
Pelajaran 2: Berkendara ke Nomor '1'
-
Sekarang Robot VR akan melaju kembali ke angka '1.'

- Untuk menavigasi Robot VR kembali ke angka '1,' hapus perintah stopdan ganti dengan perintah berikut. Proyek Anda akan terlihat seperti ini:
# Tambahkan kode proyek di "utama"
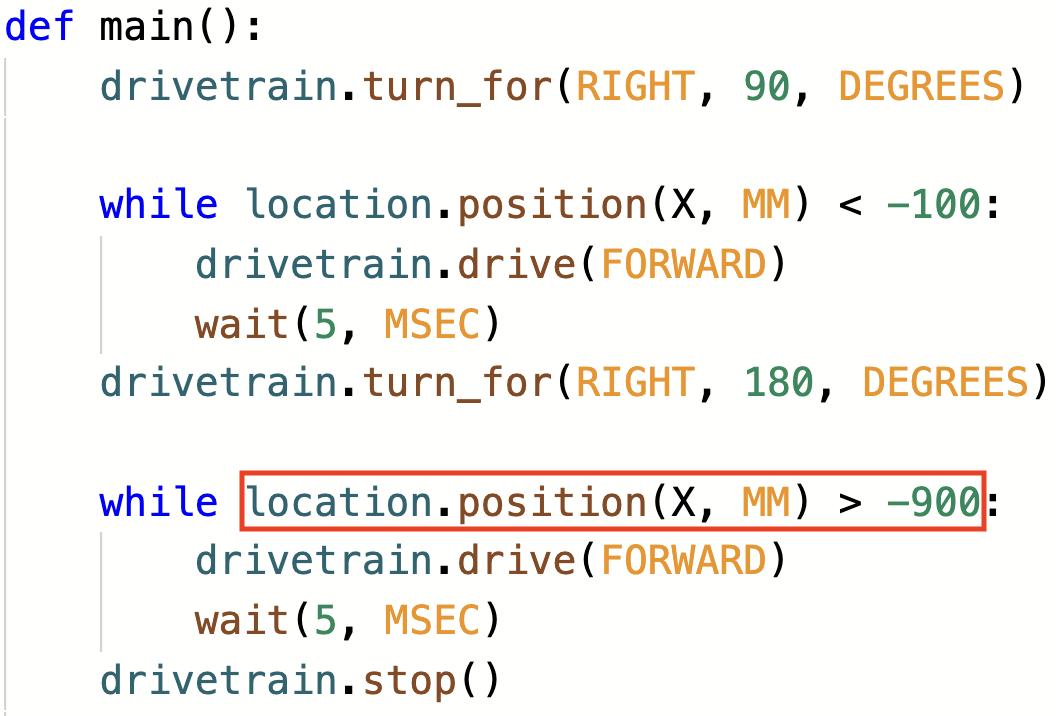
def main():
drivetrain.turn_for(KANAN, 90, DERAJAT)
while location.position(X, MM) < -100:
drivetrain.drive(MAJU)
wait(5, MSEC)
drivetrain.turn_for(KANAN, 180, DERAJAT)
while location.position(X, MM) > -900:
drivetrain.drive(MAJU)
wait(5, MSEC)
drivetrain.stop()- Perhatikan bahwa perulangan while kedua berisi operator lebih besar dari, bukan operator kurang dari. Hal ini karena Robot VR sekarang bergerak ke arah sumbu X dan angkanya menjadi lebih kecil. Robot VR akan berhenti saat nilai X KURANG dari -900.
- Luncurkan Number Grid Map Playground jika belum terbuka dan jalankan proyeknya.
- Saksikan Robot VR melaju ke angka '1' pada Peta Kotak Angka Playground.
- Dalam proyek ini, Robot VR melaju menuju angka '1' pada Peta Kotak Angka Playground. Karena nilai-X adalah berkurang saat Robot VR melaju ke angka '1', proyek menggunakan operator lebih besar dari.
- Robot VR akan bergerak maju saat nilai X bernilai lebih besar daripada koordinat tempat angka yang ditunjukkan berada, dan berhenti saat nilai X bernilai kurang daripada nilai X koordinat tersebut. Karena nilai X dari angka '1' adalah -900, Robot VR akan berhenti melaju jika nilai X-nya kurang dari -900.
Untuk Informasi Anda
Perintah waitakan menghentikan aliran proyek selama periode waktu tertentu dalam hitungan detik sebelum beralih ke perintah berikutnya. Perintah waitdapat digunakan untuk membantu mengamati perilaku individual dalam proyek Anda yang mungkin berjalan cepat bersamaan, seperti berpindah di antara dua lokasi berbeda di Playground. Perintahwaitdapat menunggu dalam hitungan detik atau milidetik. Kedua perintah ini akan menghentikan pergerakan Robot VR selama 1 detik.
tunggu(1, DETIK)
tunggu(1000, MSEC)Di Playground Peta Kotak Angka, perintahtunggudapat digunakan untuk menyebabkan Robot VR berhenti pada angka tertentu sebelum berpindah ke lokasi berikutnya dalam proyek. Dalam contoh ini, perintahwaitakan membuat Robot VR berhenti selama 2 detik pada angka '5', sebelum kembali ke angka '1'.
# Tambahkan kode proyek di "utama"
def main():
drivetrain.turn_for(KANAN, 90, DERAJAT)
while location.position(X, MM) < -100:
drivetrain.drive(MAJU)
wait(5, MSEC)
drivetrain.turn_for(KANAN, 180, DERAJAT)
wait(1, DETIK)
while location.position(X, MM) > -900:
drivetrain.drive(MAJU)
wait(5, MSEC)
drivetrain.stop()Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.