
Pelajaran 2: Menemukan Titik Jalan
Pada Pelajaran sebelumnya, Anda mempelajari cara menggunakan Alat Pemegang Pena dan membuat kode Lengan 6-Sumbu untuk menggambar garis pada Papan Tulis. Dalam Pelajaran ini, Anda akan terus menggunakan Pena saat Anda belajar mengendalikan lintasan Lengan 6-Sumbu untuk bergerak di sekitar rintangan. Anda akan belajar:
- cara mengidentifikasi titik arah untuk menggerakkan Lengan 6-Sumbu di sekitar rintangan.
- cara membuat kode Lengan 6-Sumbu untuk berjalan pada jalur terkendali menggunakan titik jalan.
Di akhir Pelajaran ini, Anda akan menentukan titik arah yang diperlukan dan membuat kode Lengan 6-Sumbu untuk bergerak di sekitar rintangan.
Tonton animasi di bawah untuk melihat Lengan 6-Sumbu menggunakan titik arah untuk menggambar garis. Pertama, Lengan 6-Sumbu menggambar garis diagonal yang menghubungkan dua titik arah, dan selanjutnya, menghubungkan tiga titik arah dalam sudut siku-siku untuk menghindari kubus yang ditempatkan pada Ubin.
Mengapa Mengontrol Jalur Lengan 6-Sumbu?
Bayangkan beberapa lengan robot bekerja sama untuk merakit suatu produk di jalur perakitan. Lengan robot harus bernavigasi dengan cepat satu sama lain dengan tingkat akurasi yang tinggi. Setiap lengan harus menempuh jalur rumitnya sendiri agar operasi berhasil. Hal ini dicapai dengan mengendalikan lintasan setiap lengan dengan mengodekannya untuk berjalan sepanjang serangkaian titik jalan. Ini mencegah lengan bertabrakan satu sama lain atau dengan produk yang sedang dirakit.

Sebelumnya, Anda mengkodekan Lengan 6-Sumbu untuk bergerak dari satu titik ke titik lain dalam garis lurus. Akan tetapi, tidak ada kendala yang menghalangi Lengan 6-Sumbu untuk bergerak langsung dari satu lokasi ke lokasi lain. Dalam Pelajaran ini, akan ada rintangan yang hadir, jadi Anda perlu mengidentifikasi titik arah yang akan memungkinkan Anda mengodekan Lengan 6-Sumbu untuk menavigasi di sekitar rintangan.
Mengkodekan Lengan 6-Sumbu untuk Mengikuti Jalur yang Terkendali
Lengan 6-Sumbu harus bergerak dari titik A ke titik B, tetapi ada penghalang langsung di antara kedua titik tersebut.

Oleh karena itu, Anda harus menemukan titik arah yang memungkinkan Anda mengkode Lengan 6-Sumbu untuk bergerak di sekitar rintangan agar Lengan 6-Sumbu dapat mencapai tujuannya. Titik jalan adalah titik perantara antara dua lokasi pada jalur perjalanan. Pada gambar di bawah, titik C merupakan titik jalan. Alih-alih bergerak langsung dari titik A ke titik B, Lengan 6-Sumbu dapat bergerak dari titik A, ke titik C, dan kemudian ke titik B, untuk menghindari tabrakan dengan rintangan.

Untuk Informasi Anda
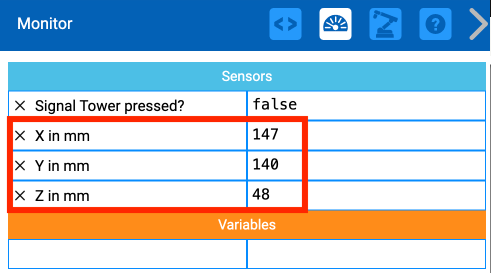
Monitor di VEXcode EXP dapat membantu dalam menemukan koordinat tertentu di Papan Tulis. Nilai koordinat x, y, z akan diperbarui secara real time di Monitor saat Lengan 6-Sumbu digerakkan secara manual, sehingga memudahkan Anda menemukan titik tertentu (seperti pada Langkah 1, di bawah).
Menemukan Titik Jalan
Siapkan Papan Tulis Anda seperti yang ditunjukkan di sini. Pastikan untuk menggunakan spidol papan tulis untuk menulis di Papan Tulis.
Titik A terletak sekitar (150, 50, 0).
Titik B terletak sekitar (50, 150, 0).
Gambarkan garis dari titik B ke bagian bawah Papan Tulis, sejajar dengan sumbu x.

Berikutnya, tarik garis dari titik A ke tepi Papan Tulis, sejajar dengan sumbu y.

Perpotongan kedua garis ini adalah titik jalan Anda. Tandai perpotongan tersebut dan beri label titik C.
Titik ini akan memberikan jarak bagi Lengan 6-Sumbu untuk bergerak dari titik A ke titik B tanpa menabrak rintangan.

Selanjutnya, Anda perlu menentukan koordinat titik C. Pertama, Anda perlu mencari koordinat x.
Ukur jarak antara titik B dan C dan catat di buku catatan teknik Anda.
Catatan:Pengukuran ini merupakan perkiraan, pengukuran Anda mungkin sedikit berbeda. Pastikan untuk menggunakan pengukuran Anda dalam perhitungan.

