
Dans la leçon précédente, vous avez appris à utiliser l'outil Porte-stylo et à coder le bras à 6 axes pour dessiner une ligne sur le tableau blanc. Dans cette leçon, vous continuerez à utiliser le stylo tout en apprenant à contrôler la trajectoire du bras à 6 axes afin de contourner les obstacles. Vous apprendrez :
- comment identifier un point de cheminement pour déplacer le bras à 6 axes autour d'un obstacle.
- comment coder le bras à 6 axes pour voyager dans une trajectoire contrôlée à l'aide d'un point de cheminement.
À la fin de cette leçon, vous déterminerez le point de cheminement nécessaire et coderez le bras à 6 axes pour contourner un obstacle.
Pourquoi contrôler la trajectoire du bras à 6 axes ?
Imaginez plusieurs bras robotisés travaillant ensemble pour assembler un produit sur une chaîne de montage. Les bras robotisés doivent naviguer rapidement les uns autour des autres avec un haut degré de précision. Chaque bras doit parcourir son propre chemin compliqué pour que l'opération réussisse. Ceci est accompli en contrôlant la trajectoire de chaque bras en le codant pour qu'il se déplace le long d'une série de points de cheminement. Cela empêche les bras d'entrer en collision les uns avec les autres ou avec le produit qu'ils assemblent.

Auparavant, vous avez codé le bras à 6 axes pour qu'il se déplace d'un point à un autre en ligne droite. Cependant, aucun obstacle n'empêchait le bras à 6 axes de se déplacer directement d'un endroit à un autre. Dans cette leçon, il y aura un obstacle présent, vous devrez donc identifier un point de cheminement qui vous permettra de coder le bras à 6 axes pour naviguer autour de l'obstacle.
Codage du bras à 6 axes pour suivre un chemin contrôlé
Le bras à 6 axes doit se déplacer du point A au point B, mais il y a un obstacle directement entre les deux points.

Pour cette raison, vous devez trouver un point de cheminement pour vous permettre de coder le bras à 6 axes pour contourner l'obstacle afin que le bras à 6 axes atteigne sa destination. Un point de cheminement est un point intermédiaire entre deux emplacements sur une ligne de déplacement. Dans l'image ci-dessous, le point C est un point de cheminement. Au lieu de se déplacer directement d'un point A à un point B, le bras à 6 axes peut se déplacer d'un point A à un point C, puis à un point B, afin d'éviter une collision avec l'obstacle.

Pour votre information
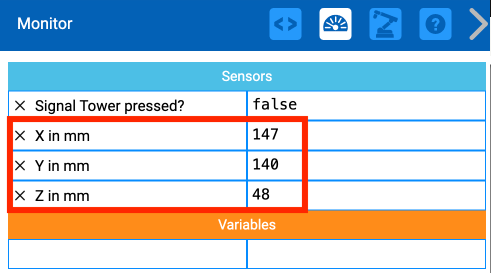
Le moniteur dans VEXcode EXP peut être utile pour localiser des coordonnées spécifiques sur le tableau blanc. Les valeurs de coordonnées x, y, z seront mises à jour en temps réel sur le moniteur lorsque le bras à 6 axes est déplacé manuellement, ce qui vous permettra de trouver facilement des points spécifiques (comme à l'étape 1, ci-dessous).
Trouver un point de cheminement
Configurez votre tableau blanc comme indiqué ici. Assurez-vous d'utiliser un marqueur de tableau blanc pour écrire sur le tableau blanc.
Le point A est situé à environ (150, 50, 0).
Le point B est situé à environ (50, 150, 0).

Tracez une ligne allant du point B au bas du tableau blanc, parallèlement à l'axe des x.

Ensuite, tracez une ligne allant du point A au bord du tableau blanc, parallèle à l'axe des y.

L'intersection de ces deux lignes est votre point de passage. Marquer l'intersection et l'étiqueter point C.
Ce point permettra au bras à 6 axes de se déplacer du point A au point B sans heurter l'obstacle.

Ensuite, vous devrez déterminer les coordonnées du point C. Vous trouverez d'abord la coordonnée x.
Mesurez la distance entre les points B et C et enregistrez-la dans votre cahier d'ingénierie.
Remarque : ces mesures sont approximatives, les vôtres peuvent varier légèrement. Assurez-vous d'utiliser vos mesures dans vos calculs.

