
In der vorherigen Lektion haben Sie gelernt, wie Sie das Stifthalterwerkzeug verwenden und den 6-Achsen-Arm codieren, um eine Linie auf dem Whiteboard zu zeichnen. In dieser Lektion werden Sie weiterhin den Stift verwenden, während Sie lernen, den Weg des 6-Achsen-Arms zu kontrollieren, um sich um Hindernisse zu bewegen. Sie lernen:
- wie man einen Wegpunkt identifiziert, um den 6-Achsen-Arm um ein Hindernis zu bewegen.
- wie man den 6-Achsen-Arm codiert, um mit einem Wegpunkt in einer kontrollierten Bahn zu fahren.
Am Ende dieser Lektion bestimmen Sie den benötigten Wegpunkt und codieren den 6-Achsen-Arm, um sich um ein Hindernis zu bewegen.
Warum den Weg des 6-Achsen-Arms kontrollieren?
Stellen Sie sich mehrere Roboterarme vor, die zusammenarbeiten, um ein Produkt auf einer Montagelinie zu montieren. Die Roboterarme müssen mit hoher Genauigkeit schnell umeinander navigieren. Jeder Arm muss seinen eigenen komplizierten Weg zurücklegen, damit die Operation erfolgreich ist. Dies wird erreicht, indem der Weg jedes Arms gesteuert wird, indem er so codiert wird, dass er sich entlang einer Reihe von Wegpunkten bewegt. Dies verhindert, dass die Arme miteinander oder mit dem Produkt, das sie zusammenbauen, kollidieren.

Zuvor haben Sie den 6-Achsen-Arm so codiert, dass er geradlinig von einem Punkt zum anderen fährt. Es gab jedoch keine Hindernisse, die den 6-Achsen-Arm daran hindern konnten, direkt von einem Ort zum anderen zu gelangen. In dieser Lektion wird ein Hindernis vorhanden sein, daher müssen Sie einen Wegpunkt identifizieren, mit dem Sie den 6-Achsen-Arm codieren können, um um das Hindernis herum zu navigieren.
Codierung des 6-Achsen-Arms, um einem kontrollierten Pfad zu folgen
Der 6-Achsen-Arm muss sich von Punkt A zu Punkt B bewegen, aber es gibt ein Hindernis direkt zwischen den beiden Punkten.

Aus diesem Grund müssen Sie einen Wegpunkt finden, an dem Sie den 6-Achsen-Arm so codieren können, dass er sich um das Hindernis bewegt, damit der 6-Achsen-Arm sein Ziel erreicht. Ein Wegpunkt ist ein Zwischenpunkt zwischen zwei Orten auf einer Fahrtlinie. In der folgenden Abbildung ist Punkt C ein Wegpunkt. Anstatt direkt von Punkt A zu Punkt B zu fahren, kann der 6-Achsen-Arm von Punkt A zu Punkt C und dann zu Punkt B fahren, um eine Kollision mit dem Hindernis zu vermeiden.

Zur Kenntnisnahme
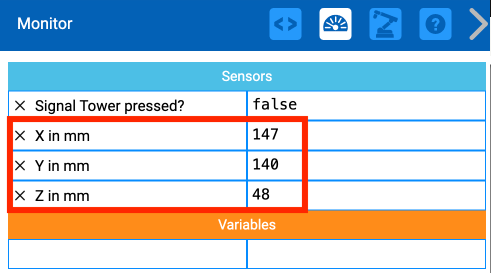
Der Monitor in VEXcode EXP kann hilfreich sein, um bestimmte Koordinaten auf dem Whiteboard zu lokalisieren. Die x-, y-, z-Koordinatenwerte werden in Echtzeit auf dem Monitor aktualisiert, wenn der 6-Achsen-Arm manuell bewegt wird, sodass Sie bestimmte Punkte leicht finden können (wie in Schritt 1 unten).
Einen Wegpunkt finden
Richten Sie Ihr Whiteboard wie hier gezeigt ein. Achten Sie darauf, einen Whiteboard-Marker zu verwenden, um auf das Whiteboard zu schreiben.
Punkt A befindet sich bei etwa (150, 50, 0).
Punkt B befindet sich bei etwa (50, 150, 0).

Zeichnen Sie eine Linie von Punkt B zur Unterseite des Whiteboards, parallel zur x-Achse.

Zeichnen Sie als nächstes eine Linie von Punkt A bis zum Rand des Whiteboards parallel zur y-Achse.

Der Schnittpunkt dieser beiden Linien ist Ihr Wegpunkt. Markieren Sie den Schnittpunkt und beschriften Sie ihn mit Punkt C.
Dieser Punkt ermöglicht es dem 6-Achsen-Arm, sich von Punkt A zu Punkt B zu bewegen, ohne auf das Hindernis zu treffen.

Als nächstes müssen Sie die Koordinaten von Punkt C bestimmen. Sie finden zuerst die x-Koordinate.
Messen Sie den Abstand zwischen den Punkten B und C und notieren Sie ihn in Ihrem technischen Notizbuch.
Hinweis: Diese Messungen sind ungefähre Angaben. Ihre können geringfügig variieren. Achten Sie darauf, Ihre Messungen in Ihren Berechnungen zu verwenden.

