
Lección 2: Conducir al número '1'
-
Ahora el robot VR volverá al número ‘1’.

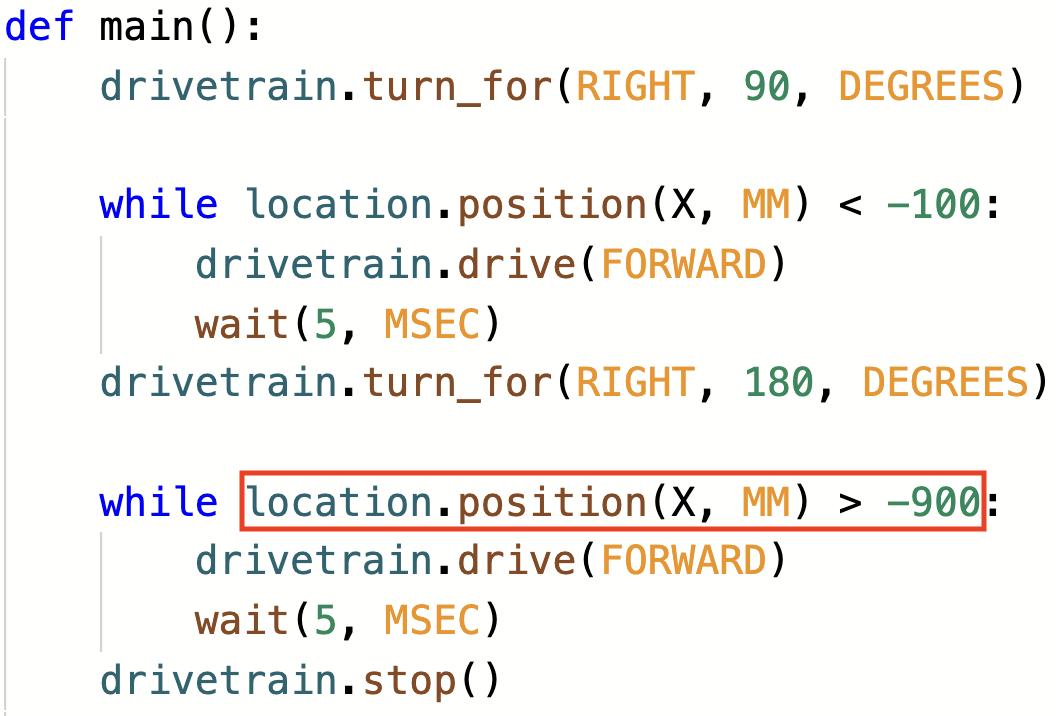
- Para navegar el robot VR de regreso al número '1', elimine el comando stop y reemplácelo con los siguientes comandos. Tu proyecto debería verse así:
# Add project code in "main"
def main():
drivetrain.turn_for(RIGHT, 90, DEGREES)
while location.position (X, MM) < -100:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
while location.position (X, MM) > -900:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- Tenga en cuenta que el segundo bucle while contiene un operador mayor que en lugar de un operador menor que. Esto se debe a que el robot VR ahora está conduciendo por el eje X y los números son cada vez más pequeños. El robot VR se detendrá una vez que los valores X sean INFERIORES a -900.
- Inicie Number Grid Map Playground si aún no está abierto y ejecute el proyecto.
- Observe cómo el robot VR conduce al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica.
- En este proyecto, el robot VR conduce al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica. Dado que los valores X están disminuyendo a medida que el robot VR llega al número ‘1’, el proyecto utiliza un operador mayor que.
- El robot VR avanzará mientras el valor X sea mayor que la coordenada en la que está el número indicado y se detendrá una vez que su valor X sea menor que el valor X de la coordenada. Dado que el valor X del número ‘1’ es -900, el Robot VR dejará de funcionar una vez que el valor X sea inferior a -900.
Para su información
Un comando wait pausará el flujo del proyecto durante un período de tiempo específico en segundos antes de pasar al siguiente comando. Se puede usar un comando wait para ayudar a observar comportamientos individuales en su proyecto que pueden ejecutarse rápidamente juntos, como moverse entre dos ubicaciones diferentes en un patio de juegos. Un comando wait puede esperar en segundos o milisegundos. Ambos comandos pausarán el movimiento del robot de realidad virtual durante 1 segundo.
espera(1, SEGUNDOS)
espera(1000, MS)En el mapa de cuadrícula de números , el comando esperar se podría usar para hacer que el robot VR se detenga en un número específico antes de pasar a la siguiente ubicación en el proyecto. En este ejemplo, el comando esperar hará que el robot VR se detenga durante 2 segundos en el número "5", antes de regresar al número "1".
# Add project code in "main"
def main():
drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop()Seleccione el botón Siguiente para continuar con el resto de esta lección.