
Lektion 2: Fahren Sie zur Nummer '1'
-
Jetzt fährt der VR-Roboter zurück zur Nummer „1“.

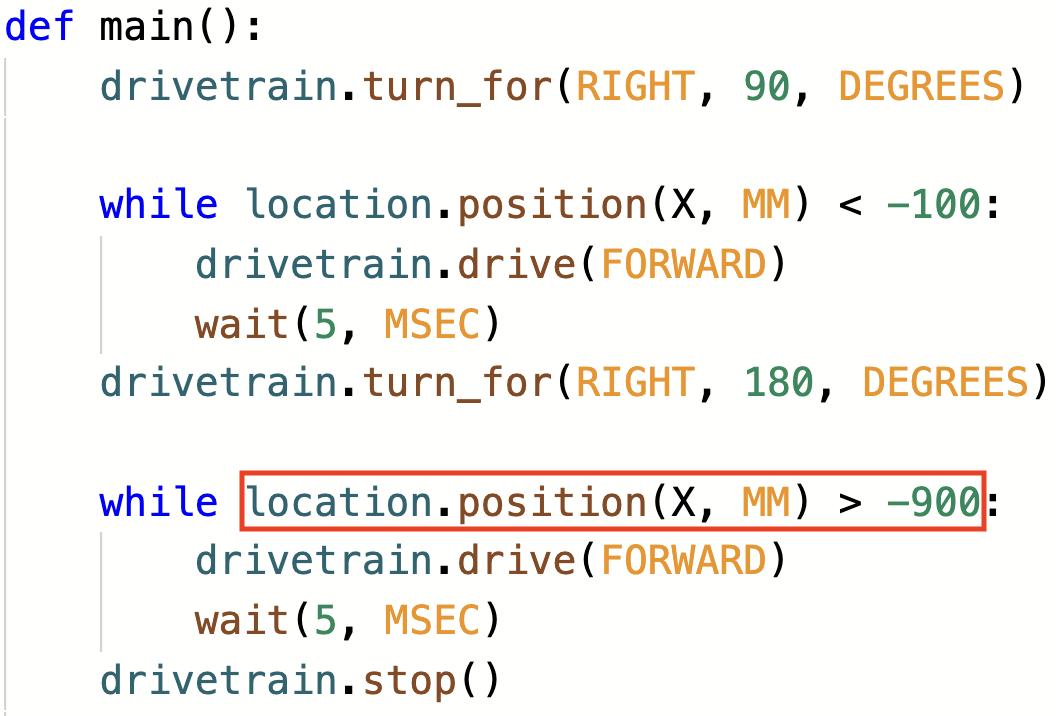
- Um den VR-Roboter zurück zur Nummer ‘1‘ zu navigieren, entfernen Sie den Stoppbefehl und ersetzen Sie ihn durch die folgenden Befehle. Ihr Projekt sollte wie folgt aussehen:
# Projektcode in "main" hinzufügen
def main(): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position (X, MM) < -100: drivetrain.drive
(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- Beachten Sie, dass die zweite WHILE-Schleife einen Operator größer als anstelle eines Operators kleiner als enthält. Dies liegt daran, dass der VR-Roboter jetzt die X-Achse herunterfährt und die Zahlen kleiner werden. Der VR-Roboter stoppt, sobald die X-Werte UNTER -900 liegen.
- Starten Sie den Number Grid Map Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
- Beobachten Sie, wie der VR-Roboter auf dem Number Grid Map Playground zur Nummer „1“ fährt.
- In diesem Projekt fährt der VR-Roboter zur Nummer ‘1‘ auf dem Number Grid Map Playground. Da die X-Werte abnehmen , wenn der VR-Roboter auf die Zahl ‘1’ fährt, verwendet das Projekt einen Größer-als-Operator.
- Der VR-Roboter fährt vorwärts, während der X-Wert größer als die Koordinate ist , auf der sich die angegebene Zahl befindet, und stoppt, sobald sein X-Wert kleiner als der X-Wert der Koordinate ist. Da der X-Wert der Zahl ‘1‘ -900 ist, hört der VR-Roboter auf zu fahren, sobald der X-Wert kleiner als -900 ist.
Zur Kenntnisnahme
Ein Wartebefehl pausiert den Projektfluss für einen bestimmten Zeitraum in Sekunden, bevor er mit dem nächsten Befehl fortfährt. Ein Wartebefehl kann verwendet werden, um einzelne Verhaltensweisen in Ihrem Projekt zu beobachten, die schnell zusammen ablaufen können, z. B. das Bewegen zwischen zwei verschiedenen Standorten auf einem Spielplatz. Ein Wartebefehl kann in Sekunden oder Millisekunden warten. Beide Befehle unterbrechen die Bewegung des VR-Roboters für 1 Sekunde.
wait(1, SEKUNDEN)
wait(1000, MS)Im Number Grid Map Playground, könnte der Befehl wait verwendet werden, um den VR-Roboter dazu zu veranlassen, bei einer bestimmten Zahl anzuhalten, bevor er zum nächsten Ort im Projekt weitergeht. In diesem Beispiel bewirkt der Befehl wait , dass der VR-Roboter für 2 Sekunden bei der Zahl „5“ anhält, bevor er zur Zahl „1“ zurückfährt.
# Projektcode in "main" hinzufügen
def main(): drivetrain.turn_for
(RIGHT, 90, DEGREES)
while location.position (X, MM) < -100: drivetrain.drive
(FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.