
ในบทเรียนก่อนหน้านี้คุณได้เรียนรู้วิธีใช้เครื่องมือจับปากกาและเขียนรหัสแขน 6 แกนเพื่อวาดเส้นบนไวท์บอร์ด ในบทเรียนนี้ท่านจะยังคงใช้ปากกาต่อไปในขณะที่ท่านเรียนรู้ที่จะควบคุมเส้นทางของแขน 6 แกนเพื่อเคลื่อนที่ไปรอบๆสิ่งกีดขวาง คุณจะได้เรียนรู้:
- วิธีการระบุจุดทางเพื่อเคลื่อนแขน 6 แกนไปรอบๆสิ่งกีดขวาง
- วิธีการเขียนรหัสแขน 6 แกนเพื่อ เดินทางในเส้นทางที่ควบคุมโดยใช้จุดนำทาง
ในตอนท้ายของบทเรียนนี้ท่านจะกำหนดเส้นทางที่ต้องการและกำหนดรหัสแขน 6 แกนเพื่อเคลื่อนที่ไปรอบๆสิ่งกีดขวาง
ทำไมต้องควบคุมเส้นทางของแขน 6 แกน?
ลองนึกภาพแขนหุ่นยนต์หลายตัวทำงานร่วมกันเพื่อประกอบผลิตภัณฑ์บนสายการประกอบ แขนหุ่นยนต์จะต้องเคลื่อนที่ไปรอบๆกันอย่างรวดเร็วด้วยความแม่นยำสูง แขนแต่ละข้างต้องเดินทางไปตามเส้นทางที่ซับซ้อนของตัวเองเพื่อให้การดำเนินการประสบความสำเร็จ สิ่งนี้ทำได้โดยการควบคุมเส้นทางของแต่ละแขนโดยการเข้ารหัสเพื่อเดินทางไปตามชุดของจุดทาง สิ่งนี้จะป้องกันไม่ให้แขนชนกันหรือกับผลิตภัณฑ์ที่พวกเขากำลังประกอบ

ก่อนหน้านี้คุณตั้งรหัสแขน 6 แกนเพื่อเดินทางจากจุดหนึ่งไปยังอีกจุดหนึ่งเป็นเส้นตรง อย่างไรก็ตามไม่มีสิ่งกีดขวางอยู่เพื่อป้องกันไม่ให้แขนแกน 6 เคลื่อนที่จากตำแหน่งหนึ่งไปยังอีกตำแหน่งหนึ่งโดยตรง ในบทเรียนนี้จะมีสิ่งกีดขวางอยู่ดังนั้นคุณจะต้องระบุเส้นทางที่จะช่วยให้คุณสามารถตั้งรหัสแขน 6 แกนเพื่อนำทางไปรอบๆสิ่งกีดขวาง
การเข้ารหัสแขน 6 แกนเพื่อเดินตามเส้นทางที่ควบคุม
แขน 6 แกนต้องเคลื่อนที่จากจุด A ไปยังจุด B แต่มีอุปสรรคโดยตรงระหว่างจุดทั้งสอง

ด้วยเหตุนี้คุณต้องค้นหาเส้นทางเพื่อให้คุณสามารถกำหนดรหัสแขน 6 แกนเพื่อเคลื่อนที่ไปรอบๆสิ่งกีดขวางเพื่อให้แขน 6 แกนไปถึงปลายทาง เวย์พอยท์เป็นจุดกึ่งกลางระหว่างสองสถานที่บนเส้นทางการเดินทาง ในภาพด้านล่างจุด C เป็นจุดนำทาง แทนที่จะเดินทางโดยตรงจากจุด A ไปยังจุด B แขน 6 แกนสามารถเดินทางจากจุด A ไปยังจุด C และจากนั้นไปยังจุด B เพื่อหลีกเลี่ยงการชนกับสิ่งกีดขวาง

