
Nella lezione precedente, hai imparato come utilizzare lo strumento Portapenne e codificare il braccio a 6 assi per tracciare una linea sulla lavagna. In questa lezione, continuerai a usare la penna mentre impari a controllare il percorso del braccio a 6 assi per aggirare gli ostacoli. Imparerai:
- come identificare un waypoint per spostare il braccio a 6 assi attorno a un ostacolo.
- come codificare il braccio a 6 assi per viaggiare in un percorso controllato utilizzando un waypoint.
Alla fine di questa lezione, determinerai il waypoint necessario e codificherai il braccio a 6 assi per aggirare un ostacolo.
Perché controllare il percorso del braccio a 6 assi?
Immagina più bracci robotici che lavorano insieme per assemblare un prodotto su una catena di montaggio. I bracci robotici devono muoversi rapidamente l'uno intorno all'altro con un alto grado di precisione. Ogni braccio deve percorrere il proprio complicato percorso affinché l'operazione abbia successo. Ciò si ottiene controllando il percorso di ciascun braccio codificandolo per viaggiare lungo una serie di waypoint. Ciò impedisce ai bracci di entrare in collisione tra loro o con il prodotto che stanno assemblando.

In precedenza, è stato codificato il braccio a 6 assi per spostarsi da un punto all'altro in linea retta. Tuttavia, non erano presenti ostacoli che impedissero al braccio a 6 assi di passare direttamente da una posizione all'altra. In questa lezione, sarà presente un ostacolo, quindi dovrai identificare un waypoint che ti consentirà di codificare il braccio a 6 assi per navigare intorno all'ostacolo.
Codifica del braccio a 6 assi per seguire un percorso controllato
Il Braccio a 6 Assi deve spostarsi dal punto A al punto B, ma c'è un ostacolo direttamente tra i due punti.

Per questo motivo, è necessario trovare un waypoint che consenta di codificare il braccio a 6 assi per spostarsi intorno all'ostacolo in modo che il braccio a 6 assi raggiunga la sua destinazione. Un waypoint è un punto intermedio tra due posizioni su una linea di viaggio. Nell'immagine sottostante, il punto C è un waypoint. Invece di spostarsi direttamente dal punto A al punto B, il Braccio a 6 Assi può spostarsi dal punto A, al punto C, e quindi al punto B, al fine di evitare la collisione con l'ostacolo.

Per tua informazione
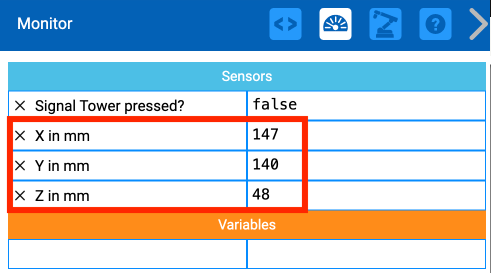
Il monitor in VEXcode EXP può essere utile per individuare coordinate specifiche sulla lavagna. I valori delle coordinate x, y, z si aggiorneranno in tempo reale sul monitor quando il braccio a 6 assi viene spostato manualmente, consentendo di trovare facilmente punti specifici (come nel passaggio 1, di seguito).
Trovare un waypoint
Configura la tua lavagna come mostrato qui. Assicurati di utilizzare un pennarello per lavagna per scrivere sulla lavagna.
Il punto A si trova a circa (150, 50, 0).
Il punto B si trova a circa (50, 150, 0).

Disegna una linea dal punto B alla parte inferiore della lavagna, parallela all'asse x.

Quindi, traccia una linea dal punto A al bordo della Lavagna, parallela all'asse y.

L'intersezione di queste due linee è il tuo waypoint. Contrassegnare l'intersezione ed etichettarla come punto C.
Questo punto consentirà al braccio a 6 assi di spostarsi dal punto A al punto B senza colpire l'ostacolo.

Successivamente dovrai determinare le coordinate del punto C. Troverai prima la coordinata x.
Misura la distanza tra i punti B e C e registrala nel tuo quaderno di ingegneria.
Nota: queste misure sono approssimative, le tue potrebbero variare leggermente. Assicurati di utilizzare le tue misurazioni nei tuoi calcoli.

