
แข่งขัน
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับการใช้โปรแกรมควบคุมอัตโนมัติและโปรแกรมควบคุมคนขับเพื่อบังคับหุ่นยนต์ของคุณเพื่อรวบรวมและทำคะแนนวงแหวน รวมถึงเรียนรู้วิธีการและเหตุผลที่ต้องใช้ช่องโปรแกรมหลายช่องใน VEXcode คุณได้ฝึกฝนการปรับปรุงกลยุทธ์ของคุณสำหรับการควบคุมคนขับและการเคลื่อนไหวอัตโนมัติ และตอนนี้ คุณพร้อมที่จะนำสิ่งที่เรียนรู้ไปใช้กับ Split Decision Challenge แล้ว!
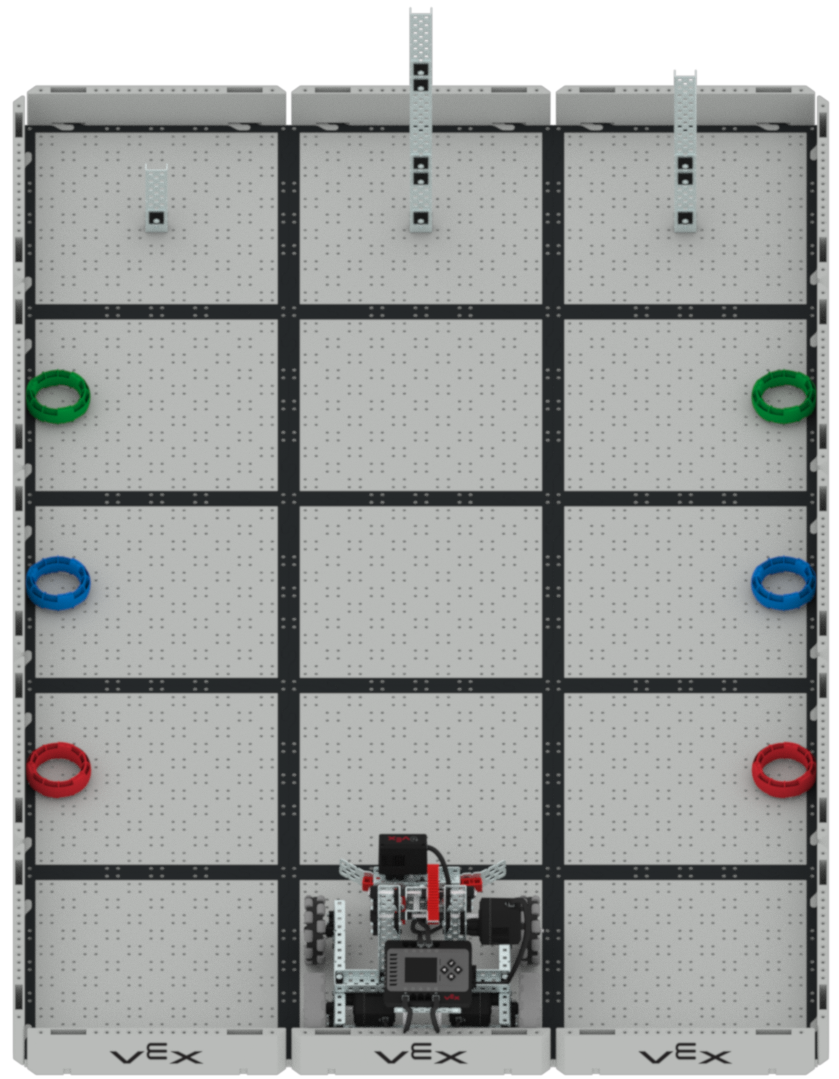
เป้าหมายของความท้าทายนี้คือการได้คะแนนสูงสุดด้วยการคว้า เคลื่อนย้าย และทำคะแนนให้ได้ 4 ห่วงบนเสาขนาดกลางภายในเวลา 30 วินาที 2 ครั้ง การวิ่งครั้งหนึ่งจะเป็นการควบคุมโดยคนขับ และอีกครั้งจะเป็นแบบอัตโนมัติ แอนิเมชั่นด้านล่างนี้แสดงให้เห็นวิธีการตั้งค่าสนาม รวมไปถึงวิธีการเล่นและคะแนนทั้งสองครั้ง หุ่นยนต์ที่ได้คะแนนมากที่สุดเป็นผู้ชนะ
ในวิดีโอข้างล่าง Clawbot จะอยู่ทางด้านซ้ายของสนาม หันหน้าเข้าหาเสาขนาดกลางที่ติดอยู่ตรงกลาง Field Tile ห่างจากหุ่นยนต์ 4 แถวใกล้กับกำแพงด้านขวา มีแหวนอยู่สี่วงในสนาม แผ่นแรกจะอยู่ตรงกำแพงสนามด้านบน ระหว่างแผ่นที่สองและสาม และแผ่นที่สองจะอยู่ตรงกำแพงสนามด้านบน ระหว่างแผ่นที่สามและสี่ วงแหวนที่สามและที่สี่วางอยู่ตรงข้ามกับวงแหวนแรกและวงที่สองโดยตรง โดยชิดกับผนังสนามด้านล่าง มีนาฬิกาจับเวลาอยู่เหนือ Field ตั้งไว้ที่ 30 วินาที พร้อมไอคอน Brain ซึ่งแสดงว่านี่คือส่วนที่เป็นอิสระของความท้าทาย วิดีโอจะเริ่มนับถอยหลังจากสาม Clawbot เคลื่อนที่ไปหยิบแหวนและวางไว้บนเสา และทำคะแนนได้สามในสี่คะแนนก่อนที่เวลาจะหมดลง ทำให้ได้คะแนนอัตโนมัติ 9 คะแนน การควบคุมการขับขี่เริ่มต้นด้วยการนับถอยหลัง: 3, 2, 1 Clawbot ขับไปหยิบและวางแหวนไว้บนเสา และได้ 3 แหวนก่อนจะหมดเวลา คะแนนสุดท้ายสำหรับการขับขี่อัตโนมัติคือ 9 คะแนน และคะแนนควบคุมผู้ขับขี่สุดท้ายคือ 9 คะแนน โดยมีคะแนนรวม 18 คะแนน