Nous pouvons utiliser la coordonnée x connue du point B, et la distance mesurée dont le bras à 6 axes a besoin pour se déplacer le long de l'axe x, pour trouver la coordonnée x du point C.
Dans cette formule, le « delta » représente un changement de valeurs. La distance que vous avez mesurée est la variation des valeurs x entre les points B et C.

Entrez vos valeurs pour calculer la coordonnée x du point C dans votre cahier d'ingénierie.
Dans cet exemple, la coordonnée x de C est de 163 mm.

Suivez le même processus pour trouver la coordonnée y du point C. Tout d'abord, mesurez la distance entre le point A et le point C et enregistrez-la dans votre cahier d'ingénierie. Il s'agit de la distance le long de l'axe y que votre bras à 6 axes doit déplacer.

Nous pouvons utiliser la coordonnée y connue du point A, et la distance mesurée dont le bras à 6 axes a besoin pour se déplacer le long de l'axe y, pour trouver la coordonnée y du point C.
Dans cette formule, le « delta » représente un changement de valeurs. La distance que vous avez mesurée est la variation des valeurs y entre les points A et C.

Entrez vos valeurs pour calculer la coordonnée y du point C dans votre cahier d'ingénierie.
Dans cet exemple, la coordonnée y de C est 165 mm.
Codage du bras à 6 axes pour contourner l'obstacle
Maintenant que vous avez déterminé les coordonnées du point C, il est temps de créer un projet EXP VEXcode pour que le bras à 6 axes se déplace du point A au point B, via le point de cheminement, le point C.

Ouvrez votre projet de la leçon 1 dans VEXcode EXP. Vous allez modifier ce projet en ajoutant un bloc Déplacer vers la position afin de coder le bras à 6 axes pour voyager du point A au point C, puis au point B.

Faites glisser un déplacement supplémentaire pour positionner le bloc dans l'espace de travail. Entrez les coordonnées x et y que vous avez calculées précédemment dans les paramètres du bloc.

Considérez le chemin que le bras à 6 axes doit prendre. Tout d'abord, le stylo se déplace vers le point A, puis il se déplace vers le point C. Ainsi, le nouveau bloc Déplacer en position devra être inséré dans le projet entre les deux blocs Déplacer en position.

Renommez votre projet, puis enregistrez-le sur votre appareil.
Dans votre cahier d'ingénierie, enregistrez le chemin que vous pensez que le bras à 6 axes empruntera lorsque le projet sera exécuté. Vous pouvez le faire avec un dessin ou avec des mots.
Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez votre projet.
Le bras à 6 axes évitera d'entrer en collision avec l'obstacle en le contournant. Il se déplacera du point A au point de cheminement C et se terminera au point B.
Regardez cette vidéo pour voir un exemple du bras à 6 axes se déplaçant dans ce sens.
Activité
Maintenant que vous avez appris à trouver un point de cheminement et à coder le robot pour voyager en l'utilisant, vous allez pratiquer cette compétence. Dans cette activité, vous allez créer un projet pour que le bras à 6 axes se déplace dans un chemin contrôlé d'un nouveau point à un autre nouveau point, sans entrer en collision avec l'obstacle.

- Configuration : dessinez les emplacements de début et de fin (A et B)
sur le tableau blanc comme indiqué ci-dessus. Vous pouvez utiliser les coordonnées
indiquées dans l'image pour vous aider à configurer l'activité.
- Le point A est situé à environ (175, 0, 0)
- Le point B est situé à environ (-25, 150, 0)
- Définissez un obstacle entre les points A et B. Dans l'image ci-dessus, l'obstacle (un Cube) est situé à environ (100, 125, 0)
- Activité : Créez un projet EXP VEXcode pour que le bras à 6 axes
se déplace d'un point A à un point B sans entrer en collision avec l'obstacle. Utilisez
un point de cheminement pour le faire.
- Exécutez votre projet pour le tester. Se déplace-t-il avec succès d'un point A à un point B sans entrer en collision avec l'obstacle ? Sinon, modifiez votre projet et testez-le à nouveau.
- Enregistrez le processus que vous avez utilisé pour trouver le point de cheminement dans votre carnet d'ingénierie et incluez des détails sur la façon dont vous avez utilisé ces informations dans votre projet.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour terminer la réflexion au milieu de l'unité.