
تنافس
في هذا الدرس، تعلمت كيفية استخدام برامج التحكم الذاتي والسائق لدفع الروبوت الخاص بك لجمع وتسجيل الحلقات وتعلمت كيفية ولماذا استخدام فتحات البرنامج المتعددة في VEXcode EXP. لقد تدربت على تحسين استراتيجيتك لكل من التحكم في السائق والحركات الذاتية، والآن أنت مستعد لتطبيق ما تعلمته على تحدي القرار المنقسم!
هدف هذا التحدي هو تحقيق أعلى نتيجة من خلال الاستيلاء على أربع حلقات على عمود متوسط وتحريكها وتسجيلها في جولتين مدة كل منهما 30 ثانية. سيتم تشغيل أحد التشغيلات بواسطة السائق، والآخر بواسطة التحكم الذاتي. يوضح الرسم المتحرك أدناه كيفية إعداد الملعب، وكيفية لعب الشوطين وتسجيلهما. الروبوت الذي يحصل على أكبر عدد من النقاط يفوز.
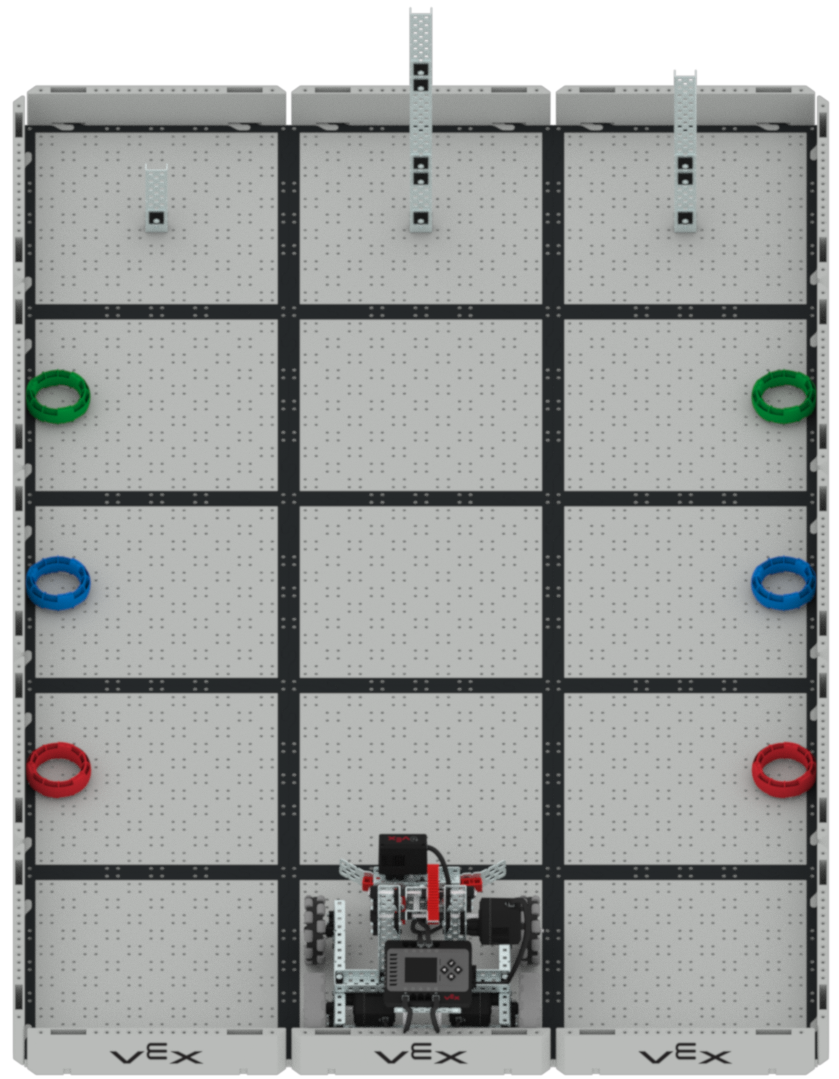
في الفيديو أدناه، يقف Clawbot على الجانب الأيسر من الملعب، مواجهًا لعمود متوسط الحجم مثبت في وسط Field Tile على بعد أربعة صفوف من الروبوت بالقرب من الحائط الأيمن. هناك أربع حلقات في الملعب. الأول يقع مقابل جدار الملعب العلوي بين البلاط الثاني والثالث، والثاني يقع مقابل جدار الملعب العلوي بين البلاط الثالث والرابع. تقع الحلقات الثالثة والرابعة مباشرة مقابل الحلقات الأولى والثانية، مقابل جدار الحقل السفلي. توجد ساعة توقيت فوق الحقل مضبوطة على 30 ثانية، بالإضافة إلى أيقونة الدماغ التي تشير إلى أن هذا هو الجزء المستقل من التحدي. يبدأ الفيديو بالعد التنازلي من الرقم ثلاثة. يتحرك Clawbot لالتقاط الحلقات ووضعها على العمود، ويسجل ثلاثة من الأربعة قبل انتهاء الوقت، ليحصل على نتيجة مستقلة قدرها 9. يبدأ تشغيل التحكم بالسائق بالعد التنازلي: 3، 2، 1. يتجه Clawbot لالتقاط الحلقات ووضعها على العمود، ويسجل 3 نقاط قبل انتهاء الوقت. النتيجة النهائية للقيادة الذاتية هي 9، والنتيجة النهائية للتحكم بالسائق هي 9 بإجمالي 18 نقطة
اتبع الخطوات الواردة في هذه الوثيقة لاستكمال تحدي القرار المنقسم. Google / .docx / .pdf