สำหรับข้อมูลของคุณ
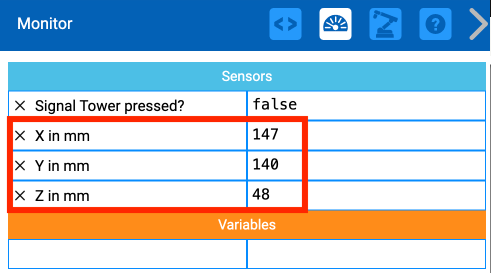
การตรวจสอบใน VEXcode EXP จะมีประโยชน์ในการระบุพิกัดเฉพาะบนไวท์บอร์ด ค่าพิกัด x, y, z จะอัปเดตแบบเรียลไทม์บนจอภาพเนื่องจากแกนแขน 6 แกนถูกเคลื่อนย้ายด้วยตนเองช่วยให้คุณค้นหาจุดเฉพาะได้อย่างง่ายดาย (ดังในขั้นตอนที่ 1 ด้านล่าง)
การค้นหาเวย์พอยท์
ตั้งค่าไวท์บอร์ดของคุณตามที่แสดงที่นี่ ตรวจสอบให้แน่ใจว่าได้ใช้เครื่องหมายไวท์บอร์ดเพื่อเขียนบนไวท์บอร์ด
จุด A อยู่ที่ประมาณ (150, 50, 0)
จุด B อยู่ที่ประมาณ (50, 150, 0)

ลากเส้นจากจุด B ไปยังด้านล่างของกระดานไวท์บอร์ดขนานไปกับแกน x

จากนั้นลากเส้นจากจุด A ไปยังขอบกระดานไวท์บอร์ดขนานไปกับแกน y

จุดตัดของสองเส้นนี้คือเส้นทางของคุณ ทำเครื่องหมายที่จุดตัดและติดป้ายกำกับไว้ที่จุด C
จุดนี้จะยอมให้มีการเว้นระยะห่างสำหรับแขน 6 แกนเพื่อเคลื่อนที่จากจุด A ไปยังจุด B โดยไม่ชนกับสิ่งกีดขวาง

ต่อไปคุณจะต้องกำหนดพิกัดของจุด C คุณจะพบพิกัด x ก่อน
วัดระยะห่างระหว่างจุด B และ C และบันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
หมายเหตุ: การวัด เหล่านี้เป็นค่าประมาณของคุณอาจแตกต่างกันเล็กน้อย ตรวจสอบให้แน่ใจว่าได้ใช้ การวัด ของคุณในการคำนวณของคุณ

เราสามารถใช้พิกัด x ที่รู้จักกันของจุด B และระยะทางที่วัดได้แขน 6 แกนต้องเคลื่อนที่ไปตามแกน x เพื่อหาพิกัด x ของจุด C
ในสูตรนี้ 'เดลต้า' แสดงถึงการเปลี่ยนแปลงค่า ระยะทางที่คุณวัดได้คือการเปลี่ยนแปลงค่า x ระหว่างจุด B และ C

ป้อนค่าของคุณเพื่อคำนวณพิกัด x ของจุด C ในสมุดบันทึกวิศวกรรมของคุณ
ในตัวอย่างนี้พิกัด x ของ C คือ 163 มม.

ทำตามขั้นตอนเดียวกันเพื่อหาพิกัด y ของจุด C ก่อนอื่นให้วัดระยะห่างระหว่างจุด A และจุด C และบันทึกลงในสมุดบันทึกวิศวกรรมของคุณ นี่คือระยะทางตามแกน y ที่แขน 6 แกนของคุณต้องเคลื่อนที่

เราสามารถใช้พิกัด y ที่รู้จักกันของจุด A และระยะทางที่วัดได้แขน 6 แกนต้องเคลื่อนที่ไปตามแกน y เพื่อหาพิกัด y ของจุด C
ในสูตรนี้ 'เดลต้า' แสดงถึงการเปลี่ยนแปลงค่า ระยะทางที่คุณวัดได้คือการเปลี่ยนแปลงค่า y ระหว่างจุด A และ C

ป้อนค่าของคุณเพื่อคำนวณพิกัด y ของจุด C ในสมุดบันทึกวิศวกรรมของคุณ
ในตัวอย่างนี้พิกัด y ของ C คือ 165 มม.
การเข้ารหัสแขน 6 แกนเพื่อเดินทางไปรอบๆสิ่งกีดขวาง
ตอนนี้คุณได้กำหนดพิกัดสำหรับจุด C แล้วถึงเวลาสร้างโครงการ VEXcode EXP สำหรับแขน 6 แกนเพื่อเดินทางจากจุด A ไปยังจุด B ผ่านจุดทางจุด C

