
Ders 2: Bir Yol Noktası Bulma
Önceki Derste Kalem Tutucu Aracını nasıl kullanacağınızı ve Beyaz Tahtaya çizgi çizmek için 6 Eksenli Kolu nasıl kodlayacağınızı öğrendiniz. Bu Derste, engellerin etrafından dolaşmak için 6 Eksenli Kolun yolunu kontrol etmeyi öğrenirken Kalemi kullanmaya devam edeceksiniz. Öğreneceksiniz:
- 6 Eksenli Kolu bir engelin etrafında hareket ettirmek için bir geçiş noktasının nasıl belirleneceği.
- 6 Eksenli Kolun bir geçiş noktası kullanarak kontrollü bir yolda hareket etmesi için nasıl kodlanacağı.
Bu Dersin sonunda, gerekli geçiş noktasını belirleyecek ve 6 Eksenli Kolu bir engelin etrafından hareket ettirecek şekilde kodlayacaksınız.
6 Eksenli Kolun çizgileri çizmek için yol noktalarını nasıl kullandığını görmek için aşağıdaki animasyonu izleyin. Öncelikle 6 Eksenli Kol, iki geçiş noktasını birleştiren çapraz bir çizgi çizer ve daha sonra, küpün Döşeme üzerine yerleştirilmesini önlemek için üç geçiş noktasını dik açıyla birleştirir.
6 Eksenli Kolun Yolunu Neden Kontrol Etmeliyiz?
Bir montaj hattında bir ürünü bir araya getirmek için birlikte çalışan birden fazla robotik kolu hayal edin. Robotik kolların birbirlerinin etrafında yüksek doğrulukla hızlı bir şekilde hareket edebilmeleri gerekiyor. Ameliyatın başarılı olabilmesi için her kolun kendi karmaşık yolundan geçmesi gerekiyor. Bu, her bir kolun yolunun, bir dizi geçiş noktası boyunca seyahat edecek şekilde kodlanarak kontrol edilmesiyle gerçekleştirilir. Bu sayede kolların birbirine veya monte ettikleri ürüne çarpması önleniyor.

Daha önce 6 Eksenli Kolu düz bir çizgide bir noktadan diğerine gidecek şekilde kodlamıştınız. Ancak 6 Eksenli Kol'un bir yerden başka bir yere doğrudan gitmesini engelleyecek hiçbir engel bulunmuyordu. Bu Derste, bir engel mevcut olacak, bu nedenle 6 Eksenli Kolu engelin etrafından dolaşacak şekilde kodlamanıza olanak sağlayacak bir geçiş noktası belirlemeniz gerekecektir.
6 Eksenli Kolun Kontrollü Bir Yolu Takip Etmesi İçin Kodlanması
6 Eksenli Kolun A noktasından B noktasına hareket etmesi gerekiyor ancak iki nokta arasında doğrudan bir engel var.

Bu nedenle, 6 Eksenli Kolun hedefine ulaşması için, 6 Eksenli Kolun engel etrafından hareket etmesini sağlayacak bir geçiş noktası bulmanız gerekir. Bir yol noktası, seyahat hattı üzerindeki iki konum arasındaki ara noktadır. Aşağıdaki görselde C noktası bir geçiş noktasıdır. 6 Eksenli Kol, A noktasından B noktasına doğrudan gitmek yerine, engele çarpmamak için A noktasından C noktasına ve ardından B noktasına gidebilir.

Bilginize
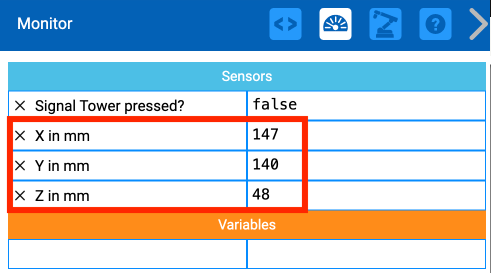
VEXcode EXP'deki Monitör, Beyaz Tahtada belirli koordinatları bulmada yardımcı olabilir. 6 Eksenli Kol manuel olarak hareket ettirildikçe x, y, z koordinat değerleri Monitörde gerçek zamanlı olarak güncellenecek ve böylece belirli noktaları kolayca bulabilirsiniz (aşağıdaki 1. Adımda olduğu gibi).
Bir Yol Noktası Bulma
Beyaz Tahtanızı burada gösterildiği gibi ayarlayın. Beyaz Tahtaya yazarken mutlaka beyaz tahta kalemi kullanın.
A noktası yaklaşık olarak (150, 50, 0) noktasında bulunmaktadır.
B noktası yaklaşık olarak (50, 150, 0) noktasında bulunmaktadır.
B noktasından Beyaz Tahtanın alt kısmına x eksenine paralel bir çizgi çizin.

Daha sonra A noktasından Beyaz Tahtanın kenarına y eksenine paralel bir çizgi çizin.

Bu iki çizginin kesiştiği nokta sizin yol noktanızdır. Kesişim noktasını işaretleyin ve C noktası olarak adlandırın.
Bu nokta, 6 Eksenli Kolun engele çarpmadan A noktasından B noktasına hareket edebilmesi için boşluk sağlayacaktır.

