
পাঠ ২: '১' নম্বরে গাড়ি চালান
-
এখন VR রোবট '1' নম্বরে ফিরে যাবে।

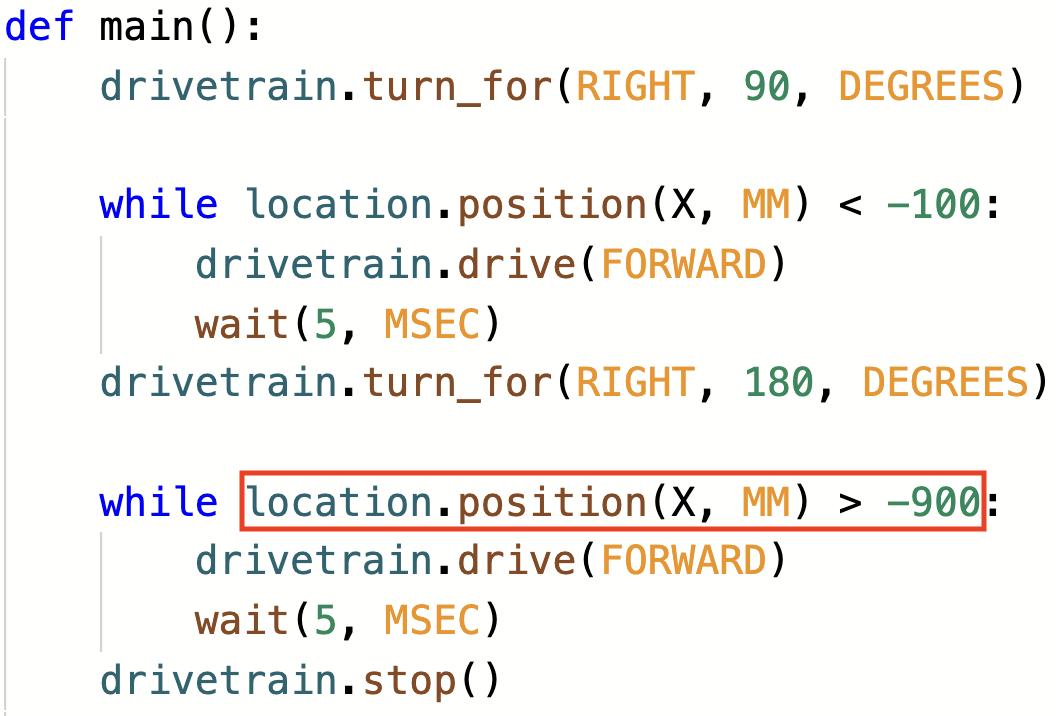
- ভিআর রোবটকে '1' নম্বরে ফিরিয়ে আনতে, stopকমান্ডটি সরিয়ে নিম্নলিখিত কমান্ডগুলি দিয়ে প্রতিস্থাপন করুন। আপনার প্রকল্পটি দেখতে এরকম হওয়া উচিত:
# "main" তে প্রোজেক্ট কোড যোগ করুন
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- মনে রাখবেন যে দ্বিতীয় while লুপে less than অপারেটরের পরিবর্তে greater than অপারেটর রয়েছে। এর কারণ হল VR রোবট এখন X অক্ষের নিচে চলে যাচ্ছে এবং সংখ্যাগুলি ছোট হয়ে যাচ্ছে। X-মানগুলি -900-এর থেকে কম হলে VR রোবট বন্ধ হয়ে যাবে৷
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে ভিআর রোবট ড্রাইভ দেখুন।
- এই প্রকল্পে, ভিআর রোবটটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে চলে যায়। যেহেতু VR রোবট '1' নম্বরে যাওয়ার কারণে X-মান কমছে , প্রকল্পটি অপারেটরের চেয়ে বড় একটি ব্যবহার করে।
- VR রোবটটি তখনই এগিয়ে যাবে যখন X-মান নির্দেশিত সংখ্যাটি যে স্থানাঙ্কে আছে তার চেয়ে বেশি হবে এবং যখন এর X-মান স্থানাঙ্কের X-মানের চেয়ে কম হবে তখনই থামবে। যেহেতু '1' নম্বরের X-মান -900, X-মান -900-এর কম হলে VR রোবট গাড়ি চালানো বন্ধ করবে৷
আপনার তথ্যের জন্য
একটি waitকমান্ড পরবর্তী কমান্ডে যাওয়ার আগে কয়েক সেকেন্ডের মধ্যে একটি নির্দিষ্ট সময়ের জন্য প্রকল্পের প্রবাহকে থামিয়ে দেবে। আপনার প্রকল্পের বিভিন্ন আচরণ পর্যবেক্ষণ করতে waitকমান্ড ব্যবহার করা যেতে পারে যা দ্রুত একসাথে চলতে পারে, যেমন খেলার মাঠে দুটি ভিন্ন অবস্থানের মধ্যে স্থানান্তর। একটিwaitকমান্ড সেকেন্ড বা মিলিসেকেন্ডে অপেক্ষা করতে পারে। এই দুটি কমান্ডই 1 সেকেন্ডের জন্য VR রোবটের গতিবিধি থামিয়ে দেবে।
অপেক্ষা করুন (১, সেকেন্ড)
অপেক্ষা করুন (১০০০, এমএসইসি)নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডে,waitকমান্ড ব্যবহার করে VR রোবটকে প্রকল্পের পরবর্তী স্থানে যাওয়ার আগে একটি নির্দিষ্ট নম্বরে থামতে বলা যেতে পারে। এই উদাহরণে,waitকমান্ডটি VR রোবটকে '5' নম্বরে 2 সেকেন্ডের জন্য থামাতে বাধ্য করবে, তারপর '1' নম্বরে ফিরে যাবে।
# "main" তে প্রোজেক্ট কোড যোগ করুন
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position(X, MM) < -100:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position(X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।