เปิดโปรเจกต์ของคุณจากบทเรียนที่ 1 ใน VEXcode EXP. คุณจะปรับเปลี่ยนโปรเจกต์นี้โดยเพิ่ม Move to position block เพื่อกำหนดรหัสแขน 6 แกนเพื่อเดินทางจากจุด A ไปยังจุด C จากนั้นไปยังจุด B

ลาก ย้ายเพิ่มเติมไปยัง บล็อคตำแหน่งในพื้นที่ทำงาน ป้อนพิกัด x และ y ที่คุณคำนวณไว้ก่อนหน้านี้ลงในพารามิเตอร์ของบล็อก

พิจารณาเส้นทางที่แขน 6 แกนต้องเดิน ก่อนอื่นปากกาจะย้ายไปยังจุด A และจากนั้นจะย้ายไปยังจุด C ดังนั้น บล็อกการ ย้ายไปยังตำแหน่งใหม่จะต้องถูกแทรกลงในโครงการระหว่าง บล็อกการ ย้ายไปยังตำแหน่งทั้งสอง

เปลี่ยนชื่อโปรเจกต์แล้วบันทึกลงในอุปกรณ์
ในสมุดบันทึกวิศวกรรมของคุณให้บันทึกเส้นทางที่คุณคิดว่าแขน 6 แกนจะใช้เมื่อโครงการทำงาน คุณสามารถทำสิ่งนี้ได้ด้วยการวาดหรือเป็นคำพูด
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว เรียกใช้โปรเจกต์ของคุณ
แขน 6 แกนจะหลีกเลี่ยงการชนกับสิ่งกีดขวางโดยอ้อมไปรอบๆ มันจะย้ายจากจุด A ไปยังจุด C และไปสิ้นสุดที่จุด B
ดูวิดีโอนี้เพื่อดูตัวอย่างของแขน 6 แกนที่เคลื่อนที่ในเส้นทางนี้
กิจกรรม
ตอนนี้คุณได้เรียนรู้ที่จะหาเส้นทางและรหัสหุ่นยนต์เพื่อเดินทางโดยใช้มันแล้วคุณจะได้ฝึกฝนทักษะนี้ ในกิจกรรมนี้คุณจะสร้างโครงการสำหรับแขน 6 แกนเพื่อย้ายในเส้นทางที่ควบคุมจากจุดใหม่หนึ่งไปยังอีกจุดใหม่โดยไม่ชนกับสิ่งกีดขวาง

- การตั้งค่า: วาดตำแหน่งเริ่มต้นและสิ้นสุด (A และ B)
บนไวท์บอร์ดตามที่แสดงด้านบน คุณสามารถใช้พิกัดที่แสดงในภาพเพื่อช่วยในการตั้งค่ากิจกรรมได้
- จุด A อยู่ที่ประมาณ (175, 0, 0)
- จุด B อยู่ที่ประมาณ (-25, 150, 0)
- ตั้งสิ่งกีดขวาง ระหว่างจุด A และ B ในภาพด้านบนสิ่งกีดขวาง (ลูกบาศก์) อยู่ที่ประมาณ (100, 125, 0)
- กิจกรรม: สร้างโครงการ VEXcode EXP สำหรับแขน 6
แกนเพื่อเดินทางจากจุด A ไปยังจุด B โดยไม่ชนกับสิ่งกีดขวาง ใช้จุดนำทางเพื่อทำเช่นนั้น
- เรียกใช้โปรเจกต์ของคุณเพื่อทดสอบ มันประสบความสำเร็จในการย้ายจากจุด A ไปยังจุด B โดยไม่ชนกับสิ่งกีดขวางหรือไม่? หากไม่ใช่ให้แก้ไขโปรเจกต์ของคุณและทดสอบอีกครั้ง
- บันทึกกระบวนการที่คุณใช้ในการค้นหาเส้นทาง ในสมุดบันทึกวิศวกรรมของคุณและรวมถึงรายละเอียดเกี่ยวกับวิธีที่คุณใช้ข้อมูลนี้ในโครงการของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะย้ายไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัดไป > เพื่อทำการสะท้อนหน่วยกลางให้เสร็จสมบูรณ์