
Lezione 2: Guida verso il numero "1"
-
Ora il robot VR tornerà al numero "1".

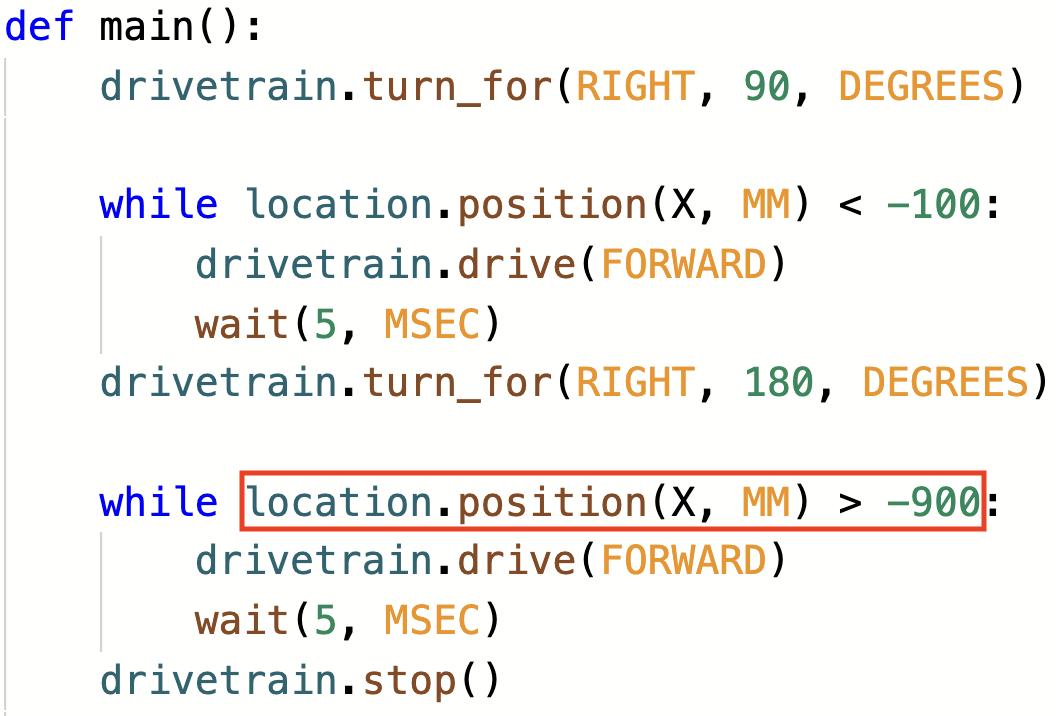
- Per riportare il robot VR al numero "1", rimuovere il comando stop e sostituirlo con i seguenti comandi. Il tuo progetto dovrebbe essere simile a questo:
# Add project code in "main"
def main():
drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop()- Si noti che il secondo ciclo while contiene un operatore maggiore di invece di un operatore minore di. Questo perché il robot VR sta ora guidando lungo l'asse X e i numeri stanno diventando più piccoli. Il robot VR si fermerà una volta che i valori X sono INFERIORI a -900.
- Avviare il Number Grid Map Playground se non è già aperto ed eseguire il progetto.
- Guarda il robot VR guidare al numero "1" nel parco giochi della mappa della griglia dei numeri.
- In questo progetto, il robot VR si sposta sul numero "1" nel parco giochi della mappa della griglia dei numeri. Poiché i valori X stanno diminuendo mentre il robot VR passa al numero "1", il progetto utilizza un operatore maggiore di.
- Il robot VR avanzerà mentre il valore X è maggiore della coordinata su cui si trova il numero indicato e si fermerà una volta che il suo valore X è inferiore al valore X della coordinata. Poiché il valore X del numero "1" è -900, il robot VR smetterà di guidare una volta che il valore X è inferiore a -900.
Per tua informazione
Un comando wait metterà in pausa il flusso del progetto per un periodo di tempo specifico in secondi prima di passare al comando successivo. Un comando wait può essere utilizzato per osservare singoli comportamenti nel progetto che potrebbero essere eseguiti rapidamente insieme, come ad esempio lo spostamento tra due posizioni diverse in un Playground. Un comando di attesa può attendere in secondi o millisecondi. Entrambi questi comandi metteranno in pausa il movimento del robot VR per 1 secondo.
wait(1, SECONDI)
wait(1000, MSEC)Nel Playground della mappa della griglia numerica , il comando wait potrebbe essere utilizzato per far sì che il robot VR si fermi su un numero specifico prima di passare alla posizione successiva nel progetto. In questo esempio, il comando wait farà sì che il robot VR si fermi per 2 secondi sul numero '5', prima di tornare al numero '1'.
# Add project code in "main"
def main():
drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.turn_for (RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop()Selezionare il pulsante Avanti per continuare con il resto della lezione.