
En la lección anterior, aprendiste a usar la herramienta Portaplumas y a codificar el brazo de 6 ejes para dibujar una línea en la pizarra. En esta lección, continuarás usando la pluma a medida que aprendas a controlar la trayectoria del brazo de 6 ejes para moverte por los obstáculos. Aprenderás:
- cómo identificar un punto de referencia para mover el brazo de 6 ejes alrededor de un obstáculo.
- cómo codificar el brazo de 6 ejes para viajar en una ruta controlada utilizando un punto de referencia.
Al final de esta lección, determinará el punto de referencia necesario y codificará el brazo de 6 ejes para moverse alrededor de un obstáculo.
¿Por qué controlar la trayectoria del brazo de 6 ejes?
Imagine varios brazos robóticos trabajando juntos para ensamblar un producto en una línea de montaje. Los brazos robóticos deben navegar rápidamente entre sí con un alto grado de precisión. Cada brazo debe recorrer su propio camino complicado para que la operación tenga éxito. Esto se logra controlando la trayectoria de cada brazo codificándolo para que viaje a lo largo de una serie de puntos de referencia. Esto evita que los brazos colisionen entre sí o con el producto que están ensamblando.

Anteriormente, codificabas el brazo de 6 ejes para que viajara de un punto a otro en línea recta. Sin embargo, no había obstáculos presentes para evitar que el brazo de 6 ejes fuera directamente de un lugar a otro. En esta lección, habrá un obstáculo presente, por lo que deberá identificar un punto de referencia que le permita codificar el brazo de 6 ejes para navegar alrededor del obstáculo.
Codificación del brazo de 6 ejes para seguir un camino controlado
El brazo de 6 ejes debe moverse del punto A al punto B, pero hay un obstáculo directamente entre los dos puntos.

Debido a esto, debes encontrar un punto de referencia que te permita codificar el brazo de 6 ejes para que se mueva alrededor del obstáculo para que el brazo de 6 ejes llegue a su destino. Un waypoint es un punto intermedio entre dos ubicaciones en una línea de viaje. En la imagen a continuación, el punto C es un punto de referencia. En lugar de viajar directamente del punto A al punto B, el brazo de 6 ejes puede viajar del punto A al punto C y luego al punto B, para evitar chocar con el obstáculo.

Para su información
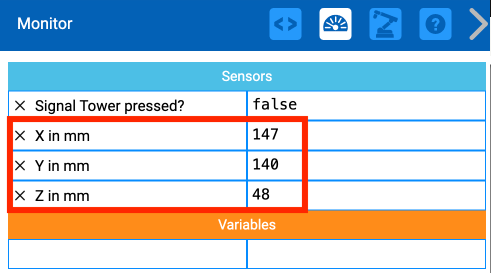
El Monitor en VEXcode EXP puede ser útil para localizar coordenadas específicas en la pizarra. Los valores de las coordenadas x, y, z se actualizarán en tiempo real en el monitor a medida que el brazo de 6 ejes se mueva manualmente, lo que le permitirá encontrar fácilmente puntos específicos (como en el paso 1, a continuación).
Encontrar un waypoint
Configure su pizarra como se muestra aquí. Asegúrese de usar un marcador de pizarra para escribir en la pizarra.
El punto A se encuentra aproximadamente en (150, 50, 0).
El punto B se encuentra aproximadamente en (50, 150, 0).

Dibuja una línea desde el punto B hasta la parte inferior de la pizarra blanca, paralela al eje x.

A continuación, dibuje una línea desde el punto A hasta el borde de la pizarra blanca, paralela al eje y.

La intersección de estas dos líneas es tu punto de referencia. Marque la intersección y etiquétela como punto C.
Este punto permitirá que el brazo de 6 ejes se mueva del punto A al punto B sin golpear el obstáculo.

A continuación, deberás determinar las coordenadas del punto C. Encontrarás primero la coordenada x.
Mida la distancia entre los puntos B y C y regístrela en su cuaderno de ingeniería.
Nota: Estas medidas son aproximadas, la tuya puede variar ligeramente. Asegúrese de utilizar sus medidas en sus cálculos.

Podemos usar la coordenada x conocida del punto B, y la distancia medida que el brazo de 6 ejes necesita para moverse a lo largo del eje x, para encontrar la coordenada x del punto C.
En esta fórmula, el 'delta' representa un cambio en los valores. La distancia que midió es el cambio en los valores de x entre los puntos B y C.