Possiamo usare la coordinata x nota del punto B e la distanza misurata di cui il braccio a 6 assi ha bisogno per muoversi lungo l'asse x, per trovare la coordinata x del punto C.
In questa formula, il 'delta' rappresenta un cambiamento di valori. La distanza che hai misurato è la variazione dei valori x tra i punti B e C.

Inserisci i tuoi valori per calcolare la coordinata x del punto C nel tuo quaderno di ingegneria.
In questo esempio, la coordinata x di C è 163 mm.

Segui lo stesso processo per trovare la coordinata y del punto C. Innanzitutto, misura la distanza tra il punto A e il punto C e registrala nel tuo quaderno di ingegneria. Questa è la distanza lungo l'asse y che il braccio a 6 assi deve spostare.

Possiamo usare la coordinata y nota del punto A e la distanza misurata di cui il braccio a 6 assi ha bisogno per muoversi lungo l'asse y, per trovare la coordinata y del punto C.
In questa formula, il 'delta' rappresenta un cambiamento di valori. La distanza che hai misurato è la variazione dei valori y tra i punti A e C.

Inserisci i tuoi valori per calcolare la coordinata y del punto C nel tuo quaderno di ingegneria.
In questo esempio, la coordinata y di C è 165 mm.
Codifica del braccio a 6 assi per aggirare l'ostacolo
Ora che hai determinato le coordinate per il punto C, è il momento di creare un progetto EXP VEXCODE per il braccio a 6 assi per spostarsi dal punto A al punto B, tramite il waypoint, punto C.

Apri il tuo progetto dalla lezione 1 in VEXcode EXP. Modificherai questo progetto aggiungendo un blocco Sposta in posizione per codificare il braccio a 6 assi per spostarsi dal punto A al punto C, quindi al punto B.

Trascina un ulteriore blocco Sposta per posizionarlo nell'Area di lavoro. Inserisci le coordinate x e y calcolate in precedenza nei parametri del blocco.

Considerare il percorso che deve prendere il braccio a 6 assi. Prima la Penna si sposta al punto A, poi si sposta al punto C. Quindi, il nuovo blocco Sposta in posizione dovrà essere inserito nel progetto tra i due blocchi Sposta in posizione.

Rinominare il progetto e quindi salvarlo sul dispositivo.
Nel tuo quaderno di ingegneria, registra il percorso che pensi che il braccio a 6 assi prenderà quando il progetto verrà eseguito. Puoi farlo con un disegno o a parole.
Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Esegui il tuo progetto.
Il braccio a 6 assi eviterà la collisione con l'ostacolo aggirandolo. Si sposterà dal punto A, al waypoint C, e terminerà al punto B.
Guarda questo video per vedere un esempio del braccio a 6 assi che si muove in questo percorso.
Attività
Ora che hai imparato a trovare un waypoint e codificare il robot per viaggiare usandolo, praticherai questa abilità. In questa attività, creerai un progetto per il braccio a 6 assi per spostarsi in un percorso controllato da un nuovo punto a un altro nuovo punto, senza scontrarsi con l'ostacolo.

- Configurazione: disegnare le posizioni di inizio e fine (A e B) sulla
lavagna come mostrato sopra. Puoi utilizzare le coordinate mostrate nell'immagine per
aiutarti a impostare l'attività.
- Il punto A si trova a circa (175, 0, 0)
- Il punto B si trova a circa (-25, 150, 0)
- Impostare un ostacolo tra i punti A e B. Nell'immagine sopra l'ostacolo (un cubo) si trova a circa (100, 125, 0)
- Attività: creare un progetto EXP VEXCODE per il braccio a 6 assi
per spostarsi dal punto A al punto B senza scontrarsi con l'ostacolo. Usa un waypoint
per farlo.
- Esegui il tuo progetto per testarlo. Si sposta con successo dal punto A al punto B senza scontrarsi con l'ostacolo? In caso contrario, modifica il tuo progetto e testalo di nuovo.
- Registra il processo che hai utilizzato per trovare il waypoint nel tuo quaderno di ingegneria e includi i dettagli su come hai utilizzato queste informazioni nel tuo progetto.
Verifica la tua comprensione
Prima di passare alla lezione successiva, assicurati di comprendere i concetti di questa lezione rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Domande sulla comprensione > (Google Doc / .docx / .pdf)
Seleziona Avanti > per completare la Riflessione di metà unità.