
पाठ 2: नंबर '1' तक ड्राइव करें
-
अब वीआर रोबोट वापस नंबर '1' पर पहुंच जाएगा।

- वीआर रोबोट को वापस संख्या '1' पर ले जाने के लिए, स्टॉपकमांड को हटा दें और इसे निम्नलिखित कमांड से बदलें। आपका प्रोजेक्ट इस तरह दिखना चाहिए:
# "main" में प्रोजेक्ट कोड जोड़ें
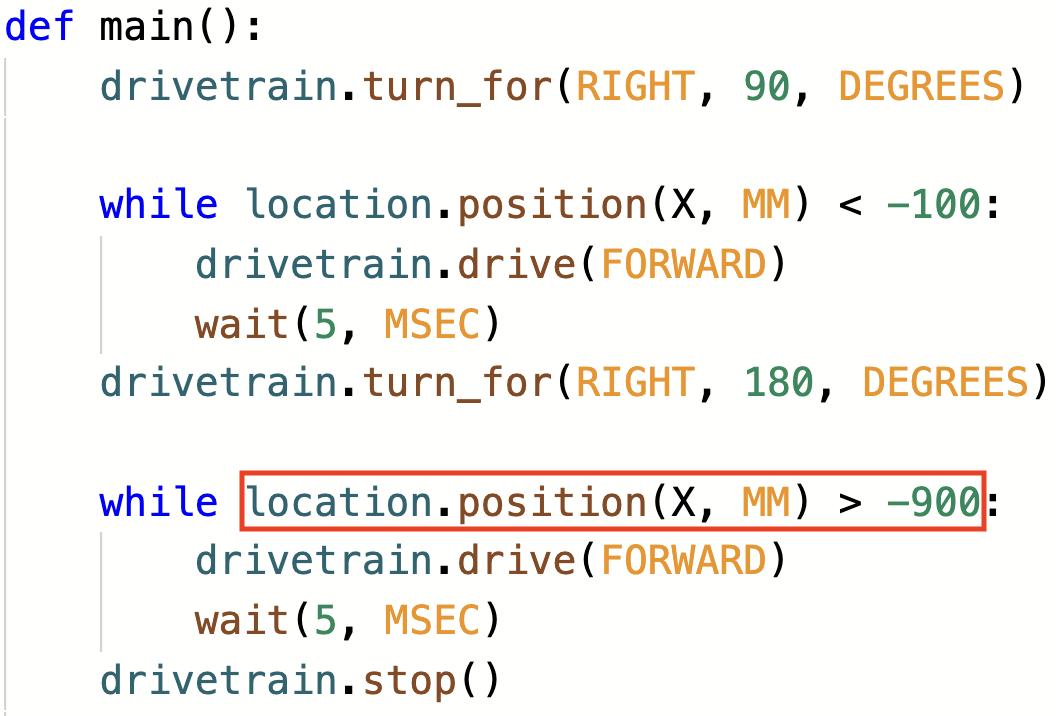
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- ध्यान दें कि दूसरे while लूप में कम से कम ऑपरेटर के बजाय अधिक से अधिक ऑपरेटर शामिल है। ऐसा इसलिए है क्योंकि वीआर रोबोट अब एक्स अक्ष पर नीचे की ओर जा रहा है और संख्याएं छोटी होती जा रही हैं। जब X-मान -900 से कम हो जाएगा तो VR रोबोट रुक जाएगा।
- यदि नंबर ग्रिड मैप प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं।
- नंबर ग्रिड मानचित्र खेल के मैदानपर नंबर '1' के लिए वी.आर. रोबोट ड्राइव देखें।
- इस परियोजना में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '1' तक ड्राइव करता है। चूंकि वीआर रोबोट के संख्या '1' तक पहुंचने पर X-मान घटता है, इसलिए परियोजना में ग्रेटर दैन ऑपरेटर का उपयोग किया जाता है।
- जब तक X-मान उस निर्देशांक से या अधिक होगा जिस पर संकेतित संख्या स्थित है, VR रोबोट आगे बढ़ेगा और जब इसका X-मान निर्देशांक के X-मान से कम होगा, तब तक यह रुक जाएगा। चूंकि संख्या '1' का X-मान -900 है, इसलिए X-मान -900 से कम होने पर VR रोबोट गाड़ी चलाना बंद कर देगा।
आपकी जानकारी के लिए
waitकमांड अगले कमांड पर जाने से पहले सेकंड में एक विशिष्ट समय अवधि के लिए परियोजना के प्रवाह को रोक देगा। waitकमांड का उपयोग आपके प्रोजेक्ट में अलग-अलग व्यवहारों को देखने में मदद के लिए किया जा सकता है, जो एक साथ तेजी से चल सकते हैं, जैसे कि प्लेग्राउंड पर दो अलग-अलग स्थानों के बीच घूमना। waitकमांड सेकंड या मिलीसेकंड में प्रतीक्षा कर सकता है। ये दोनों आदेश वीआर रोबोट की गति को 1 सेकंड के लिए रोक देंगे।
प्रतीक्षा(1, सेकंड)
प्रतीक्षा(1000, MSEC)नंबर ग्रिड मैप प्लेग्राउंड में,प्रतीक्षाकमांड का उपयोग परियोजना में अगले स्थान पर जाने से पहले वीआर रोबोट को एक विशिष्ट संख्या पर रोकने के लिए किया जा सकता है। इस उदाहरण में,waitकमांड VR रोबोट को संख्या '5' पर 2 सेकंड के लिए रोक देगा, उसके बाद वह संख्या '1' पर वापस चला जाएगा।
# "main" में प्रोजेक्ट कोड जोड़ें
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।