
บทเรียนที่ 2: ขับรถไปยังหมายเลข '1'
-
ตอนนี้หุ่นยนต์ VR จะขับกลับไปที่หมายเลข ‘1’

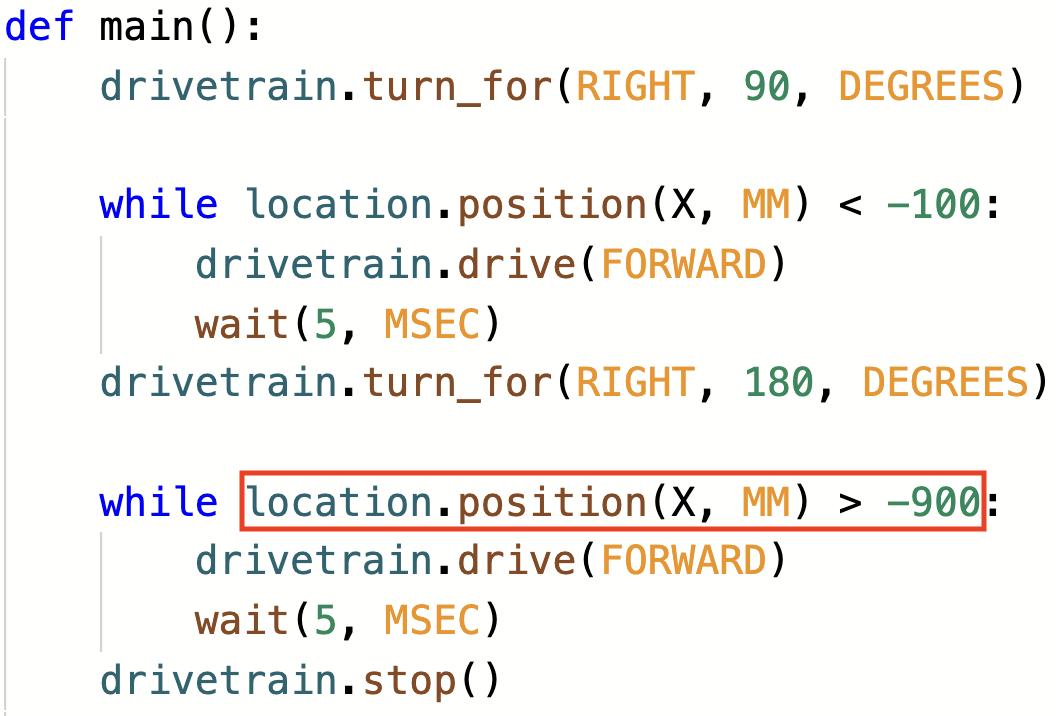
- หากต้องการนำทางหุ่นยนต์ VR กลับไปที่หมายเลข '1' ให้ลบคำสั่ง หยุด ออก และแทนที่ด้วยคำสั่งต่อไปนี้ โปรเจกต์ของคุณควรมีลักษณะดังนี้:
# เพิ่มรหัสโครงการใน "main"
def main (): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position (X, MM )-100 < : drivetrain.drive
(FORWARD)
wait (5, msec) drivetrain.turn_for
(RIGHT, 180, DEGREES)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait (5, msec
) drivetrain.stop ()- โปรดทราบว่าลู while ที่สอง มีตัวดำเนินการที่มากกว่าแทนที่จะเป็นตัวดำเนินการที่น้อยกว่า นี่เป็นเพราะตอนนี้หุ่นยนต์ VR กำลังขับเคลื่อนแกน X ลงมาและตัวเลขก็น้อยลง หุ่นยนต์ VR จะหยุดทำงานเมื่อค่า X น้อยกว่า -900
- เปิด Number Grid Map Playground หากยังไม่ได้เปิดและเรียกใช้โครงการ
- ดู VR Robot ขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground
- ในโครงการนี้หุ่นยนต์ VR จะขับไปที่หมายเลข ‘1’ บน Number Grid MapPlayground เนื่องจากค่า X ลดลง เมื่อ VR Robot ขับเคลื่อนไปยังหมายเลข ‘1’ โครงการจึงใช้มากกว่าผู้ปฏิบัติงาน
- หุ่นยนต์ VR จะ ขับเคลื่อนไปข้างหน้าในขณะที่ ค่า X มาก กว่าพิกัดที่ระบุไว้และหยุดเมื่อค่า X น้อย กว่าค่า X ของพิกัด เนื่องจากค่า X ของหมายเลข ‘1’ คือ -900 หุ่นยนต์ VR จะหยุดขับเมื่อค่า X น้อยกว่า -900
สำหรับข้อมูลของคุณ
คำสั่ง รอ จะหยุดการทำงานของโครงการชั่วคราวเป็นระยะเวลาหนึ่งเป็นวินาที ก่อนที่จะดำเนินการต่อไปยังคำสั่งถัดไป คำสั่ง รอ สามารถใช้ในการสังเกตพฤติกรรมแต่ละอย่างในโปรเจ็กต์ของคุณที่อาจเกิดขึ้นอย่างรวดเร็วพร้อมกัน เช่น การเคลื่อนที่ระหว่างสองตำแหน่งที่แตกต่างกันในสนามเด็กเล่น คำสั่ง รอ สามารถรอได้เป็นวินาทีหรือมิลลิวินาที คำสั่งทั้งสองนี้จะหยุดการเคลื่อนไหวของหุ่นยนต์ VR เป็นเวลา 1 วินาที
รอ (1, วินาที)
รอ (1000, มิลลิวินาที)ในสนามเด็กเล่นแผนที่กริดตัวเลข คำสั่ง รอ สามารถใช้เพื่อทำให้หุ่นยนต์ VR หยุดชั่วคราวที่ตัวเลขที่ระบุก่อนที่จะย้ายไปยังตำแหน่งถัดไปในโปรเจ็กต์ได้ ในตัวอย่างนี้ คำสั่ง wait จะทำให้หุ่นยนต์ VR หยุดเป็นเวลา 2 วินาทีที่หมายเลข '5' ก่อนที่จะขับกลับไปที่หมายเลข '1'
# เพิ่มรหัสโครงการใน "main"
def main (): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position (X, MM )-100 < : drivetrain.drive
(FORWARD)
wait (5, msec) drivetrain.turn_for
(RIGHT, 180, DEGREES)
wait (1, SECONDS)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait (5, msec
) drivetrain.stop ()เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป