
Na lição anterior, você aprendeu a usar a ferramenta Suporte de caneta e codificar o braço de 6 eixos para desenhar uma linha no quadro branco. Nesta Lição, você continuará a usar a Caneta enquanto aprende a controlar o caminho do Braço de 6 Eixos para contornar obstáculos. Você aprenderá:
- como identificar um waypoint para mover o Braço de 6 Eixos em torno de um obstáculo.
- como codificar o Braço de 6 Eixos para percorrer um caminho controlado usando um waypoint.
Ao final desta lição, você determinará o waypoint necessário e codificará o Braço de 6 eixos para contornar um obstáculo.
Por que controlar o caminho do braço de 6 eixos?
Imagine vários braços robóticos a trabalhar em conjunto para montar um produto numa linha de montagem. Os braços robóticos devem navegar rapidamente em torno um do outro com um alto grau de precisão. Cada braço deve percorrer seu próprio caminho complicado para que a operação seja bem-sucedida. Isso é realizado controlando o caminho de cada braço, codificando-o para se deslocar ao longo de uma série de pontos de rota. Isso evita que os braços colidam uns com os outros ou com o produto que estão montando.

Anteriormente, você codificou o Braço de 6 Eixos para viajar de um ponto a outro em linha reta. No entanto, não havia obstáculos presentes para impedir que o Braço de 6 Eixos fosse diretamente de um local para outro. Nesta Lição, haverá um obstáculo presente, então você precisará identificar um waypoint que lhe permitirá codificar o Braço de 6 Eixos para navegar ao redor do obstáculo.
Codificando o braço de 6 eixos para seguir um caminho controlado
O Braço de 6 Eixos deve se mover do ponto A para o ponto B, mas há um obstáculo diretamente entre os dois pontos.

Por causa disso, você deve encontrar um ponto de passagem para permitir que você codifique o Braço de 6 Eixos para se mover ao redor do obstáculo para que o Braço de 6 Eixos chegue ao seu destino. Um waypoint é um ponto intermediário entre dois locais em uma linha de deslocamento. Na imagem abaixo, o ponto C é um waypoint. Em vez de se deslocar diretamente do ponto A para o ponto B, o Braço de 6 Eixos pode se deslocar do ponto A para o ponto C e depois para o ponto B, a fim de evitar a colisão com o obstáculo.

Para sua informação
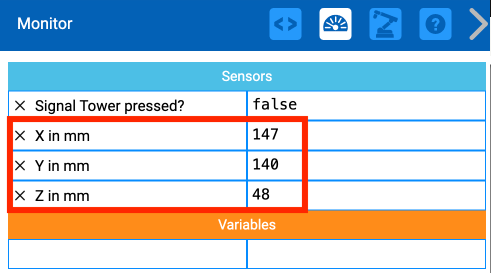
O Monitor no VEXcode EXP pode ser útil na localização de coordenadas específicas no Quadro de Comunicações. Os valores das coordenadas x, y, z serão atualizados em tempo real no Monitor à medida que o Braço de 6 Eixos é movido manualmente, permitindo que você encontre facilmente pontos específicos (como na Etapa 1, abaixo).
Encontrar um ponto de referência
Configure o seu quadro de comunicações como mostrado aqui. Certifique-se de usar um marcador de quadro branco para escrever no quadro branco.
O ponto A está localizado em aproximadamente (150, 50, 0).
O ponto B está localizado em aproximadamente (50, 150, 0).

Desenhe uma linha do ponto B até a parte inferior do quadro de comunicações, paralela ao eixo x.

Em seguida, desenhe uma linha do ponto A até a borda do quadro branco, paralela ao eixo y.

A interseção dessas duas linhas é o seu ponto de referência. Marque a interseção e rotule-a como ponto C.
Este ponto permitirá que a folga para o braço de 6 eixos se mova do ponto A para o ponto B sem atingir o obstáculo.

Em seguida, você precisará determinar as coordenadas do ponto C. Você encontrará a coordenada x primeiro.
Meça a distância entre os pontos B e C e registre-a no seu caderno de engenharia.
Nota: Estas medidas são aproximadas, as suas podem variar ligeiramente. Certifique-se de usar as suas medições nos seus cálculos.