Kita dapat menggunakan koordinat x titik B yang diketahui, dan jarak terukur yang perlu ditempuh Lengan 6-Sumbu untuk bergerak sepanjang sumbu x, untuk menemukan koordinat x titik C.
Dalam rumus ini, 'delta' melambangkan perubahan nilai. Jarak yang Anda ukur adalah perubahan nilai x antara titik B dan C.

Masukkan nilai Anda untuk menghitung koordinat x titik C di buku catatan teknik Anda.
Dalam contoh ini, koordinat x C adalah 163mm.

Ikuti proses yang sama untuk menemukan koordinat y titik C. Pertama, ukur jarak antara titik A dan titik C dan catat di buku catatan teknik Anda. Ini adalah jarak sepanjang sumbu y yang perlu digerakkan oleh Lengan 6-Sumbu Anda.

Kita dapat menggunakan koordinat-y titik A yang diketahui, dan jarak terukur yang dibutuhkan Lengan 6-Sumbu untuk bergerak sepanjang sumbu-y, untuk menemukan koordinat-y titik C.
Dalam rumus ini, 'delta' melambangkan perubahan nilai. Jarak yang Anda ukur adalah perubahan nilai-y antara titik A dan C.

Masukkan nilai Anda untuk menghitung koordinat y titik C di buku catatan teknik Anda.
Dalam contoh ini, koordinat y C adalah 165mm.

Mengkodekan Lengan 6-Sumbu untuk Melintasi Rintangan
Sekarang setelah Anda menentukan koordinat untuk titik C, saatnya membuat proyek VEXcode EXP untuk Lengan 6-Sumbu untuk bergerak dari titik A ke titik B, melalui titik jalan, titik C.
Buka proyek Anda dari Pelajaran 1 di VEXcode EXP. Anda akan memodifikasi proyek ini dengan menambahkan blok Pindah ke posisi untuk mengkode Lengan 6-Sumbu agar bergerak dari titik A ke titik C, lalu ke titik B.

Seret blok tambahan Pindahkan ke posisi ke dalam Ruang Kerja. Masukkan koordinat x dan y yang Anda hitung sebelumnya ke dalam parameter blok.

Pertimbangkan lintasan yang harus diambil Lengan 6-Sumbu. Pertama Pena bergerak ke titik A, lalu bergerak ke titik C. Jadi, blok Pindah ke posisi yang baru perlu disisipkan ke dalam proyek di antara dua blok Pindah ke posisi.

Ganti nama proyek Anda, lalu simpan ke perangkat Anda.
Di buku catatan teknik Anda, catat lintasan yang menurut Anda akan dilalui Lengan 6-Sumbu saat proyek dijalankan. Anda dapat melakukan ini dengan gambar, atau dengan kata-kata.

Pastikan Lengan 6-Sumbu terhubung ke VEXcode. Jalankan proyek Anda.
Lengan 6-Sumbu akan menghindari tabrakan dengan rintangan dengan cara mengitarinya. Ia akan bergerak dari titik A, ke titik jalan C, dan berakhir di titik B.
Lihat video ini untuk melihat contoh Lengan 6-Sumbu yang bergerak di jalur ini.
Aktivitas
Sekarang setelah Anda belajar menemukan titik arah dan mengkodekan robot untuk bepergian menggunakannya, Anda akan melatih keterampilan ini. Dalam aktivitas ini, Anda akan membuat proyek agar Lengan 6-Sumbu bergerak dalam lintasan terkendali dari satu titik baru ke titik baru lainnya, tanpa bertabrakan dengan rintangan.

- Persiapan: Gambar lokasi awal dan akhir (A dan B) di Papan Tulis seperti yang ditunjukkan di atas. Anda dapat menggunakan koordinat yang ditunjukkan pada gambar untuk membantu Anda mengatur aktivitas.
- Titik A terletak pada kira-kira (175, 0, 0)
- Titik B terletak pada sekitar (-25, 150, 0)
- Tetapkan rintangan antara titik A dan B. Pada gambar di atas, rintangan (Kubus) terletak kira-kira di (100, 125, 0)
- Aktivitas:Buat proyek VEXcode EXP untuk Lengan 6-Sumbu untuk bergerak dari titik A ke titik B tanpa bertabrakan dengan rintangan. Gunakan titik jalan untuk melakukannya.
- Jalankan proyek Anda untuk mengujinya. Apakah ia berhasil bergerak dari titik A ke titik B tanpa bertabrakan dengan rintangan? Jika tidak, modifikasi proyek Anda dan uji lagi.
- Catat proses yang Anda gunakan untuk menemukan titik jalan di buku catatan teknik Anda, dan sertakan detail tentang bagaimana Anda menggunakan informasi ini dalam proyek Anda.
Periksa Pemahaman Anda
Sebelum melanjutkan ke Pelajaran berikutnya, pastikan Anda memahami konsep dalam Pelajaran ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda > (Google Doc / .docx / .pdf)
PilihBerikutnya >untuk melengkapi Refleksi Tengah-Unit.