
Rivaliser
Dans cette leçon, vous avez appris à utiliser des programmes autonomes et de contrôle du conducteur pour conduire votre robot afin de collecter et de marquer des anneaux et vous avez appris comment et pourquoi utiliser plusieurs emplacements de programme dans VEXcode EXP. Vous avez pratiqué l'optimisation de votre stratégie pour le contrôle du conducteur et les mouvements autonomes, et vous êtes maintenant prêt à appliquer ce que vous avez appris au Split Decision Challenge !
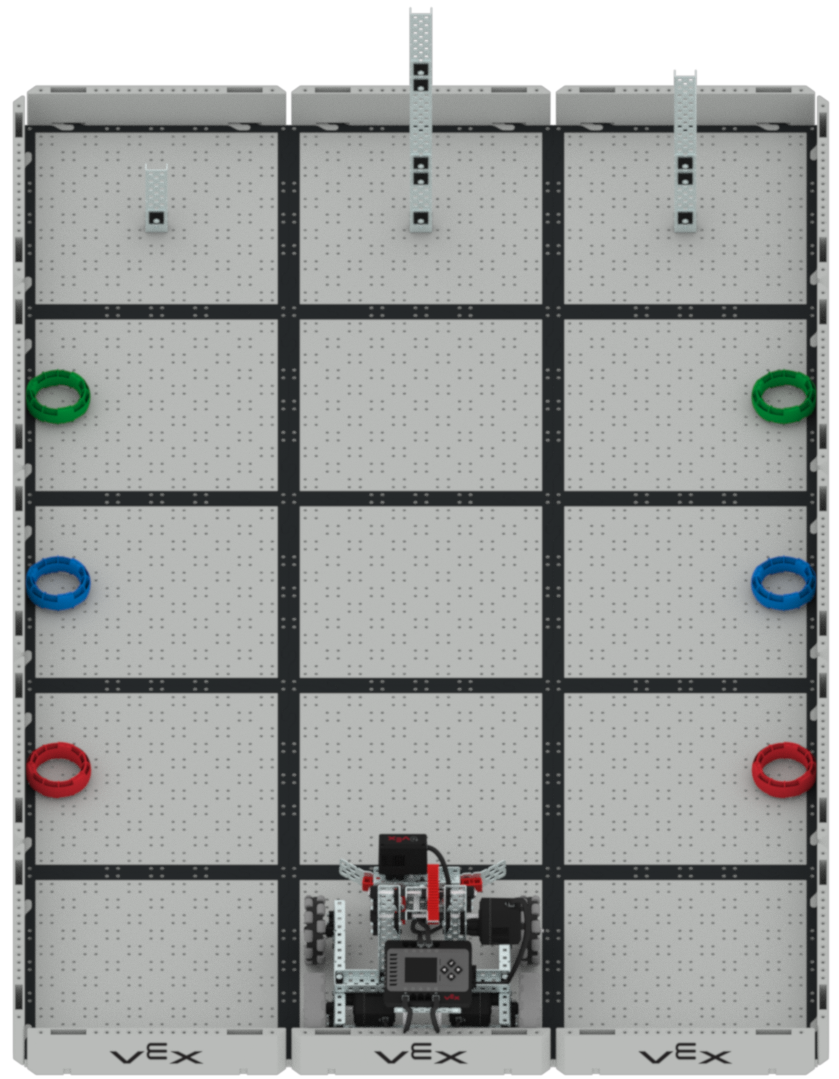
Le but de ce défi est d'atteindre le score le plus élevé en saisissant, en déplaçant et en marquant quatre anneaux sur un poteau moyen en deux courses de 30 secondes. Une course sera contrôlée par le conducteur et l'autre sera autonome. L'animation ci-dessous montre comment le terrain doit être configuré et comment les deux courses sont jouées et notées. Le robot qui obtient le plus de points gagne.
Dans la vidéo ci-dessous, le Clawbot se trouve sur le côté gauche du terrain, face à un poteau de taille moyenne fixé au centre de la tuile de terrain à quatre rangées du robot près du mur de droite. Il y a quatre anneaux sur le terrain. Le premier est contre le mur du champ supérieur entre les deuxième et troisième tuiles, et le deuxième est contre le mur du champ supérieur entre les troisième et quatrième tuiles. Les troisième et quatrième anneaux sont placés directement en face du premier et du deuxième, contre le mur inférieur du champ. Il y a un chronomètre au-dessus du terrain réglé sur 30 secondes, ainsi qu'une icône Cerveau indiquant qu'il s'agit de la partie autonome du défi. La vidéo commence par un compte à rebours à partir de trois. Le Clawbot se déplace pour ramasser les anneaux et les placer sur le poteau, et marque trois des quatre avant la fin du temps, pour un score autonome de 9. Le contrôle du conducteur commence par un compte à rebours : 3, 2, 1. Le Clawbot se dirige vers le poteau pour récupérer et placer des anneaux, marquant 3 points avant la fin du temps imparti. Le score final autonome est de 9 et le score final de contrôle du conducteur est de 9 avec un score total de 18
Suivez les étapes décrites dans ce document pour compléter le défi de décision partagée. Google / .docx / .pdf
Une fois que vous avez terminé le défi de décision partagée, contactez votre enseignant. Assurez-vous d’avoir documenté les résultats du défi dans votre carnet d’ingénierie.
Réflexion de conclusion
Maintenant que vous avez créé une stratégie et participé au Split Decision Challenge, il est temps de réfléchir à ce que vous avez appris et fait dans cette leçon. Commencez une nouvelle page dans votre carnet d’ingénierie pour débuter votre réflexion.
Évaluez-vous comme novice, apprenti ou expert sur chacun des concepts suivants dans votre carnet d’ingénierie. Donnez une brève explication des raisons pour lesquelles vous vous êtes attribué cette note pour chaque concept :
- J'applique mes connaissances en matière de contrôle de pilote personnalisé sur l'EXP Brain et dans VEXcode EXP pour coder mon robot afin d'obtenir le score le plus élevé possible dans le Split Decision Challenge
- Planifier et exécuter un projet qui permet à mon robot de relever le défi de décision partagée de manière autonome
- Utiliser plusieurs emplacements de projet sur l'EXP Brain afin d'obtenir le score le plus élevé possible dans le Split Decision Challenge
- Collaborer avec les membres de mon équipe pour créer une stratégie globale pour le Split Decision Challenge
Utilisez ce tableau pour vous aider à déterminer dans quelle catégorie vous appartenez.
| Expert | Je sens que j’ai parfaitement compris le concept et que je pourrais l’enseigner à quelqu’un d’autre. |
| Apprenti | Je sens que j’ai suffisamment compris le concept pour participer au défi. |
| Novice | J'ai l'impression de ne pas avoir compris le concept et je ne sais pas comment relever le défi. |
Quelle est la prochaine étape ?

Dans cette leçon, vous avez appris à personnaliser le contrôle du conducteur et à planifier et coder votre robot pour qu'il se déplace de manière autonome. Vous avez pratiqué l’élaboration d’une stratégie pour réaliser des activités en utilisant le contrôle du conducteur et de manière autonome. Vous avez également appris comment et pourquoi utiliser plusieurs emplacements de programme dans VEXcode EXP. Il est maintenant temps de participer au concours Ring Leader !
Dans la prochaine leçon, vous allez :
- Passez en revue les règles du concours
- Développer une stratégie de jeu
- Participez au concours Ring Leader !
Sélectionnez < Revenir aux leçons pour revenir à l’aperçu de la leçon.
Sélectionnez Leçon suivante > pour continuer vers la leçon 5 et apprendre comment participer au concours Ring Leader !