Podemos usar a coordenada x conhecida do ponto B e a distância medida que o braço de 6 eixos precisa para se mover ao longo do eixo x, para encontrar a coordenada x do ponto C.
Nesta fórmula, o 'delta' representa uma mudança nos valores. A distância que você mediu é a mudança nos valores de x entre os pontos B e C.

Insira os seus valores para calcular a coordenada x do ponto C no seu caderno de engenharia.
Neste exemplo, a coordenada x de C é 163 mm.

Siga o mesmo processo para encontrar a coordenada y do ponto C. Primeiro, meça a distância entre o ponto A e o ponto C e registre-a em seu caderno de engenharia. Esta é a distância ao longo do eixo y que o seu braço de 6 eixos precisa mover.

Podemos usar a coordenada y conhecida do ponto A e a distância medida que o braço de 6 eixos precisa para se mover ao longo do eixo y, para encontrar a coordenada y do ponto C.
Nesta fórmula, o 'delta' representa uma mudança nos valores. A distância que você mediu é a mudança nos valores de y entre os pontos A e C.

Insira os seus valores para calcular a coordenada y do ponto C no seu caderno de engenharia.
Neste exemplo, a coordenada y de C é 165 mm.
Codificando o braço de 6 eixos para viajar ao redor do obstáculo
Agora que você determinou as coordenadas para o ponto C, é hora de criar um projeto EXP VEXCODE para o Braço de 6 Eixos se deslocar do ponto A ao ponto B, através do waypoint, ponto C.

Abra o seu projeto a partir da Lição 1 em VEXcode EXP. Você modificará este projeto adicionando um bloco Mover para a posição para codificar o Braço de 6 eixos para viajar do ponto A para o ponto C e depois para o ponto B.

Arraste um bloco adicional Mover para posição para o Espaço de Trabalho. Insira as coordenadas x e y calculadas anteriormente nos parâmetros do bloco.

Considere o caminho que o Braço de 6 Eixos deve seguir. Primeiro, a Caneta se move para o ponto A e, em seguida, para o ponto C. Portanto, o novo bloco Mover para posição precisará ser inserido no projeto entre os dois blocos Mover para posição.

Renomeie o seu projeto e salve-o no seu dispositivo.
No seu bloco de anotações de engenharia, registre o caminho que você acha que o Braço de 6 Eixos seguirá quando o projeto for executado. Você pode fazer isso com um desenho ou com palavras.
Certifique-se de que o braço de 6 eixos esteja conectado ao VEXcode. Execute o seu projeto.
O braço de 6 eixos evitará colidir com o obstáculo contornando-o. Ele se moverá do ponto A para o ponto de rota C e terminará no ponto B.
Assista a este vídeo para ver um exemplo do Braço de 6 Eixos se movendo neste caminho.
Actividade
Agora que você aprendeu a encontrar um waypoint e codificar o robô para viajar usando-o, você praticará essa habilidade. Nesta atividade, você criará um projeto para que o Braço de 6 Eixos se mova em um caminho controlado de um novo ponto para outro novo ponto, sem colidir com o obstáculo.

- Configuração: Desenhe os locais de início e término (A e B) no quadro
de comunicações, conforme mostrado acima. Pode usar as coordenadas mostradas na imagem
para o ajudar a configurar a atividade.
- O ponto A está localizado em aproximadamente (175, 0, 0)
- O ponto B está localizado aproximadamente em (-25, 150, 0)
- Defina um obstáculo entre os pontos A e B. Na imagem acima, o obstáculo (um Cubo) está localizado a aproximadamente (100, 125, 0)
- Atividade: Criar um projeto EXP VEXCODE para que o Braço de 6
Eixos se desloque do ponto A ao ponto B sem colidir com o obstáculo. Use um waypoint
para fazer isso.
- Execute o seu projeto para testá-lo. Ele se move com sucesso do ponto A para o ponto B sem colidir com o obstáculo? Caso contrário, modifique o seu projeto e teste-o novamente.
- Registe o processo que utilizou para encontrar o waypoint no seu caderno de engenharia e inclua detalhes sobre como utilizou estas informações no seu projeto.
Verifique a sua compreensão
Antes de passar para a próxima lição, certifique-se de entender os conceitos desta lição respondendo às perguntas do documento abaixo em seu caderno de engenharia.
Verifique as suas perguntas de compreensão > (Google Doc / .docx / .pdf)
Selecione Avançar > para concluir a Reflexão da Unidade Intermediária.