بمجرد إكمال تحدي القرار المنقسم، قم بالتواصل مع معلمك. تأكد من توثيق نتائج التحدي في دفتر الهندسة الخاص بك.
انعكاس الختام
الآن بعد أن قمت بإنشاء استراتيجية وتنافست في تحدي القرار المنقسم، حان الوقت للتفكير فيما تعلمته وفعلته في هذا الدرس. ابدأ صفحة جديدة في دفتر الهندسة الخاص بك لبدء تفكيرك.
قم بتقييم نفسك كمبتدئ أو متدرب أو خبير في كل من المفاهيم التالية في دفتر الهندسة الخاص بك. قم بتقديم شرح موجز لسبب منح نفسك هذا التصنيف لكل مفهوم:
- تطبيق معرفتي بالتحكم المخصص في برنامج التشغيل على EXP Brain وفي VEXcode EXP لبرمجة الروبوت الخاص بي للحصول على أعلى درجة ممكنة في Split Decision Challenge
- تخطيط وتنفيذ مشروع يجعل الروبوت الخاص بي يكمل تحدي القرار المنقسم بشكل مستقل
- استخدام فتحات مشروع متعددة في EXP Brain من أجل الحصول على أعلى درجة ممكنة في Split Decision Challenge
- التعاون مع أعضاء فريقي لإنشاء استراتيجية شاملة لتحدي القرار المنقسم
استخدم هذا الجدول لمساعدتك في تحديد الفئة التي تنتمي إليها.
| خبير | أشعر أنني فهمت المفهوم بشكل كامل وأستطيع أن أعلمه لشخص آخر. |
| متدرب | أشعر أنني فهمت المفهوم بما يكفي للمنافسة في التحدي. |
| مبتدئ | أشعر أنني لم أفهم المفهوم ولا أعرف كيفية إكمال التحدي. |
ما هو التالي؟
في هذا الدرس، تعلمت كيفية تخصيص التحكم في السائق، وكيفية التخطيط لروبوتك وترميزه للتحرك بشكل مستقل. لقد تدربت على تطوير استراتيجية لإكمال الأنشطة باستخدام التحكم في السائق وبشكل مستقل. لقد تعلمت أيضًا كيفية استخدام فتحات البرنامج المتعددة في VEXcode EXP. ولماذا. الآن حان الوقت للتنافس في مسابقة Ring Leader!
في الدرس القادم سوف تتعلم:
- قم بمراجعة قواعد المسابقة
- تطوير استراتيجية اللعبة
- تنافس في مسابقة زعيم الحلبة!
حدد < العودة إلى الدروس للعودة إلى نظرة عامة على الدرس.
اختر الدرس التالي > للمتابعة إلى الدرس 5 ومعرفة كيفية المشاركة في مسابقة Ring Leader!