
2과: '1'번으로 운전하세요
-
이제 VR 로봇은 숫자 '1'로 돌아갈 것입니다.

- VR 로봇을 숫자 '1'로 되돌리려면 정지명령을 제거하고 다음 명령으로 바꾸세요. 프로젝트는 다음과 같아야 합니다.
# "main"에 프로젝트 코드 추가
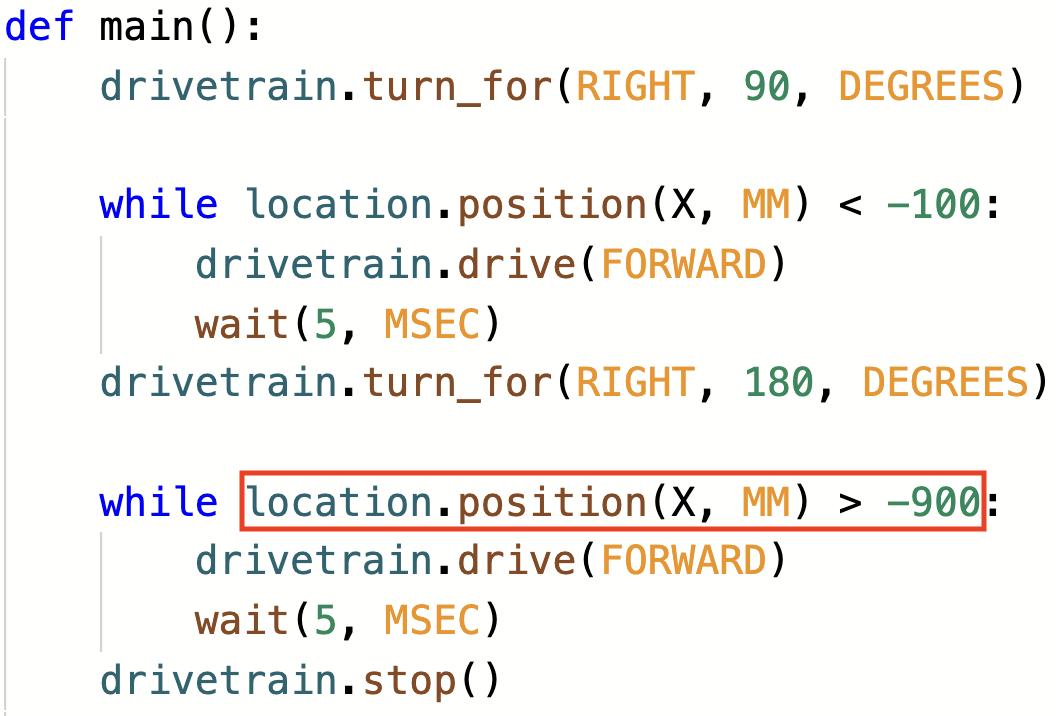
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- 두 번째 while 루프에는 '작음' 연산자 대신 '크게' 연산자가 포함되어 있다는 점에 유의하세요. 이는 VR 로봇이 이제 X축을 따라 주행하고 있으며 숫자가 점점 작아지고 있기 때문입니다. VR 로봇은 X 값이 -900보다 작아지면 멈춥니다.
- 아직 열려 있지 않으면 Number Grid Map Playground 을 실행하고 프로젝트를 실행합니다.
- 번호 그리드 맵 놀이터에서 VR 로봇이 숫자 '1'을 향해 달리는 모습을 지켜보세요.
- 이 프로젝트에서 VR 로봇은 번호 그리드 맵 놀이터의 숫자 '1'을 향해 주행합니다. VR 로봇이 숫자 '1'에 도달할 때 X 값은 에서 감소하므로, 이 프로젝트에서는 보다 큰 연산자를 사용합니다.
- VR 로봇은 해당 숫자가 있는 좌표의 X값보다 에서 만큼 큰 동안 앞으로 주행하고, X값이 해당 좌표의 X값보다 에서 만큼 작은 경우 멈춥니다. 숫자 '1'의 X 값은 -900이므로, X 값이 -900보다 작아지면 VR 로봇은 운전을 멈춥니다.
귀하의 정보를 위해
wait명령은 다음 명령으로 넘어가기 전에 특정 시간(초) 동안 프로젝트 흐름을 일시 중지합니다. wait명령은 놀이터에서 두 개의 다른 위치 사이를 이동하는 것처럼 빠르게 함께 실행될 수 있는 프로젝트 내의 개별 동작을 관찰하는 데 도움이 될 수 있습니다. Await명령은 초 또는 밀리초 단위로 기다릴 수 있습니다. 두 명령 모두 VR 로봇의 움직임을 1초 동안 멈춥니다.
wait(1, 초)
wait(1000, MSEC)숫자 그리드 맵 놀이터에서대기명령을 사용하면 VR 로봇이 프로젝트의 다음 위치로 이동하기 전에 특정 숫자에서 일시 정지하도록 할 수 있습니다. 이 예에서wait명령은 VR 로봇이 숫자 '5'에서 2초간 멈춘 후 숫자 '1'로 돌아가도록 합니다.
# "main"에 프로젝트 코드 추가
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()이 수업의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.