
في الدرس السابق، تعلمت كيفية استخدام أداة حامل القلم وترميز ذراع 6 محاور لرسم خط على السبورة البيضاء. في هذا الدرس، ستستمر في استخدام القلم أثناء تعلمك التحكم في مسار الذراع المكون من 6 محاور من أجل التحرك حول العقبات. سوف تتعلم:
- كيفية تحديد نقطة طريق لتحريك الذراع سداسي المحاور حول عقبة.
- كيفية ترميز ذراع 6 محاور للسفر في مسار يتم التحكم فيه باستخدام نقطة طريق.
في نهاية هذا الدرس، ستحدد نقطة الطريق المطلوبة وترميز ذراع 6 محاور للتحرك حول عقبة.
لماذا تتحكم في مسار الذراع سداسي المحاور ؟
تخيل أذرع روبوتية متعددة تعمل معًا لتجميع منتج على خط تجميع. يجب أن تتنقل الأذرع الروبوتية بسرعة حول بعضها البعض بدرجة عالية من الدقة. يجب أن يسير كل ذراع في مساره المعقد حتى تنجح العملية. يتم تحقيق ذلك من خلال التحكم في مسار كل ذراع عن طريق ترميزه للسفر على طول سلسلة من نقاط الطريق. هذا يمنع الذراعين من الاصطدام ببعضهما البعض أو بالمنتج الذي يتم تجميعه.

في السابق، قمت بترميز ذراع 6 محاور للانتقال من نقطة إلى أخرى في خط مستقيم. ومع ذلك، لم تكن هناك عقبات لمنع ذراع 6 محاور من الانتقال مباشرة من موقع إلى آخر. في هذا الدرس، ستكون هناك عقبة، لذلك ستحتاج إلى تحديد نقطة طريق تسمح لك بترميز ذراع 6 محاور للتنقل حول العقبة.
ترميز الذراع المكون من 6 محاور لاتباع مسار خاضع للرقابة
يجب أن يتحرك ذراع 6 محاور من النقطة أ إلى النقطة ب، ولكن هناك عقبة مباشرة بين النقطتين.

لهذا السبب، يجب أن تجد نقطة طريق للسماح لك بترميز ذراع 6 محاور للتحرك حول العقبة حتى يصل ذراع 6 محاور إلى وجهته. نقطة الطريق هي نقطة وسيطة بين موقعين على خط سير. في الصورة أدناه، النقطة C هي نقطة طريق. بدلاً من الانتقال مباشرة من النقطة أ إلى النقطة ب، يمكن للذراع سداسي المحاور الانتقال من النقطة أ، إلى النقطة ج، ثم إلى النقطة ب، لتجنب الاصطدام بالعائق.

لمعلوماتك
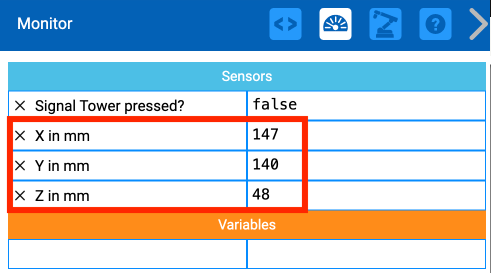
يمكن أن تكون الشاشة في VEXcode EXP مفيدة في تحديد موقع إحداثيات محددة على السبورة البيضاء. سيتم تحديث قيم الإحداثيات x و y و z في الوقت الفعلي على الشاشة حيث يتم تحريك ذراع 6 محاور يدويًا، مما يسمح لك بالعثور بسهولة على نقاط محددة (كما هو الحال في الخطوة 1 أدناه).
إيجاد نقطة طريق
قم بإعداد السبورة البيضاء الخاصة بك كما هو موضح هنا. تأكد من استخدام قلم لوح أبيض للكتابة على السبورة البيضاء.
تقع النقطة A عند (150، 50، 0) تقريبًا.
تقع النقطة B عند (50، 150، 0) تقريبًا.

ارسم خطًا من النقطة B إلى أسفل السبورة البيضاء، بالتوازي مع المحور x.

بعد ذلك، ارسم خطًا من النقطة A إلى حافة السبورة البيضاء، بالتوازي مع المحور y.

تقاطع هذين الخطين هو نقطة طريقك. ضع علامة على التقاطع وقم بتسمية النقطة ج.
ستسمح هذه النقطة بالخلوص للذراع سداسي المحاور للانتقال من النقطة أ إلى النقطة ب دون الاصطدام بالعائق.

بعد ذلك، ستحتاج إلى تحديد إحداثيات النقطة C. ستجد الإحداثي x أولاً.
قم بقياس المسافة بين النقطتين B و C وسجلها في دفتر ملاحظاتك الهندسي.
ملاحظة: هذه القياسات تقريبية، وقد تختلف قياساتك قليلاً. تأكد من استخدام قياساتك في حساباتك.