Daha sonra C noktasının koordinatlarını belirlemeniz gerekecek. İlk önce x koordinatını bulacaksınız.
B ve C noktaları arasındaki mesafeyi ölçün ve mühendislik defterinize kaydedin.
Not:Bu ölçümler yaklaşıktır, sizin ölçümleriniz biraz farklılık gösterebilir. Hesaplamalarınızda ölçümlerinizi kullanmaya dikkat edin.

B noktasının bilinen x-koordinatını ve 6-Eksenli Kolun x-ekseni boyunca hareket etmesi için ölçülen mesafeyi kullanarak C noktasının x-koordinatını bulabiliriz.
Bu formülde 'delta' değerlerdeki değişimi ifade eder. Ölçtüğünüz mesafe, B ve C noktaları arasındaki x değerlerindeki değişimdir.

C noktasının x-koordinatını hesaplamak için değerlerinizi mühendislik not defterinize girin.
Bu örnekte C'nin x koordinatı 163 mm'dir.

Aynı işlemi C noktasının y koordinatını bulmak için de uygulayın. İlk olarak A noktası ile C noktası arasındaki mesafeyi ölçün ve mühendislik defterinize kaydedin. Bu, 6 Eksenli Kolunuzun y ekseni boyunca hareket etmesi gereken mesafedir.

A noktasının bilinen y-koordinatını ve 6-Eksenli Kolun y-ekseni boyunca hareket etmesi için gereken ölçülen mesafeyi kullanarak C noktasının y-koordinatını bulabiliriz.
Bu formülde 'delta' değerlerdeki değişimi ifade eder. Ölçtüğünüz mesafe, A ve C noktaları arasındaki y değerlerindeki değişimdir.

C noktasının y-koordinatını hesaplamak için değerlerinizi mühendislik not defterinize girin.
Bu örnekte C'nin y koordinatı 165 mm'dir.

Engelin Etrafından Dolaşmak İçin 6 Eksenli Kolun Kodlanması
Artık C noktasının koordinatlarını belirlediğinize göre, 6 Eksenli Kolun C noktası üzerinden A noktasından B noktasına seyahat etmesi için bir VEXcode EXP projesi oluşturmanın zamanı geldi.
VEXcode EXP'deki 1. Ders'ten projenizi açın. Bu projeyi, 6 Eksenli Kolun A noktasından C noktasına, sonra da B noktasına hareket etmesini kodlamak için Move to position bloğunu ekleyerek değiştireceksiniz.

Çalışma Alanına ek bir Taşı bloğunu konuma sürükleyin. Daha önce hesapladığınız x ve y koordinatlarını bloğun parametrelerine girin.

6 Eksenli Kolun izlemesi gereken yolu düşünün. Önce Kalem A noktasına, sonra C noktasına hareket eder. Dolayısıyla, yeni Move to position bloğunun projeye iki Move to position bloğunun arasına yerleştirilmesi gerekecektir.

Projenizi yeniden adlandırın ve ardından cihazınıza kaydedin.
Mühendislik defterinize, proje çalıştırıldığında 6 Eksenli Kolun izleyeceğini düşündüğünüz yolu kaydedin. Bunu bir çizimle veya kelimelerle yapabilirsiniz.

6-Eksen Kolunun VEXcode'a bağlı olduğundan emin olun. Projenizi çalıştırın.
6 Eksenli Kol, engelin etrafından dolaşarak engele çarpmaktan kaçınacaktır. A noktasından C noktasına doğru hareket edecek ve B noktasında sonlanacaktır.
6 Eksenli Kolun bu yolda hareket ettiği bir örneği görmek için bu videoyu izleyin.
Etkinlik
Artık bir yol noktasını bulmayı ve robotun bu noktayı kullanarak seyahat etmesini kodlamayı öğrendiğinize göre, bu beceriyi uygulayacaksınız. Bu aktivitede, 6 Eksenli Kolun engellere çarpmadan kontrollü bir şekilde bir noktadan diğerine hareket etmesini sağlayacak bir proje oluşturacaksınız.

- Kurulum: Yukarıda gösterildiği gibi Beyaz Tahtaya başlangıç ve bitiş yerlerini (A ve B) çizin. Etkinliği kurarken görselde gösterilen koordinatları kullanabilirsiniz.
- A noktası yaklaşık olarak (175, 0, 0) konumunda bulunmaktadır
- B noktası yaklaşık olarak (-25, 150, 0) konumunda bulunmaktadır
- A ve B noktaları arasına bir engel koyun. Yukarıdaki resimde engel (bir Küp) yaklaşık olarak (100, 125, 0) konumundadır.
- Etkinlik:6 Eksenli Kolun A noktasından B noktasına engele çarpmadan seyahat etmesi için bir VEXcode EXP projesi oluşturun. Bunu yapmak için bir geçiş noktası kullanın.
- Projenizi test etmek için çalıştırın. Engele çarpmadan A noktasından B noktasına başarıyla hareket edebiliyor mu? Değilse projenizi düzenleyip tekrar test edin.
- Yol noktasını bulmak için kullandığınız süreci mühendislik not defterinize kaydedin ve bu bilgiyi projenizde nasıl kullandığınıza dair ayrıntıları ekleyin.
Anlayışınızı Kontrol Edin
Bir sonraki derse geçmeden önce, aşağıdaki belgede yer alan soruları mühendislik defterinize yanıtlayarak bu dersteki kavramları anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları > (Google Dokümanı / .docx / .pdf)
Orta Ünite Yansıtma'yı tamamlamak içinSonraki >seçin.