Wir können die bekannte x-Koordinate von Punkt B und die gemessene Entfernung verwenden, die der 6-Achsen-Arm benötigt, um sich entlang der x-Achse zu bewegen, um die x-Koordinate von Punkt C zu finden.
In dieser Formel stellt das 'Delta' eine Änderung der Werte dar. Die von Ihnen gemessene Entfernung ist die Änderung der x-Werte zwischen den Punkten B und C.

Geben Sie Ihre Werte ein, um die x-Koordinate von Punkt C in Ihrem technischen Notizbuch zu berechnen.
In diesem Beispiel beträgt die x-Koordinate von C 163 mm.

Befolgen Sie den gleichen Prozess, um die y-Koordinate von Punkt C zu finden. Messen Sie zuerst den Abstand zwischen Punkt A und Punkt C und notieren Sie ihn in Ihrem technischen Notizbuch. Dies ist der Abstand entlang der y-Achse, den Ihr 6-Achsen-Arm zum Bewegen benötigt.

Wir können die bekannte y-Koordinate von Punkt A und die gemessene Entfernung verwenden, die der 6-Achsen-Arm benötigt, um sich entlang der y-Achse zu bewegen, um die y-Koordinate von Punkt C zu finden.
In dieser Formel stellt das 'Delta' eine Änderung der Werte dar. Der von Ihnen gemessene Abstand ist die Änderung der y-Werte zwischen den Punkten A und C.

Geben Sie Ihre Werte ein, um die y-Koordinate von Punkt C in Ihrem technischen Notizbuch zu berechnen.
In diesem Beispiel beträgt die y-Koordinate von C 165 mm.
Codierung des 6-Achsen-Arms, um das Hindernis zu umgehen
Nachdem Sie nun die Koordinaten für Punkt C bestimmt haben, ist es an der Zeit, ein VEXcode EXP-PROJEKT für den 6-Achsen-Arm zu erstellen, um von Punkt A nach Punkt B über den Wegpunkt Punkt C zu fahren.

Öffnen Sie Ihr Projekt aus Lektion 1 in VEXcode EXP. Sie werden dieses Projekt ändern, indem Sie einen Verschiebe-zu-Position-Block hinzufügen, um den 6-Achsen-Arm so zu codieren, dass er von Punkt A zu Punkt C und dann zu Punkt B fährt.

Ziehen Sie einen zusätzlichen Move, um den Block in den Arbeitsbereich zu positionieren. Geben Sie die zuvor berechneten x- und y-Koordinaten in die Parameter des Blocks ein.

Betrachten Sie den Weg, den der 6-Achsen-Arm nehmen muss. Zuerst bewegt sich der Stift zu Punkt A und dann zu Punkt C. Daher muss der neue Block Verschieben zu Position in das Projekt zwischen den beiden Blöcken Verschieben zu Position eingefügt werden.

Benennen Sie Ihr Projekt um und speichern Sie es dann auf Ihrem Gerät.
Notieren Sie in Ihrem technischen Notizbuch den Weg, den der 6-Achsen-Arm Ihrer Meinung nach nehmen wird, wenn das Projekt ausgeführt wird. Sie können dies mit einer Zeichnung oder in Worten tun.
Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist. Führen Sie Ihr Projekt aus.
Der 6-Achsen-Arm verhindert eine Kollision mit dem Hindernis, indem er um das Hindernis herumgeht. Sie bewegt sich von Punkt A zum Wegpunkt C und endet bei Punkt B.
Sehen Sie sich dieses Video an, um ein Beispiel dafür zu sehen, wie sich der 6-Achsen-Arm in diesem Pfad bewegt.
Aktivität
Nachdem Sie nun gelernt haben, einen Wegpunkt zu finden und den Roboter so zu programmieren, dass er damit fährt, werden Sie diese Fähigkeit üben. In dieser Aktivität erstellen Sie ein Projekt für den 6-Achsen-Arm, um sich auf einem kontrollierten Weg von einem neuen Punkt zu einem anderen neuen Punkt zu bewegen, ohne mit dem Hindernis zu kollidieren.

- Setup: Zeichnen Sie die Start- und Endpositionen (A und B) auf dem
Whiteboard wie oben gezeigt. Sie können die im Bild gezeigten Koordinaten verwenden, um
die Aktivität einzurichten.
- Punkt A befindet sich bei ca. (175, 0, 0)
- Punkt B befindet sich bei etwa (-25, 150, 0)
- Setzen Sie ein Hindernis zwischen den Punkten A und B. Im Bild über dem Hindernis (ein Würfel) befindet sich ungefähr (100, 125, 0)
- Aktivität: Erstellen Sie ein VEXcode EXP-PROJEKT für den
6-Achsen-Arm, um von Punkt A nach Punkt B zu fahren, ohne mit dem Hindernis zu
kollidieren. Verwenden Sie dazu einen Wegpunkt.
- Führen Sie Ihr Projekt aus, um es zu testen. Bewegt es sich erfolgreich von Punkt A zu Punkt B, ohne mit dem Hindernis zu kollidieren? Wenn nicht, ändern Sie Ihr Projekt und testen Sie es erneut.
- Notieren Sie den Prozess, mit dem Sie den Wegpunkt in Ihrem technischen Notizbuch gefunden haben, und fügen Sie Details darüber hinzu, wie Sie diese Informationen in Ihrem Projekt verwendet haben.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion fortfahren, stellen Sie sicher, dass Sie die Konzepte in dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um die Reflexion in der Mitte der Einheit abzuschließen.