Introduzca sus valores para calcular la coordenada x del punto C en su cuaderno de ingeniería.
En este ejemplo, la coordenada x de C es 163 mm.

Siga el mismo proceso para encontrar la coordenada y del punto C. Primero, mida la distancia entre el punto A y el punto C y regístrela en su cuaderno de ingeniería. Esta es la distancia a lo largo del eje y que su brazo de 6 ejes necesita mover.

Podemos usar la coordenada y conocida del punto A, y la distancia medida que el brazo de 6 ejes necesita para moverse a lo largo del eje y, para encontrar la coordenada y del punto C.
En esta fórmula, el 'delta' representa un cambio en los valores. La distancia que midió es el cambio en los valores de y entre los puntos A y C.

Introduzca sus valores para calcular la coordenada y del punto C en su cuaderno de ingeniería.
En este ejemplo, la coordenada y de C es 165 mm.
Codificación del brazo de 6 ejes para desplazarse alrededor del obstáculo
Ahora que ha determinado las coordenadas para el punto C, es hora de crear un proyecto VEXcode EXP para que el brazo de 6 ejes viaje del punto A al punto B, a través del punto de referencia, el punto C.

Abra su proyecto de la Lección 1 en VEXcode EXP. Modificará este proyecto agregando un bloque Mover a posición para codificar el brazo de 6 ejes para viajar del punto A al punto C, luego al punto B.

Arrastre un bloque adicional Move to position al área de trabajo. Introduzca las coordenadas x e y que calculó anteriormente en los parámetros del bloque.

Considere el camino que debe tomar el brazo de 6 ejes. Primero, el bolígrafo se mueve al punto A y luego se mueve al punto C. Por lo tanto, el nuevo bloque Mover a posición deberá insertarse en el proyecto entre los dos bloques Mover a posición.

Cambia el nombre de tu proyecto y guárdalo en tu dispositivo.
En su cuaderno de ingeniería, registre la ruta que cree que tomará el brazo de 6 ejes cuando se ejecute el proyecto. Puedes hacerlo con un dibujo o con palabras.
Asegúrese de que el brazo de 6 ejes esté conectado a VEXcode. Ejecuta tu proyecto.
El brazo de 6 ejes evitará chocar con el obstáculo rodeándolo. Se moverá desde el punto A, hasta el punto de referencia C, y terminará en el punto B.
Vea este vídeo para ver un ejemplo del brazo de 6 ejes que se mueve en esta ruta.
Actividad
Ahora que has aprendido a encontrar un punto de referencia y codificar el robot para viajar con él, practicarás esta habilidad. En esta actividad, crearás un proyecto para que el brazo de 6 ejes se mueva en una trayectoria controlada de un nuevo punto a otro nuevo punto, sin chocar con el obstáculo.

- Configuración: dibuje las ubicaciones de inicio y final (A y B) en la
pizarra como se muestra arriba. Puede utilizar las coordenadas que se muestran en la
imagen para ayudarle a configurar la actividad.
- El punto A se encuentra aproximadamente en (175, 0, 0)
- El punto B se encuentra aproximadamente en (-25, 150, 0)
- Establezca un obstáculo entre los puntos A y B. En la imagen de arriba, el obstáculo (un cubo) se encuentra aproximadamente en (100, 125, 0)
- Actividad: Crear un proyecto VEXCODE EXP para que el brazo de 6
ejes viaje del punto A al punto B sin chocar con el obstáculo. Utiliza un punto de
referencia para hacerlo.
- Ejecuta tu proyecto para probarlo. ¿Se mueve con éxito del punto A al punto B sin chocar con el obstáculo? Si no es así, modifique su proyecto y pruébelo de nuevo.
- Registre el proceso que utilizó para encontrar el punto de referencia en su cuaderno de ingeniería e incluya detalles sobre cómo utilizó esta información en su proyecto.
Compruebe su comprensión
Antes de pasar a la siguiente lección, asegúrate de comprender los conceptos de esta lección respondiendo las preguntas del siguiente documento en tu cuaderno de ingeniería.
Verifique sus preguntas de comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para completar la Reflexión de la Unidad Media.