
Lição 2: Dirija para o número '1'
-
Agora, o robô VR voltará para o número ‘1’.

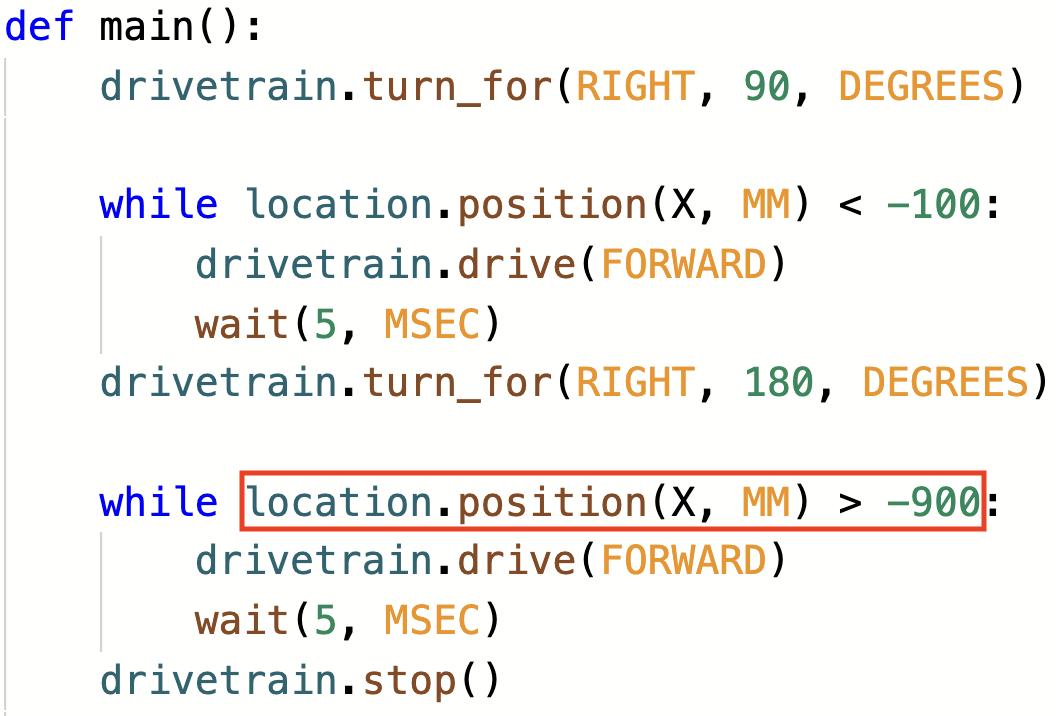
- Para navegar o robô VR de volta para o número '1', remova o comando stop e substitua-o pelos comandos seguintes. O seu projeto deve ter este aspeto:
# Adicione o código do projeto em "main"
def main(
): drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100
: drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.turn_for (RIGHT, 180, DEGREES)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop()- Note-se que o segundo ciclo while contém um operador maior que em vez de um operador menor que. Isso ocorre porque o Robô VR está agora dirigindo pelo eixo X e os números estão cada vez menores. O Robô VR irá parar quando os valores X forem INFERIORES a -900.
- Inicie o Number Grid Map Playground se ainda não estiver aberto e execute o projeto.
- Assista ao Robô VR dirigir para o número ‘1’ no Playground Number Grid Map.
- Neste projeto, o Robô de RV dirige para o número ‘1’ no Playground do Mapa de Grade Numérica. Uma vez que os valores X estão diminuindo à medida que o Robô VR dirige para o número ‘1’, o projeto usa um operador maior que.
- O Robô VR avançará enquanto o valor X for maior que a coordenada em que o número indicado está ligado e parará assim que seu valor X for menor que o valor X da coordenada. Como o valor X do número ‘1’ é -900, o Robô VR parará de dirigir quando o valor X for inferior a -900.
Para sua informação
Um comando wait irá pausar o fluxo do projeto durante um período de tempo específico em segundos antes de passar para o comando seguinte. Um comando wait pode ser utilizado para ajudar a observar comportamentos individuais no seu projeto que podem ser executados rapidamente em conjunto, como por exemplo, mover-se entre dois locais diferentes num Parque Infantil. Um comando de espera pode esperar em segundos ou milissegundos. Ambos os comandos pausarão o movimento do Robô VR por 1 segundo.
aguarde(1, SEGUNDOS)
aguarde(1000, MSEG)No Number Grid Map Playground, o comando wait pode ser utilizado para fazer com que o VR Robot faça uma pausa num número específico antes de passar para o próximo local do projeto. Neste exemplo, o comando wait fará com que o VR Robot pare durante 2 segundos no número '5', antes de voltar ao número '1'.
# Adicione o código do projeto em "main"
def main(
): drivetrain.turn_for (RIGHT, 90, DEGREES)
while location.position (X, MM) < -100
: drivetrain.drive (FORWARD)
wait(5, MSEC
) drivetrain.turn_for (RIGHT, 180, DEGREES)
wait(1, SECONDS)
while location.position (X, MM) > -900:
drivetrain.drive (FORWARD)
wait(5, MSEC)
drivetrain.stop()Selecione o botão Seguinte para continuar com o resto desta lição.