ปฏิบัติตามขั้นตอนในเอกสารนี้เพื่อทำการท้าทายการตัดสินใจแบบแยกกัน Google / .docx / .pdf
เมื่อคุณทำแบบทดสอบ Split Decision Challenge เสร็จแล้ว ให้ติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้สร้างกลยุทธ์และแข่งขันใน Split Decision Challenge แล้ว ถึงเวลาที่จะทบทวนสิ่งที่คุณได้เรียนรู้และได้ทำในบทเรียนนี้ เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะมือใหม่ ผู้ฝึกหัด หรือผู้เชี่ยวชาญในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองในแต่ละแนวคิดดังนี้:
- การนำความรู้ของฉันเกี่ยวกับการควบคุมไดรเวอร์แบบกำหนดเองบน EXP Brain และใน VEXcode EXP มาใช้ในการเขียนโค้ดหุ่นยนต์เพื่อให้ได้คะแนนสูงสุดในการท้าทาย Split Decision
- การวางแผนและดำเนินโครงการที่ให้หุ่นยนต์ของฉันทำภารกิจ Split Decision Challenge สำเร็จโดยอัตโนมัติ
- ใช้ช่องโครงการหลายช่องใน EXP Brain เพื่อให้ได้คะแนนสูงสุดในการท้าทายการตัดสินใจแบบแยกส่วน
- ร่วมมือกับสมาชิกในทีมเพื่อสร้างกลยุทธ์โดยรวมสำหรับความท้าทายในการตัดสินใจแบบแยกส่วน
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ผมรู้สึกว่าผมเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าฉันไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับการปรับแต่งการควบคุมของผู้ขับขี่ และวิธีการวางแผนและเขียนโค้ดให้หุ่นยนต์ของคุณเคลื่อนที่ได้โดยอัตโนมัติ คุณได้ฝึกฝนการพัฒนากลยุทธ์ในการทำกิจกรรมให้สำเร็จโดยใช้การควบคุมของผู้ขับขี่และอัตโนมัติ นอกจากนี้ คุณยังได้เรียนรู้วิธีการและเหตุผลในการใช้ช่องโปรแกรมหลายช่องใน VEXcode EXP. ถึงเวลาเข้าแข่งขันใน Ring Leader Competition แล้ว!
ในบทเรียนถัดไป คุณจะ:
- ทบทวนกฎกติกาการแข่งขัน
- พัฒนากลยุทธ์เกม
- ร่วมแข่งขันใน Ring Leader Competition!
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก ถัดไป บทเรียน > เพื่อไปต่อที่บทเรียนที่ 5 และเรียนรู้วิธีการเข้าร่วมการแข่งขัน Ring Leader!