يمكننا استخدام الإحداثي x المعروف للنقطة B، والمسافة المقاسة التي يحتاجها ذراع 6 محاور للتحرك على طول المحور x، لإيجاد الإحداثي x للنقطة C.
في هذه الصيغة، تمثل "الدلتا" تغييرًا في القيم. المسافة التي قمت بقياسها هي التغير في قيم x بين النقطتين B و C.

أدخل قيمك لحساب الإحداثي x للنقطة C في دفتر ملاحظاتك الهندسي.
في هذا المثال، يكون الإحداثي x لـ C هو 163 مم.

اتبع نفس العملية للعثور على الإحداثي y للنقطة C. أولاً، قم بقياس المسافة بين النقطة A والنقطة C وسجلها في دفتر ملاحظاتك الهندسي. هذه هي المسافة على طول المحور y التي يحتاج ذراعك ذو 6 محاور إلى تحريكها.

يمكننا استخدام الإحداثي y المعروف للنقطة A، والمسافة المقاسة التي يحتاجها ذراع 6 محاور للتحرك على طول المحور y، لإيجاد الإحداثي y للنقطة C.
في هذه الصيغة، تمثل "الدلتا" تغييرًا في القيم. المسافة التي قمت بقياسها هي التغير في قيم y بين النقطتين A و C.

أدخل قيمك لحساب الإحداثي y للنقطة C في دفتر ملاحظاتك الهندسي.
في هذا المثال، يكون الإحداثي y لـ C هو 165 مم.
ترميز الذراع سداسي المحاور للسفر حول العقبة
الآن بعد أن حددت إحداثيات النقطة C، حان الوقت لإنشاء مشروع خبرة VEXcode لذراع 6 محاور للانتقال من النقطة A إلى النقطة B، عبر نقطة الطريق، النقطة C.

افتح مشروعك من الدرس 1 في VEXcode EXP. ستقوم بتعديل هذا المشروع عن طريق إضافة كتلة نقل إلى الموضع من أجل ترميز ذراع 6 محاور للانتقال من النقطة A إلى النقطة C، ثم إلى النقطة B.

اسحب كتلة نقل إلى الموضع إضافية إلى مساحة العمل. أدخل إحداثيات x و y التي حسبتها سابقًا في معلمات الكتلة.

ضع في اعتبارك المسار الذي يجب أن يسلكه ذراع 6 محاور. أولاً ينتقل القلم إلى النقطة A، ثم ينتقل إلى النقطة C. لذلك، يجب إدخال كتلة الانتقال إلى الموضع الجديدة في المشروع بين كتلتي الانتقال إلى الموضع.

أعد تسمية مشروعك، ثم احفظه على جهازك.
في دفترك الهندسي، سجل المسار الذي تعتقد أن ذراع 6 محاور سيسلكه عند تشغيل المشروع. يمكنك القيام بذلك بالرسم أو بالكلمات.
تأكد من توصيل ذراع 6 محاور برمز VEX. قم بتشغيل مشروعك.
سيتجنب الذراع سداسي المحاور الاصطدام بالعائق من خلال الالتفاف حوله. سوف ينتقل من النقطة "أ" إلى النقطة "ج" وينتهي عند النقطة "ب".
شاهد هذا الفيديو لمشاهدة مثال على ذراع 6 محاور تتحرك في هذا المسار.
النشاط
الآن بعد أن تعلمت العثور على نقطة طريق وترميز الروبوت للسفر باستخدامه، سوف تتدرب على هذه المهارة. في هذا النشاط، ستنشئ مشروعًا للذراع سداسي المحاور للتحرك في مسار يتم التحكم فيه من نقطة جديدة إلى نقطة جديدة أخرى، دون الاصطدام بالعقبة.

- الإعداد: ارسم موقعي البداية والنهاية (A و B) على السبورة البيضاء كما هو
موضح أعلاه. يمكنك استخدام الإحداثيات الموضحة في الصورة لمساعدتك في إعداد النشاط.
- تقع النقطة أ عند (175، 0، 0) تقريبًا
- تقع النقطة B تقريبًا عند (-25، 150، 0)
- ضع عقبة بين النقطتين A و B. في الصورة أعلاه تقع العقبة (مكعب) عند (100، 125، 0) تقريبًا
- النشاط: إنشاء مشروع خبرة VEXcode للذراع سداسي المحاور للانتقال من
النقطة A إلى النقطة B دون الاصطدام بالعقبة. استخدم نقطة طريق للقيام بذلك.
- قم بتشغيل مشروعك لاختباره. هل ينتقل بنجاح من النقطة أ إلى النقطة ب دون الاصطدام بالعائق ؟ إذا لم يكن الأمر كذلك، فقم بتعديل مشروعك واختباره مرة أخرى.
- سجل العملية التي استخدمتها للعثور على نقطة الطريق في دفتر الملاحظات الهندسي الخاص بك، وقم بتضمين تفاصيل حول كيفية استخدامك لهذه المعلومات في مشروعك.
تحقق من فهمك
قبل الانتقال إلى الدرس التالي، تأكد من فهمك للمفاهيم الواردة في هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
حدد التالي > لإكمال انعكاس الوحدة الوسطى.