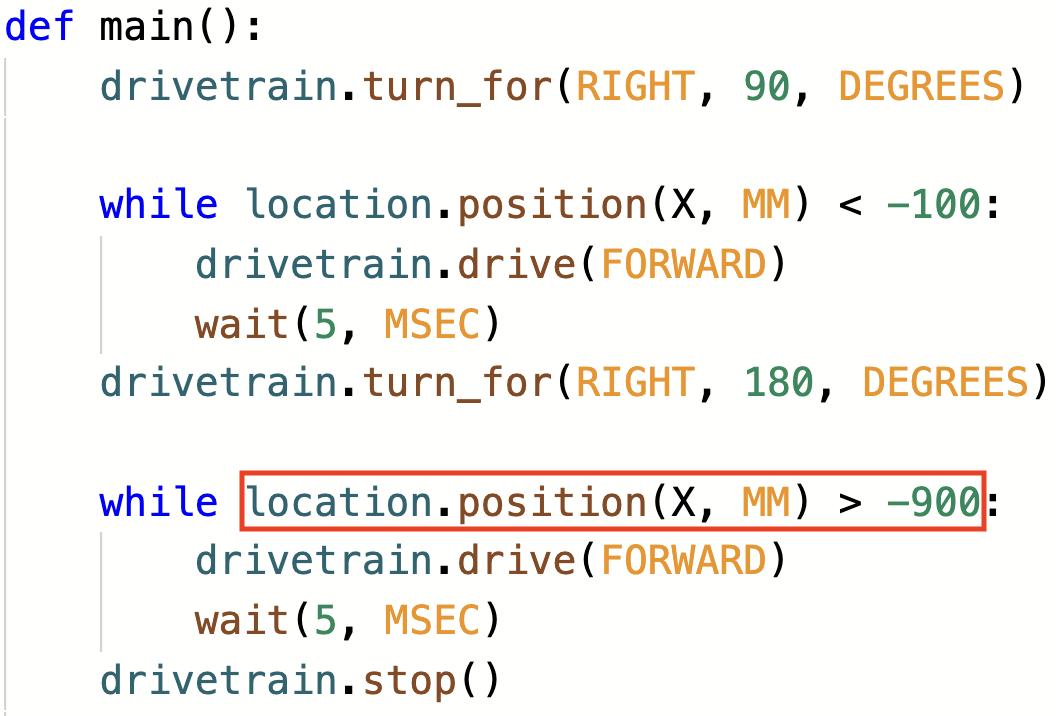
- Pour ramener le robot VR au numéro « 1 », supprimez la commande stop et remplacez-la par les commandes suivantes. Votre projet doit ressembler à ceci :
# Add project code in "main"
def main() :
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position (X, MM) < -100 :
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
while location.position (X, MM) > -900 :
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- Notez que la deuxième boucle while contient un opérateur supérieur à au lieu d'un opérateur inférieur à. En effet, le robot de réalité virtuelle descend maintenant l'axe X et les chiffres deviennent de plus en plus petits. Le robot VR s'arrêtera une fois que les valeurs X seront INFÉRIEURES à -900.
- Lancez le terrain de jeu Number Grid Map s'il n'est pas déjà ouvert et exécutez le projet.
- Regardez le lecteur VR Robot jusqu'au numéro « 1 » sur le terrain de jeu Number Grid Map.
- Dans ce projet, le robot VR se dirige vers le numéro « 1 » sur le terrain de jeu de la carte de la grille numérique. Étant donné que les valeurs X diminuent à mesure que le robot VR atteint le nombre « 1 », le projet utilise un opérateur supérieur à.
- Le robot VR avancera lorsque la valeur X est supérieure à la coordonnée sur laquelle le nombre indiqué est activé et s'arrêtera une fois que sa valeur X sera inférieure à la valeur X de la coordonnée. Étant donné que la valeur X du nombre « 1 » est de -900, le robot VR cessera de conduire une fois que la valeur X sera inférieure à -900.
Pour votre information
Une commande wait mettra en pause le flux du projet pendant une période de temps spécifique en secondes avant de passer à la commande suivante. Une commande wait peut être utilisée pour aider à observer les comportements individuels de votre projet qui peuvent s'exécuter rapidement ensemble, comme le déplacement entre deux emplacements différents sur un terrain de jeu. Une commande wait peut attendre en secondes ou en millisecondes. Ces deux commandes mettront en pause le mouvement du robot VR pendant 1 seconde.
attendre(1, SECONDES)
attendre(1000, MSEC)Dans le jeu de cartes de grille numérique , la commande wait pourrait être utilisée pour faire en sorte que le robot VR s'arrête sur un nombre spécifique avant de passer à l'emplacement suivant du projet. Dans cet exemple, la commande wait fera s'arrêter le robot VR pendant 2 secondes sur le numéro « 5 », avant de revenir au numéro « 1 ».
# Add project code in "main"
def main() :
drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100 :
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position (X, MM) > -900 :
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop()Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.